
NN型渐开线少齿差行星减速器承载能力实验及齿轮修形方法研究*
2021-06-22 07:40冯晓宁
机电工程 2021年6期
张 辉,冯晓宁
(嘉兴学院 机械工程学院,浙江 嘉兴 314001)
0 引 言
渐开线少齿差行星减速器是一种大传动比、高效率、小体积、大承载能力的减速器,适用于机器人等精密机械传动系统。NN型渐开线少齿差行星减速器(下文简称NN型减速器)采用少齿差内齿轮副传动,内齿轮副的外齿轮齿廓是凸面,内齿轮副的内齿轮齿廓是凹面,凸面与凹面啮合时,啮合齿对之间的齿面间隙很小,其在承受大载荷时会发生较大的弹性形变,弹性形变会消除啮合齿对之间的齿面间隙,形成多对轮齿同时参与啮合的情况,称为多齿啮合现象。多齿啮合现象会显著提高轮齿轮的承载能力[1-3]。
冯晓宁等人[4-6]利用理论计算和静态有限元方法,分析了NN型渐开线少齿差行星传动的多齿啮合现象、弯曲强度和承载能力等;刘文吉[7]采用ANSYS软件,对NN型渐开线少齿差行星传动进行了动态接触仿真分析,通过齿轮修形仿真有效改善了齿轮的啮合状况;汤兆平[8]采用Romax软件进行了齿轮修形动态接触仿真分析,有效改善了齿轮的传动性能。
减速器承载能力是减速器能承受的最大载荷,是评价减速器性能的重要参数。目前,还没有看到NN型减速器承载能力的相关实验研究文献,因此,通过实验的方式来研究NN型减速器的承载能力有一定的工程意义。
针对NN型渐开线少齿差行星减速器传动系统中的双联齿轮偏载现象严重的问题,本文采用Romax软件对NN型减速器进行齿轮修形动态仿真分析,并在减速器载荷实验台上进行相关的实验。
1 减速器结构及其虚拟样机
NN型减速器是采用两对少齿差内齿轮副传动的行星减速器,其机构简图如图1所示。
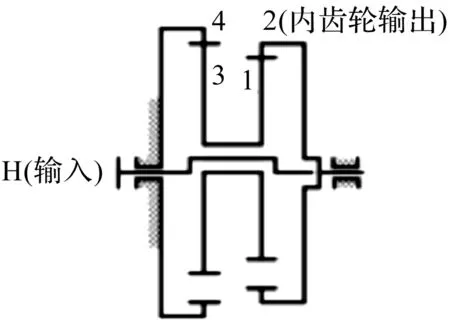
图1 NN型减速器的机构简图1—双联齿轮z1;2—输出内齿轮z2;3—双联齿轮z3;4—内齿轮z4
NN型减速器的内齿轮副通常使用短齿直齿轮,齿数差在5齿差之内[9-11]。为了保证重合度系数Yε>1且齿廓重叠干涉条件GS≥0.1,笔者在此处以4齿差NN型减速器的内齿轮副为例,确定的主要参数有:

主要参数值如表1所示。
根据表1,笔者建立NN型减速器的虚拟样机,主要由输出内齿轮轴、双联齿轮、配重齿轮、双曲柄轴、内齿圈、轴承端盖等组成,如图2所示。

表1 NN型减速器的齿轮副主要参数
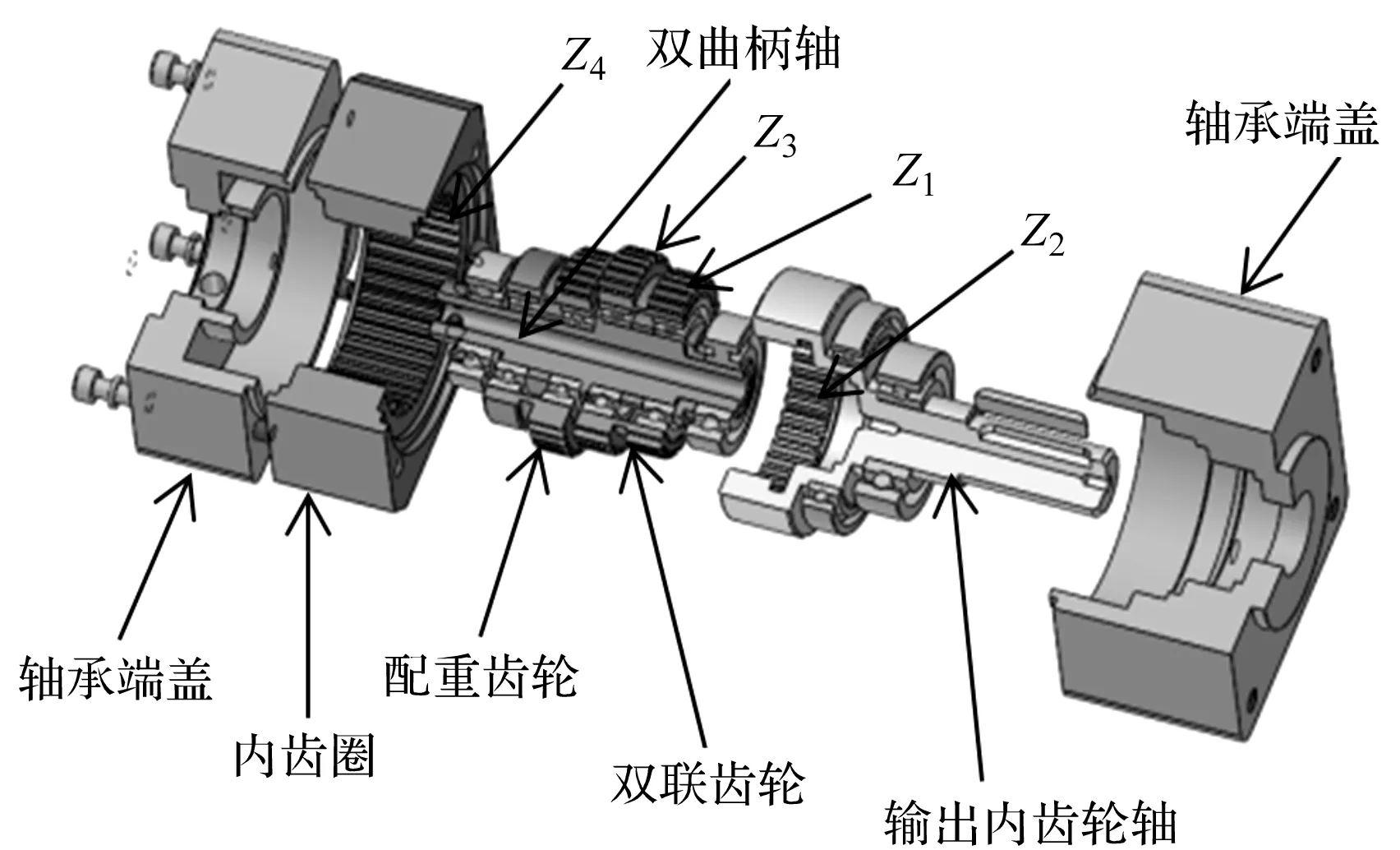
图2 NN型减速器的虚拟样机
图2中,NN型减速器的运动过程为:通过双曲柄轴输入转矩,双曲柄轴通过轴承与双联齿轮连接,双联齿轮z3与内齿圈z4啮合形成行星传动,双联齿轮z1与输出内齿轮轴z2啮合形成另一行星传动,这两对行星传动组合形成NN型行星传动,由输出内齿轮轴输出转矩。
2 实验研究
根据表1,笔者设计制造了4齿差的NN型减速器样机。其中,齿轮材料为40 Cr,减速器采用润滑脂润滑。
减速器的失效形式主要发生在齿轮,为了验证NN型减速器的承载能力,在不同载荷下对样机进行实验,然后拆开减速器观察齿轮的失效情况,主要是观察、分析齿轮的齿面磨损状况[12-14]。
2.1 实验台
减速器载荷实验台主要由电动机、转矩转速仪、减速器、磁粉制动器、磁粉制动器冷却水箱等组成,转矩转速仪和磁粉制动器通过电脑进行调节,如图3所示。

图3 减速器载荷实验台
电动机额定转速3 000 r/min,磁粉制动器的输出最大转矩50 N·m。因为电动机驱动减速器为高速旋转机械,此处必须保证电动机、转矩转速仪、减速器、磁粉制动器的主轴同轴度安装精度。
2.2 实验方案
在减速器载荷实验台上,笔者选择9台样机分别进行承载能力实验。
实验的具体步骤为:
初始载荷10 N·m,以5 N·m的倍数进行加载,每次加载时间为10 min,实验完成后拆开样机,然后观察齿面的磨损情况。
2.3 实验结果
NN型减速器采用两对渐开线少齿数差的内齿轮副行星传动,双联齿轮分别比对应的内齿轮齿数少,双联齿轮承受载荷大;又由于双联齿轮z1比z3齿数少,所以双联齿轮z1承载最大,也是最容易损坏的齿轮。
实验完成后拆开样机,通过观察可见,输出内齿轮和内齿圈的轮齿完好,双联齿轮有磨损情况。
9个样机的齿面磨损实验数据如表2所示。
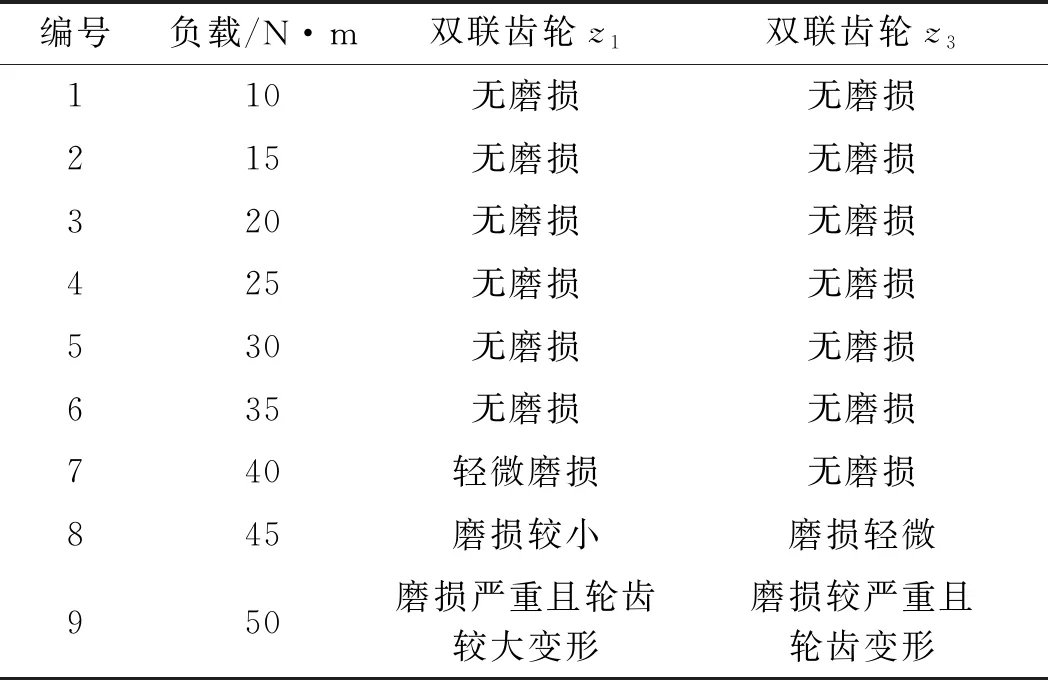
表2 实验数据
结合表2,并通过实验观察可知:在负载为40 N·m时,双联齿轮z1齿面开始磨损;随着负载的增大,双联齿轮z1和z3都开始磨损,且z1比z3的齿面磨损程度更大,双联齿轮每个齿的一端均匀发生磨损和塑性变形。
不同负载下双联齿轮齿面磨损情况如图4所示。

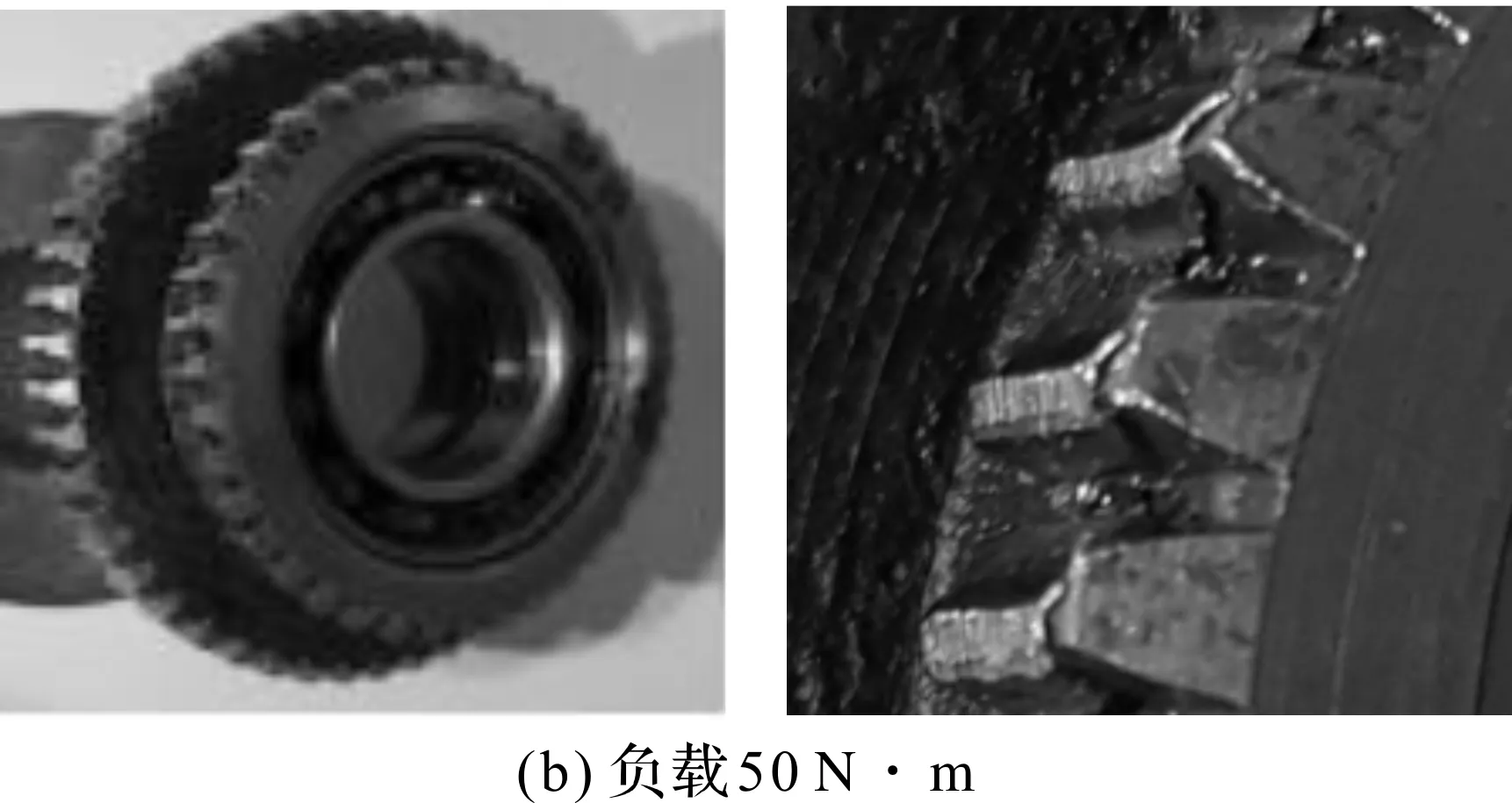
图4 双联齿轮齿面磨损情况
2.4 实验结论
根据国标计算,NN型减速器的额定载荷为20 N·m,其承载能力高于普通减速器。当外部载荷超过40 N·m时,齿轮、齿轮箱、双曲柄轴、轴承等传动部件受到外部载荷综合作用发生弹性形变,导致齿面间的间隙不均衡,引起双联齿轮z1和z3的齿面一端发生严重偏载的情况,且载荷接触斑的位置不在齿面中心。
上述结果显示,双联齿轮z1和z3是磨损和塑性变形的失效形式,但没有产生齿轮折断现象。因此,与过载时齿轮折断相比,NN型减速器显然更加安全、可靠。
3 齿轮修形
为了提高齿轮承载能力和传动可靠性,在设定输入转速3 000 r/min、输出载荷为50 N·m的工况下,笔者采用Romax软件进行动态仿真分析,通过齿轮微观几何模块进行齿轮修形,以改善齿轮的齿面接触斑位置,使其最大齿面载荷位置居于齿面中心,这样在齿面啮合时可以增大其承载接触面积[15-17]。
3.1 修形前齿轮承载能力分析
在采用Romax软件对NN型减速器进行齿面接触载荷分析时,因双联齿轮z1承载最大,最容易发生损坏。因此,此处以双联齿轮z1为例,并且修形前在设定工况下进行动态接触仿真分析,最大单位长度齿面接触载荷是422 N/m,载荷集中于齿面一端;且齿面最大单位长度载荷远高于另一端,与实验结果相同。
修形前齿轮传动线性误差图,即单位长度齿面接触载荷如图5所示。

图5 修形前单位长度齿面载荷云图
减速器的传动精度反映其主要性能,是减速器的核心指标之一。齿轮的偏载现象会导致齿轮传动的精度降低,因此,齿轮修形不仅要改善其承载能力,还要提高齿轮的传动精度。
基于以上分析,笔者对双联齿轮z1的齿轮传动线性误差进行虚拟仿真分析。
随着轮齿滚动角的变化,啮合位移量的变化在7.74 μm~15.68 μm之间,传动误差峰值为7.94 μm,修形前齿轮传动线性误差图如图6所示。
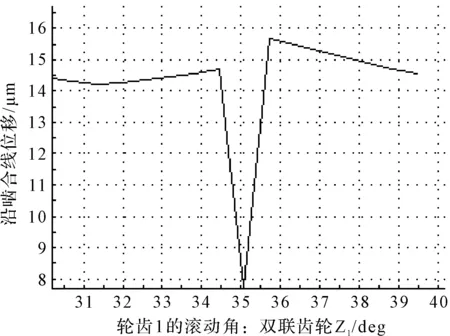
图6 修形前齿轮传动线性误差图
3.2 修形方法
通过承载实验、接触斑和齿面单位长度载荷云图分析,笔者以双联齿轮z1为例进行修形。同时,考虑到齿轮单位长度最大载荷集中在齿轮一端,因此,此处需在齿向和齿廓两个方向分别进行修形。
按照Romax软件的规定可知:沿着齿宽方向去除材料越来越少直到为0,则齿向斜度符号为正,反之为负;沿着齿廓方向到齿根位置去除材料越来越多,齿顶不变,则齿廓斜度符号为正,反之为负。
Romax软件的齿轮微观几何修形是共轭的,因此,齿轮修形设定在齿轮副的某一个齿轮时,则对应的另外一个齿轮会自动进行相应修形[18]。
结合接触斑和单位长度齿面载荷云图的分析可知,齿轮修形大概范围为:
齿向斜度0 μm~10 μm,齿向鼓形0 μm~20 μm,齿廓斜度-10 μm~0 μm,齿廓鼓形0 μm~20 μm。
笔者首先进行齿向修形,把齿面最大单位长度载荷位置移动到齿向中心位置;然后进行齿廓方向的修形,把齿面最大单位长度载荷位置移动到齿廓中心位置。
经过优化确定的修形参数如表3所示。

表3 修形参数
笔者根据表3的修改参数进行齿轮的具体修形。双联齿轮z1齿向的修形曲线如图7所示。
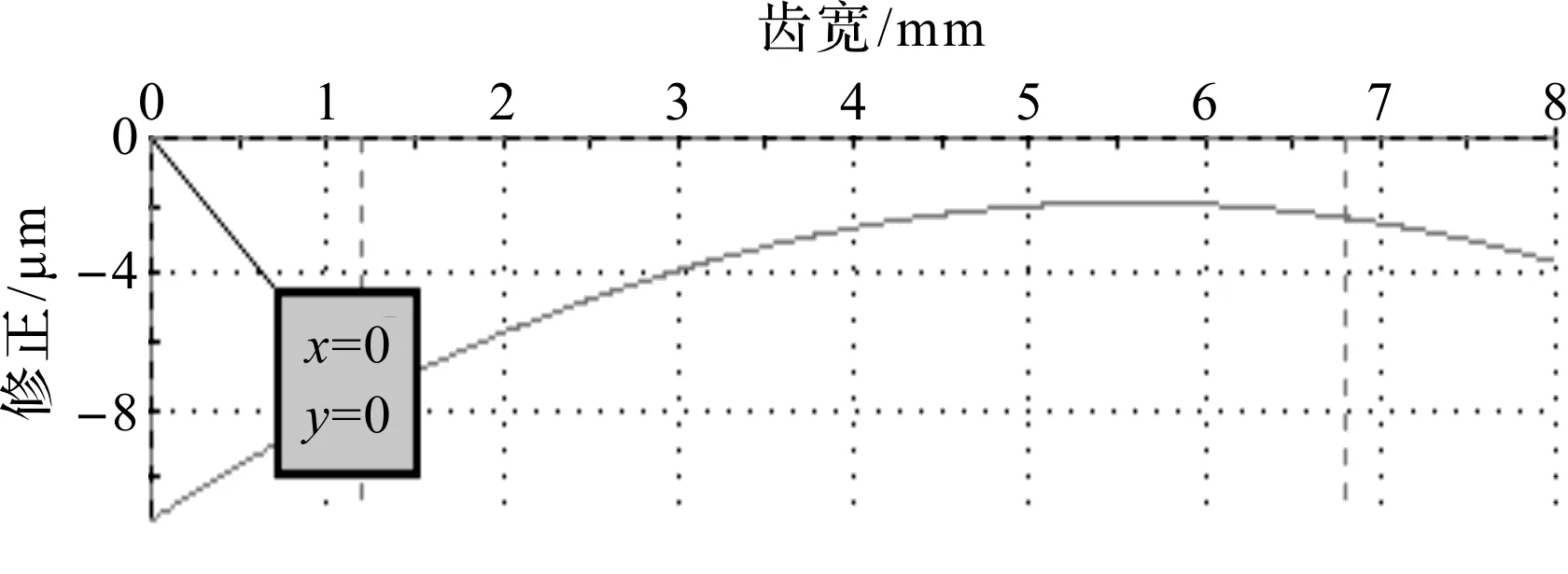
图7 齿向修形曲线
齿轮齿廓的修形曲线如图8所示。

图8 齿廓修形曲线
最终生成的修形齿面如图9所示。
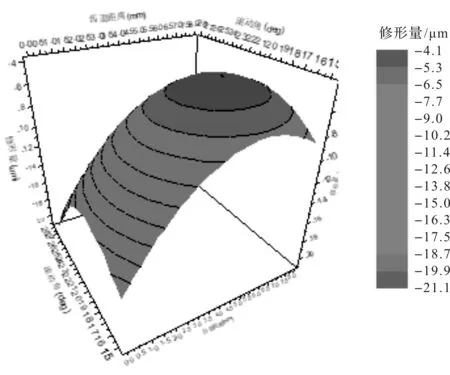
图9 修形齿面
3.3 修形后齿轮承载能力分析
齿面修形后,在设定工况下,笔者对双联齿轮z1运行动态接触仿真分析。接触斑左右对称,齿面单位长度最大载荷是370 N/m,位于齿面中心。齿面单位长度载荷云图如图10所示。
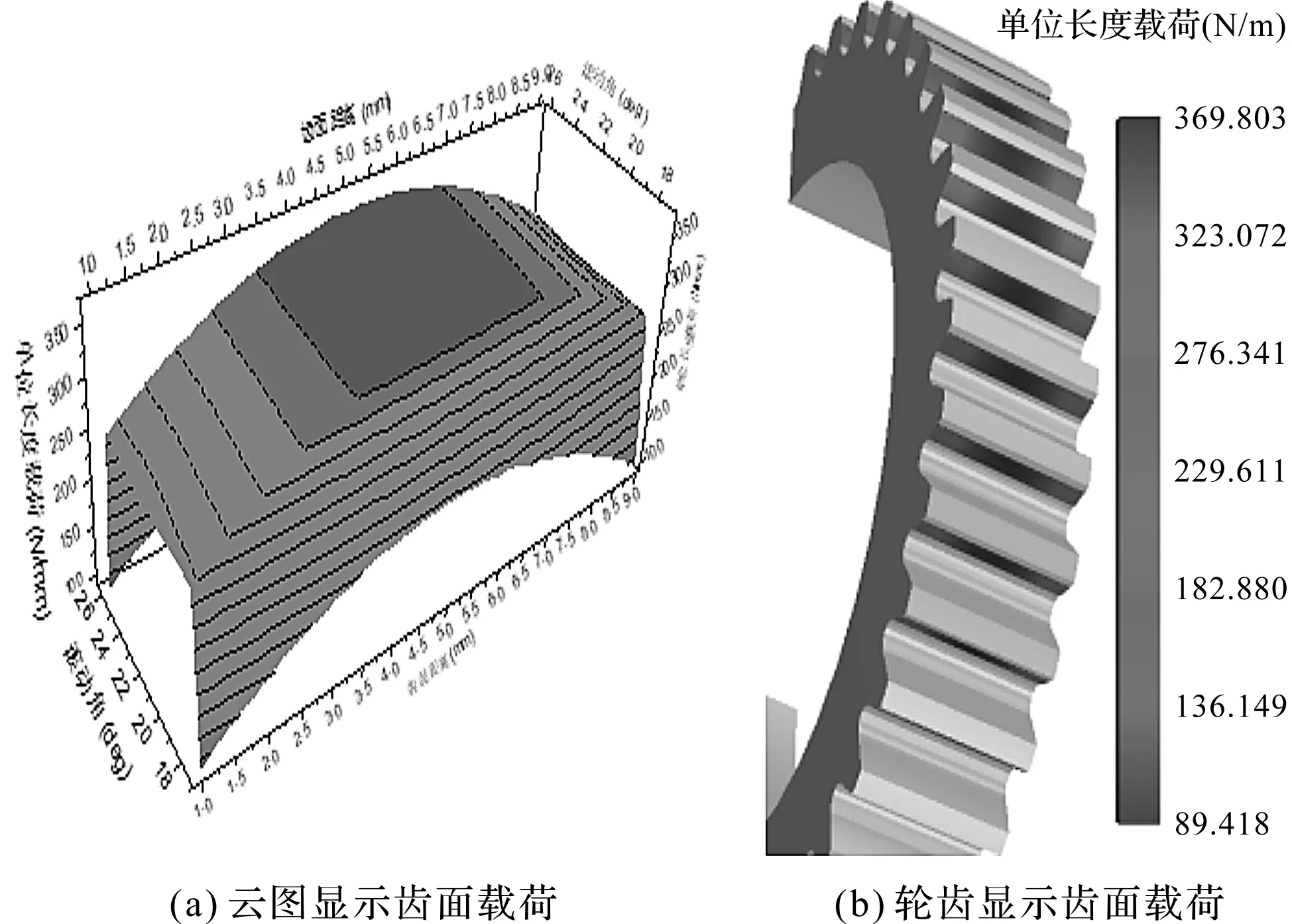
图10 修形后单位长度齿面载荷云图
随着轮齿滚动角变化,啮合位移量在17.13 μm~23.96 μm之间变化,传动误差峰值为6.84 μm。
4 修形后实验研究
根据齿面修形参数,笔者再次制造了NN型减速器样机,并且在减速器载荷实验台上进行了样机实验。当样机的承载能力达到极限输出转矩50 N·m时,在此状态下使其持续工作10 min。
减速器样机实验完成后,笔者拆开实验样机发现,内齿圈、输出内齿轮和双联齿轮的齿面完好,达到了预期的效果。
5 结束语
笔者采用基于Romax软件的齿轮修形微观几何模块,对NN型减速器的齿轮传动系统进行了动态虚拟仿真分析,并在减速器载荷实验台上进行了实验。
研究结果表明:
(1)齿轮修形改善了齿轮承载情况,齿面单位长度最大载荷从422 N/m减小到370 N/m,减小了12.3%,齿面单位长度最大载荷居于齿面中心,提高了齿轮传动精度,线性误差从7.94 μm减小到6.84 μm,减小了7.08%;
(2)在相同的实验条件下,齿轮修形后齿面接触斑位置居于齿面中心,齿面无磨损,改善了齿面载荷分布情况,降低了齿面的载荷,提高了减速器的承载能力;
(3)实验验证了基于Romax软件的齿轮修形方法对NN型减速器进行承载能力研究是可行的。
目前,没有发现与NN型减速器的传动效率、传动精度等参数相关的实验研究,笔者下一步将开展对NN型减速器其他性能参数的实验研究,为生产实践服务。
猜你喜欢
北京信息科技大学学报(自然科学版)(2022年6期)2023-01-12
湖北农机化(2020年21期)2021-01-11
机电工程(2020年1期)2020-03-04
组合机床与自动化加工技术(2018年11期)2018-12-05
舰船科学技术(2018年1期)2018-01-31
制造技术与机床(2017年11期)2017-12-18
重型机械(2017年5期)2017-10-23
制造技术与机床(2017年3期)2017-06-23
中央社会主义学院学报(2017年1期)2017-04-16
新疆钢铁(2015年3期)2015-11-08
