
未知时变环境下机器人自校正阻抗控制研究
2021-06-27 08:03:20曾献文翟敬梅
机械设计与制造 2021年6期
曾献文,翟敬梅
(华南理工大学机械与汽车工程学院,广东 广州 510000)
1 引言
随着“中国制造2025”制造强国战略的不断推进,机器人已经在工业、服务业领域获得越来越广泛的应用,工作任务也不再仅仅需要位置控制,在面对诸多作业场合如人体按摩、皮下注射、柔性体抓取等操作时,需要进行机器人位置和力的双重控制如阻抗控制。不同于刚性体,上述作业对象具有柔顺材料典型的非线性弹性等特征;另一方面,作业对象为非结构化环境,不同作业对象往往具有不同的力学特性,即使同一对象,不同区域的力学特性往往由于生物体征、组织结构等因素而存在变化。上述材料种类及其力学特性的不确定导致阻抗控制力跟踪误差较大甚至失去力跟踪能力。
相关研究表明机器人力、位控制器如阻抗控制器的稳定性及精准性受到环境力学特性的直接影响[1],因此对环境接触动力学的研究能够有效改善机器人阻抗控制器力控制性能。相关工作如李臣[2]在人体按摩机器人柔顺控制中采用纯刚度模型描述机器人与环境之间的接触动力学特征。Jones K.C[3]、Koga H[4]基于Kelvin-Voigt模型描述环境动力学对面向人体表面工作的机器人进行力和位置双重控制。上述研究的接触动力学模型是线性的,适用于刚性材料的线弹性特征,但对于肌肤之类柔顺材料,则无法描述其非线性弹性特征[5]。Hunt–Crossley(HC)模型通过位置和阻尼的耦合同时引入幂指数项,同时表征刚性和柔顺材料的力学特征[6]。文献[7]基于HC模型建立按摩机器人与人体接触时浸入深度方向上的受力模型,适应肌肤柔性体的非线性弹性等生物力学特征,但是未应用于实际控制系统。
阻抗控制要求建立准确的机械手与环境之间的接触动力学模型,在未知环境下由于接触动力学模型参数未知,因此阻抗控制器不能实现稳定力位跟踪控制效果,需要在经典控制的基础上进行自适应调整。研究[8]采用自校正控制在未知环境下进行环境参数的在线辨识和控制量的预测调整,但是采用的基于递推最小二乘辨识算法的自校正控制无法适用于接触动力学参数存在时变的控制对象。陈双[9]基于遗忘因子递推最小二乘法对汽车座椅非线性模型参数进行在线辨识克服了传统递推最小二乘算法在面向时变参数时的数据饱和现象。类似地,基于窗函数的最小二乘法[10]在传统最小二乘算法中引入矩形窗,去除旧数据而只截取一段长度的新数据进行模型参数辨识。但是上述形式的递推最小二乘法通常难以兼具收敛性和跟踪性,无法很好地满足未知时变环境下的参数实时辨识需求。针对上述研究现状及问题,基于HC接触动力学模对阻抗控制进行位置规划,引入自扰动递推最小二乘辨识算法(SPRLS)至最小方差自校正控制中,实现对未知且时变环境下的接触动力学模型参数的实时辨识和对阻抗控制参考位置的自适应调整,研究方法可有效跟踪辨识材料(包括刚性和柔性)的力学特性,并对其进行实时、准确的力位跟踪控制。
2 基于HC非线性模型的阻抗控制系统
基于位置的阻抗控制中位置误差x-xd与力误差Fr-F之间的传递函数G(s):

式中:Md、Bd、Kd—期望阻抗模型的惯性矩阵、阻尼矩阵和刚度矩阵,x—机器人末端实际位置,xd—机器人期望的轨迹,在浸入深度方向上,xd—达到期望接触力所需要的机器人末端运动位置。F—机器人末端与环境的实际接触力,Fr—期望力。实际控制时,xd不能直接得到,通过接触动力学模型计算得到期望力对应的位置记为xr,称为参考位置。
HC接触动力学模型[6]具有如下形式:

式中:LkHC和bHC—弹性和阻尼系数,n—由接触体的局部接触区域中的材料和几何性质决定的幂指数,n的存在使HC模型更好的描述接触力随侵入深度的非线性变化,当指数n=1时则表征了线弹性物体的力学特性。
基于HC模型进行xr的预测输入,此时机器人末端执行器达到目标位置便不再进给,进给速度x˙=0。此时的接触力fHC=Fr,机器人末端位置x=xr,xe是环境未受力变形时的初始位置。代入上式(2)得到:

建立面向柔顺和刚性材料的阻抗控制系统框架,如图1所示。
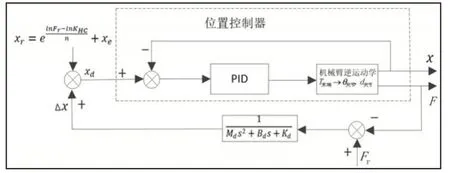
图1 基于HC模型的阻抗控制系统Fig.1 Impedance Control System Based on HC Model
3 面向未知环境的融合SPRLS算法的自校正阻抗控制系统
基于HC模型的阻抗控制算法中,系统输入xr的确定,需kHC、n、xe等环境参数,而实际控制中这些参数往往未知;不同作业区域的力学特性存在变化,机器人在不同区域间运动导致接触动力学参数存在时变;且单纯阻抗控制还未考虑信号噪声、工业延时等干扰因素的影响,以上环境力学特性参数的不确定性和外界干扰将会对传统阻抗控制的力跟踪性能产生不利影响。
为适应未知、时变作业对象的动力学特性,提出融合最小方差控制与SPRLS算法的自适应阻抗控制系统,通过前向检测预测误差来判断环境力学特性的变化,并据此设置自扰动项,实现对接触动力学模型参数的实时跟踪辨识;同时,基于辨识结果设计最小方差自校正调节器,实现对未知时变环境下阻抗控制参考位置的自适应调整,具体结构,如图2所示。
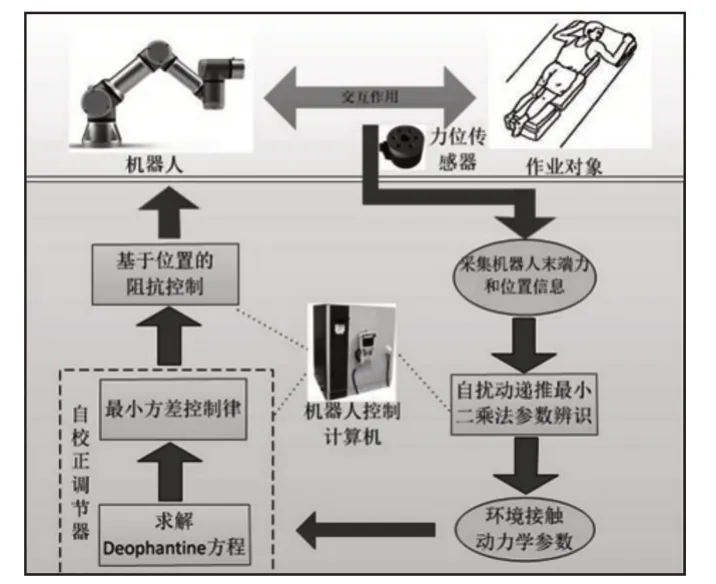
图2 融合SPRLS算法的自校正阻抗控制系统结构框架Fig.2 Structure of Self-Tunning Impedance Control System with SPRLS Algorithm
3.1 HC模型的自扰动递推最小二乘参数辨识
自扰动递推最小二乘法核心思想是在线辨识的过程中检测前向预测误差,据此设置自扰动项,在前向预测误差大于阈值时,介入自扰动项增加参数递推估计时的迭代量。在前向预测误差小于阈值时,自扰动项归零,等效于标准递推最小二乘算法,不影响收敛性。实现辨识算法对环境参数变化的快速响应以及参数辨识的收敛性,算法流程见图3模块1。
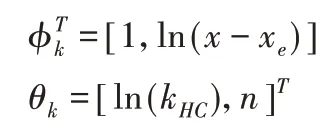
普通辨识算法不适用于对于HC模型的非线性结构,目前的解决方案有二阶辨识算法[6]和一阶辨识算法[11],相比于二阶辨识算法,一阶辨识算法将模型转化为线性化形式,其收敛条件更易于满足,具有更高的鲁棒性。故使用一阶辨识算法将HC模型转换为线性形式,并采用自扰动递推最小二乘法对其进行单点参数辨识。根据对HC模型下参考位置的推导式(3)整理并经一阶辨识算法对等式两边取自然对数,化为如下线性形式:

上式(4)写成最小二乘形式:

其中,Yk=ln(F)
按照自扰动递推最小二乘法,算法的递推方程如下:

式中:β和γ—扰动增益和误差增益;I—单位矩阵,NINT()的表达式为:

3.2 基于参数辨识结果的最小方差自校正调节器设计
自校正控制系统在获取模型参数辨识的同时,最小方差自校正调节器按照最小输出方差为目标进行输入调整。其基本思想:由于机器人控制存在纯延迟d,因此要使输出方差最小就需要提前d步对输出量做预测并设计所需控制。对式(4)进行参数辨识后,对应如下形式的时间平移算子多项式:

其中,u=ln(x-xe);y=ln(F)-ln(kHC);

ξ(k)—方差为σ2噪声,d≥1—控制延时。
基于k时刻的输入和输出,对k+d时刻的输出的预测记作,则预测误差:。

式中E、F、G式满足如下Deophantine方程:
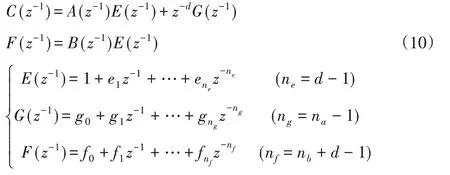
B(z-1)为Hurwitz多项式,设控制目标是使输出y(k+d)跟踪期望输出yr(k+d)要满足如下性能指标:

最小方差控制率为:

最小方差自校正调节器结构见图3模块2。
基于前述自校正控制算法进行阻抗控制参考位置自适应调整,根据对自校正调节器输入u的最优预测,将u中的机器人末端位置量x作为阻抗控制参考位置输入图3模块3所示的阻抗控制系统实现对阻抗控制的位置修正。具体算法及其相互关系,如图3所示。
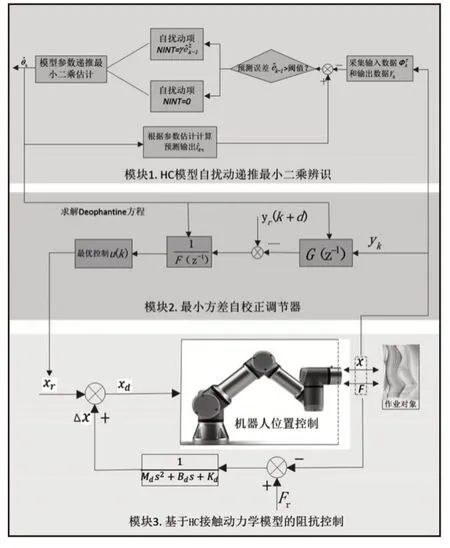
图3 融合SPRLS算法的自校正阻抗控制系统Fig.3 Self-Tunning Impedance Control System with SPRLS Algorithm
4 仿真实验及分析
为模拟环境力学特性参数未知且在不同作业区域间存在差异的应用场景,设基于HC模型的环境动力学参数未知且时变,线弹性和非线性弹性两种环境并存。设环境的真实动力学特性如下:
第(0~100)个采样周期内:F=1.9(x-6);
第(101~200)个采样周期内:F=2(x-7.5)1.2;
第(201~400)个采样周期内:F=2.5(x-9)1.4。
第(0~150)个采样周期内期望力Fr=10N,(151~300)个采样周期内Fr=5N,(301~400)个采样周期内Fr=10N。
这里设xe在6、7.5、9间变化,可经视觉设备获取。设机器人延时d=4,外界干扰为方差为0.05的白噪声;阻抗控制的阻抗参数设为Md=65Bd=15Kd=1。
仿真结果如图4~图6及表1、表2所示,k为第k个采样周期。
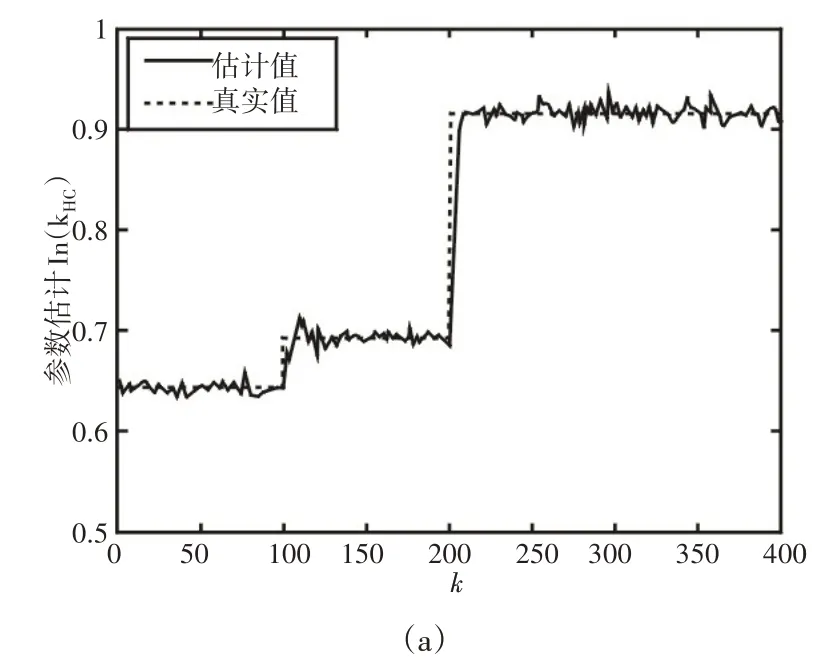
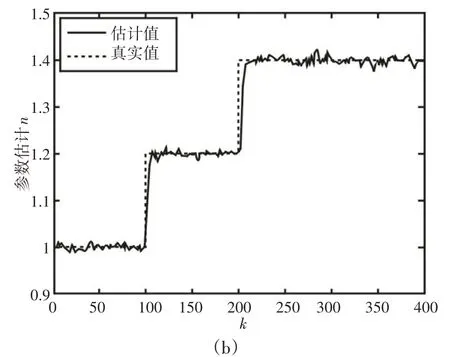
图4 参数ln(kHC)、n辨识过程Fig.4 Identification Process of Parameter ln(kHC)、n
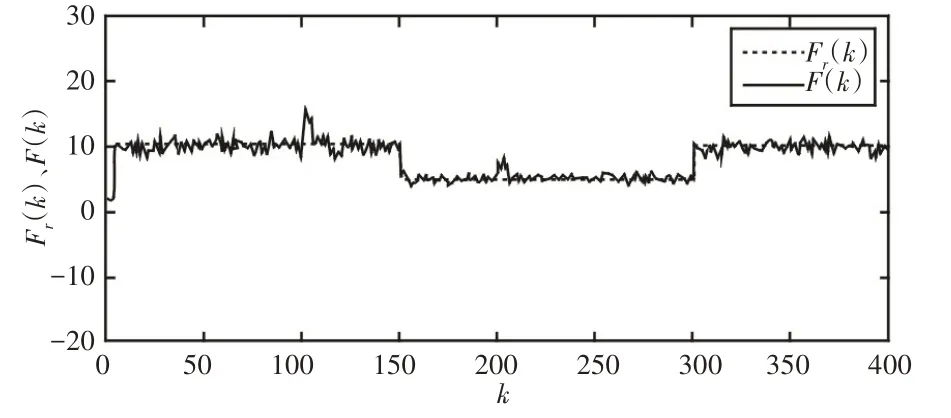
图5 自适应阻抗控制系统力跟踪效果Fig.5 Force Tracking Effect of Adaptive Impedance Control System
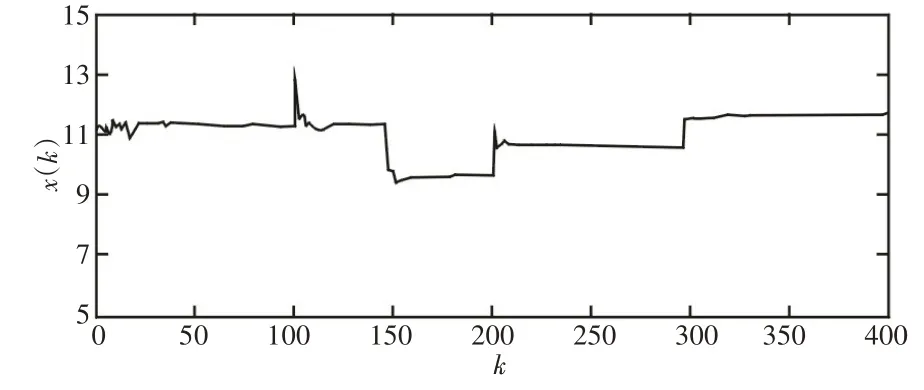
图6 机器人末端浸入环境方向的位置量Fig.6 Amount of Robot Tip’s Position Immersed in the Environment.

表1 力跟踪稳态误差Tab.1 Steady State Error of Force Tracking

表2 环境突变时控制效果Tab.2 Control Effects when the Environment is Changed
在仿真实验中,环境模型事先未知,且在多个时刻存在参数的突变,期望力也存在变化,实验结果及分析可见:
(1)由表1和图5中稳态接触力可见,接触力稳态均值与期望值吻合,误差小于2%,力控制效果稳定良好。
(2)由图4可见SPRLS算法对时变环境特性参数能够实现较好的跟踪辨识,且当环境参数发生变化时,由表2和图6可见接触力存在短暂小范围变化后便稳定到期望值,对于期望力的变化也能实现很好的力跟踪效果。
(3)由图6可见在接触面浸入方向上,机器人末端始终与环境有效接触并根据力跟踪需求调整浸入深度。
为了进一步验证所提出的算法合理性,与当前多种算法进行了对比仿真试验:基于HC模型分别结合递推最小二乘(RLS)、窗函数递推最小二乘(BLS)[10]、遗忘因子递推最小二乘(FFRLS)辨识方法[9]的最小方差自校正控制(MVSTC)算法。对比实验结果,如图7、图8及表3所示。

图7 对比试验结果Fig.7 Results of Comparitive Experiment
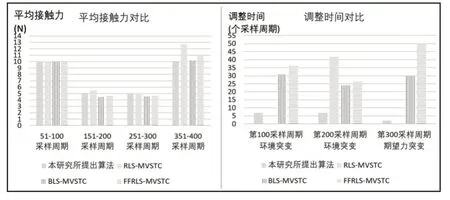
图8 算法力跟踪性能对比Fig.8 Comparison of Different Algorithms’Force Tracking Performance
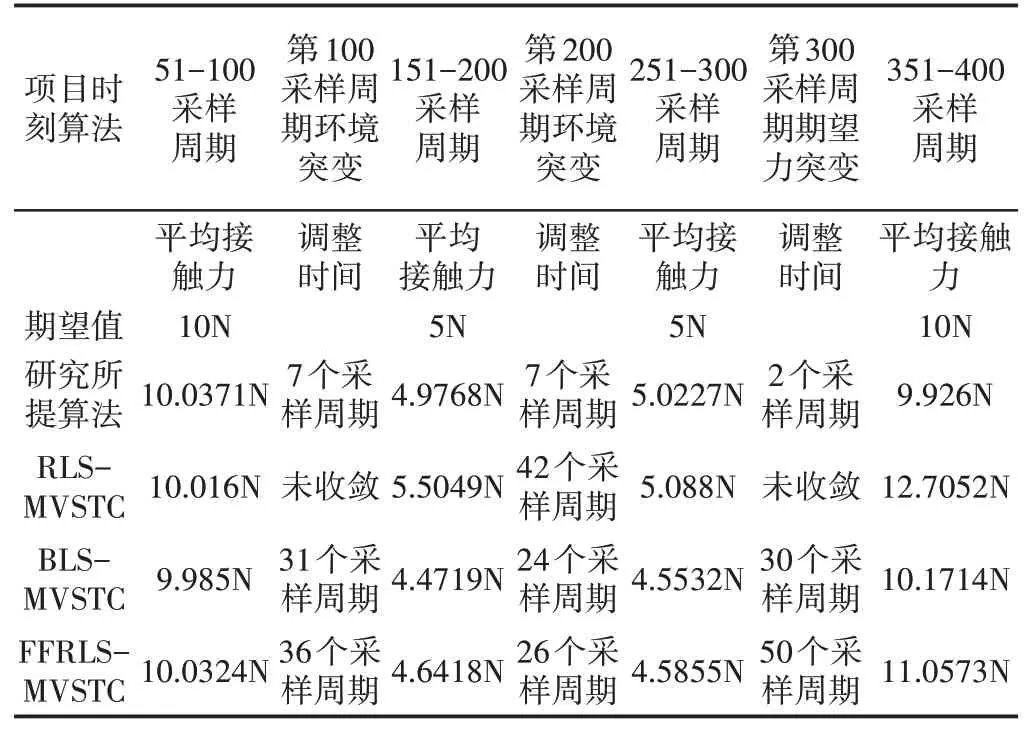
表3 对比实验力跟踪数据分析Tab.3 Force Tracking Data Analysis of Comparative Experiments
由图7、图8及表3对比试验结果可知:
对于非线性弹性接触环境,由于实际跟踪控制要基于其线性化后的数学对象,因而所提算法及对比实验在环境力学特性突变时力突变均存在一定误差扩大,但是在以下方面有较大区别:
(1)传统基于递推最小二乘辨识的自校正控制不能适应环境力学特性的变化,环境力学特性出现变化时会产生力跟踪误差,最大达期望值的27%,本研究所提算法的稳态接触力误差则小于期望值的2%;
(2)期望力发生变化时,本研究所提算法能够很快调整进给量实现实时跟踪,其他三种算法则有较大延时。
(3)基于窗函数递推最小二乘和遗忘因子递推最小二乘参数辨识的自校正控制,在环境力学特性变化时的跟踪调整时间较大,本研究所提算法调整时间减少约70%。
可见环境参数存在未知和变化时,基于HC模型,结合自扰动递推最小二乘辨识的最小方差自校正阻抗控制能够保持柔顺控制能力的基础上,具有较快的反应速度和收敛能力,控制效果准确稳定。
5 结论
针对当前环境力学特性未知或时变下的力位控制问题,提出了基于HC接触动力学模型的自校正阻抗控制算法,在多个时变环境下进行仿真实验与分析,验证了提出方法的适用性和有效性,该算法具有如下优点:
(1)基于HC接触动力学模型指导机器人阻抗控制的参考位置规划,阻抗控制系统对柔顺材料和刚性材料都具有较好适用性。
(2)在环境动力学特性未知且存在时变的情况下,提出的结合SPRLS算法的自校正阻抗控制系统,能够快速稳定地跟踪辨识接触动力学参数,并克服机器人控制延时,实时自适应调整阻抗控制参考位置,稳态力跟踪误差小于2%,环境特性突变时的控制调整时间仅约7个采样周期。
猜你喜欢
中学生数理化·七年级数学人教版(2023年6期)2023-05-25 12:17:42
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09 06:09:10
国学(2020年1期)2020-06-29 15:15:30
中学生数理化·七年级数学人教版(2019年6期)2019-06-25 01:01:32
数学物理学报(2017年6期)2018-01-22 02:26:53
初中生世界·九年级(2017年10期)2017-11-08 21:30:36
摄影之友(影像视觉)(2017年1期)2017-07-18 11:12:16
智富时代(2017年4期)2017-04-27 17:08:47
广东石油化工学院学报(2016年6期)2016-05-17 05:17:43
中国铁道科学(2015年4期)2015-06-21 06:46:08
