森林防火监测机器人设计研究
2021-06-24 06:23石宇梦刘泽新廖福兰傅可艺宋星竹
林业机械与木工设备 2021年6期
石宇梦, 李 彤, 刘泽新, 廖福兰, 傅可艺, 宋星竹
(东北林业大学工程技术学院,黑龙江 哈尔滨 150040)
森林火灾是一种突发性强、破坏力大、对森林生态系统和人类都具有巨大破坏力的自然灾害[1],是破坏森林的三大自然灾害之首。由于林区地形复杂多变,地面不同于城市道路,灌木丛、沟壑、斜坡等地形环境会严重影响消防机器人的行走效率[2-3]。大部分森林防火设备在行进过程中的越障能力都较低,存在越障困难问题,不适合在林区复杂地形行进。由于森林防火监测设备匮乏,导致森林火灾未能得到及时可靠地预防,而人工监测不易实现且成本较高。目前对城市火灾救援作业设备研究较多,对森林火灾领域防火设备的研究甚少,发展自动化森林防火监测装备具有重大的意义。
目前国内外均有消防机器人的研究,消防机器人的研究始于20世纪60年代,由国外先开始研究。日本由于地理位置特殊,较早地将消防机器人投入使用,如1986年日本研制的“彩虹五号”机器人首次被应用于火灾现场[4]。美国海军研究实验室于2014年研制了双足式人型消防机器人SAFFIR[5],该机器人采用多传感器,并配备红外摄像机可识别烟雾中的火源,可以在颠簸不平的地面多方向行走。另外,美国Vecna Robotics公司的大熊机器人[6]适用于多种灾害环境的救援,其存在两种行走模式,平坦路面为轮式行走,坑洼路面为履带式行走,并能“屈膝”降低重心,以减小振动,其还具有优秀的负重能力,可负重227 kg。
我国森林作业机器人研究起步较晚,在“863”计划支持下,对消防机器人做了大量研究并取得了较好成绩[7]。沈阳自动化研究所研制的“CLIMBER”机器人可进行雪地行走及雪丘攀爬,可搭载40 kg重量,也可进行森林消防作业[8]。钱钧等研制的JMX-LT50型消防机器人采用轮式结构,具有行走快速的优点,行走速度达到3.6 km/h[9]。东北林业大学孙上杰等根据森林情况设计了一种轮履混合式森林巡防机器人和履带式遥控风力灭火机[10]。南京林业大学姜树海和张楠设计了一种六足森林消防机器人,并对机器人的运动和执行机构进行了仿真[11]。
通过对比国内外的各种消防设备,特别针对机器人在障碍较多的林下地形行走问题,本文基于Solidworks三维软件设计了一种八足森林防火监测机器人,其通过底盘支架的支撑达到较好的清障效果,满足在林区复杂的地形条件下能够正常行走的要求,并利用机械臂能够清除林区一些高大的灌木和杂草,同时通过对烟雾和温度的感知,达到监测火灾的目的,替代人力实时监测。
1 整体结构方案设计
根据防火监测机器人的功能和主要要求得到防火监测机器人的系统关系如图1所示。

图1 防火监测机器人的系统关系
该新型防火监测机器人主要由八只仿生机械足、底盘支架、清障机械臂及监测装置四大部分组成。其中底盘支架又包括支架部和承重部。
八足森林防火监测机器人的总体结构示意图如图2所示。根据其用于森林地区的要求,为满足轻便化的需求,设计的八足森林防火监测机器人的支架部为长条形结构且内部安放有驱动元器件,仿生机械足的数量为8个,分列在支架部的两侧,以满足机器人的行走需求。仿生机械足与支架部的侧端面转动连接,支承部的数量为4个,均布在支架部的下方并与支架部的下端面固定连接,监测装置竖直设置在支架部上端面中部,清障机械臂水平安装在支架部前方,清障机械臂位于支架部长度方向的中线上。

图2 八足森林防火监测机器人总体结构示意图
2 关键结构设计
2.1 八只仿生机械足设计
仿生机械足是整个防火监测机器人的关键部件,八只机械足的协调运动保证了整个机器人在森林中的越障和行走效果。
每个仿生机械足包括足部、小腿连杆、大腿连杆、踝关节电推杆、膝关节电推杆、髋关节电推杆、踝关节销轴、膝关节销轴、髋关节销轴、T型铰链座和两个耳板。
足部通过踝关节销轴与小腿连杆铰接,踝关节电推杆的缸体与小腿连杆侧壁铰接,踝关节电推杆的缸杆与足部侧壁铰接。
小腿连杆通过膝关节销轴与大腿连杆铰接,膝关节销轴的缸体与大腿连杆侧壁铰接,膝关节销轴的缸杆与小腿连杆侧壁铰接。
大腿连杆端部与T型铰链座一端固接,T型铰链座另一端通过髋关节销轴与两个耳板铰接,两个耳板端部与支架部的侧端面固接,髋关节电推杆的缸体与耳板侧壁铰接,髋关节电推杆的缸杆与大腿连杆侧壁铰接。仿生机械足由电力推杆提供动力,通过踝关节电推杆、膝关节电推杆、髋关节电推杆保证仿生机械足的行走。
该仿生机械足由电推杆作为主要驱动件,通过三个电力推杆的伸缩来实现踝关节、膝关节和髋关节的转动,进一步实现整个仿生机械足的运动。在整个机器人系统中通过驱动系统和控制系统实现各个仿生机械足的协调运动。通过机器人的视觉系统实现对森林路面环境的监测,对整个地形进行相应反馈,信号达到驱动系统即三个关节位置的电力推杆,实现仿生机械足的运动,并通过控制系统进行八个机械足的相互协调,保证行走和越障能力。
2.2 清障机械臂设计
清障功能机械臂是辅助防火监测机器人行走的主要部件,通过对前方道路杂草、细枝的切除,扫清前进的障碍,以满足防火监测机器人的通行条件。
清障机械臂包括第二旋转支承机构、第二伸缩杆、圆锯、圆锯安装座和连接轴。清障机械臂拥有三个自由度,分别是底盘的转动、机械臂的伸缩和末端圆盘锯沿轴方向的转动。机械臂主要通过旋转支承和电力推杆完成整个机械臂的动作。圆盘锯则通过整个电机驱动工作,以切割杂草和细枝。
其中,清障机械臂旋转通过第二旋转支承机构实现,清障机械臂固定安装在底盘支架的前方,保证及时清障,并通过前方圆锯及其自身的转动与伸缩实现清障功能。
2.3 监测装置
监测装置是整个防火监测机器人的核心功能部件,机器人通过监测装置实现了对火灾的监测功能,并同时通过摄像头进行图像识别,从而进行路径规划和仿生机械足的协调行进。
监测装置有两个自由度,分别是其底部的旋转和整个装置的上下抬升。旋转通过第一旋转支承机构实现,监测装置伸缩通过第一伸缩杆实现。为实现监测装置的监测功能,监测装置上安装有烟雾传感器和温度传感器,用于监测烟雾和温度,使森林火灾得到及时可靠地预防。并通过监测装置本身的上下抬升和360°的旋转,进行较远距离的监测与探查。
为满足整个防火监测机器人视觉系统的要求,监测装置同时安装有摄像头,通过摄像头图像实时传送给控制系统的视觉处理单元,进一步实现路径规划和仿生机械足行走。
整个八足防火机器人的主体结构示意图如图3所示,其中图3(a)为机器人的主视结构示意图,图3(b)为机器人的侧视结构示意图,图3(c)为机器人的俯视结构示意图。
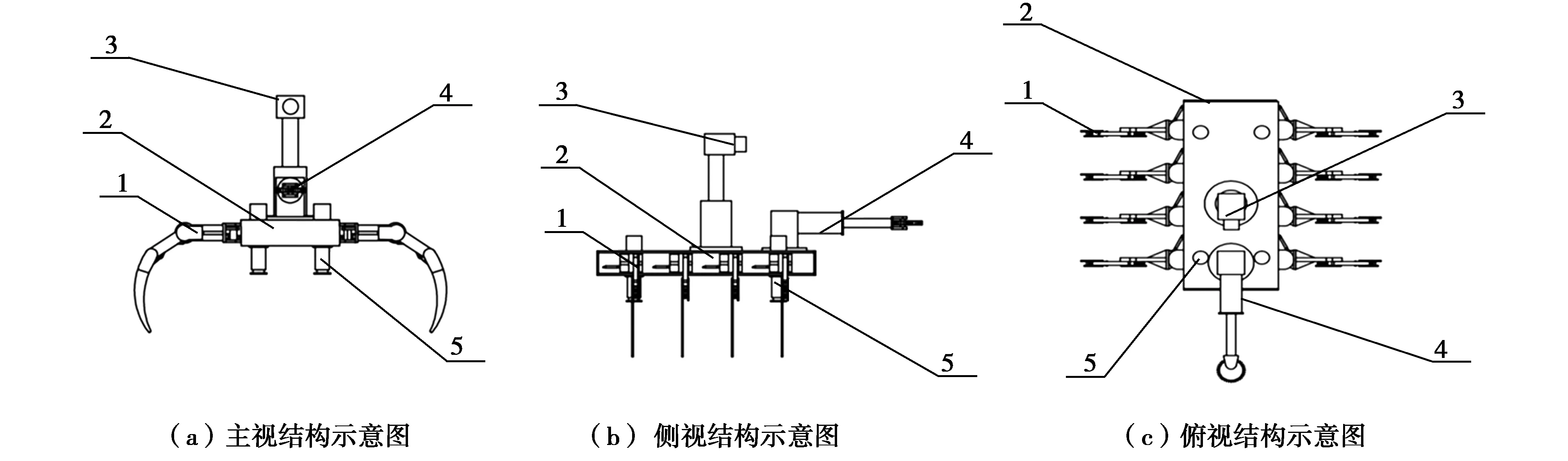
图3 八足防火机器人主体结构示意图
3 工作原理
八足森林防火监测机器人的工作原理如下:通过仿生机械足上各关节电力推杆的伸缩实现整个机器人的移动,并且配合八个仿生机械足的协调进行有效越障,安装于支架部上方的清障机械臂通过前方圆锯及其自身的转动与伸缩实现清障功能,清障过程中通过固定在支架部下方支承部的支撑保证更好的清障效果;位于支架部上方的监测装置通过自身的伸缩与旋转实现多方位的监测功能,从而实现防火监测。
4 总结与展望
八足森林防火监测机器人通过八只仿生足协调配合移动实现在不同地形的行走,在行走过程中通过每个足的关节调节,进而调节其在各种地形的适应性,增加机器人的稳定性,使机器人可以平稳地通过各种障碍。机器人上端附一条清障吊臂,进一步辅助机器人的行进。机器人上方的无线集成传感器,通过检测一定范围内的温湿度及烟雾浓度进行预判,做到在发生火情时及时报警,通过无线传输,将火点信息迅速准确反馈到控制台,提高了火灾检测的精度和灵敏度,也为火灾扑救节省了时间。
本文主要研究了八足森林防火机器人的机械结构部分,其未来应向高阶智能化发展,通过智能化控制系统实现更加灵活的行走,配合更加合适的监测设备能达到更加精准的火灾监测效果。
猜你喜欢
宝钢技术(2022年4期)2022-12-23
闽江学院学报(2021年5期)2021-11-19
湖北工业大学学报(2021年5期)2021-11-03
太原理工大学学报(2021年5期)2021-09-22
科学与生活(2021年9期)2021-09-01
兵器装备工程学报(2020年12期)2021-01-12
煤矿机电(2020年5期)2020-11-02
中国科技纵横(2017年17期)2017-10-19
专用汽车(2017年8期)2017-09-03
专用汽车(2017年5期)2017-06-05