一种小型固定翼无人机弹射系统的设计
2021-06-18 06:16李国利王瀚胡晓航钟艳
机械工程师 2021年6期
李国利, 王瀚, 胡晓航, 钟艳
(哈尔滨理工大学,哈尔滨150080)
0 引言
在科学技术不断进步的今天,无人机的应用可谓前景大好,不论在军事还是民用领域,无人机都发挥着极其重要的作用。文献[1]指出固定翼无人机凭借其较快的速度在侦察、探索等方面有很广泛的应用。但由于其起飞滑跑[2]时对场地要求比较高,对于一些没有起飞条件的情况(如灾后救援、体育赛事、演唱会等)将无法发挥作用,限制了其在更广泛领域的应用。文献[3]指出在民用无人机领域,多旋翼固定翼在航拍方面的应用是极为广泛的,其原因之一就是起飞时几乎不受地面情况的限制。但是多旋翼无人机存在着续航时间短、飞行速度慢等多种问题,对一些大范围的运动及侦察有着天生的弊端。
固定翼无人机有着相对持久的续航时间与很快的巡航速度,而需要一种简单弹射装置可以使其能够在复杂地面状况下起飞,以实现其在更广泛领域方面的应用,解决旋翼类无人机在某些领域的弊端。文献[4]列举了3种无人机弹射起飞的方式,分别为橡筋弹射、电动机直接弹射、液压气压弹射,并分析了这几种弹射方式中各自的优劣点。文献[5]、文献[6]分别对液压与电动机弹射进行了相关研究,但是成本较高,不适用于一般场合的应用。本文通过MATLAB[7]对发射进行参数化研究并使用SoildWorks[8]设计出一种成本低、质量轻的固定翼弹射系统,以拓展固定翼在侦察、救援、航拍等领域的应用。
1 弹射系统的工作原理
1.1 设计要求
为了在保证操作的简便性的基础上实现低成本的发射,本文设计的固定翼弹射平台采用拉簧作为直接弹射动力的方式。
本文所设计的固定翼弹射系统适用于绝大部分类型的小型固定翼无人机,由于要在地面情况复杂的条件下使用,弹射平台的占地面积要小。此外所设计的弹射装置的使用要简单,方便无人机的装填并适用于多个无人机的连续发射。
1.2 工作原理
图1为弹射系统的系统框图,弹射系统可以分为三大部分:由接触腹板和定位侧板组成的无人机限位滑道;由定滑轮、钢丝和拉簧组成的弹射动力装置;由光轴支座、光轴、直线轴承、连接板、活动牵引钩、导向臂、导向块、丝杠、丝杆螺母、联轴器、电动机组成的弹射复位装置。
图2为固定翼弹射系统的三维原理图,图3为俯视图。在本文所设计的弹射平台中,拉簧与钢丝相连,并通过前端的定滑轮实现提供牵引力的拉簧变向,以便在保证发射行程不变的基础上减小整个发射平台的长度。初始位置时,拉簧由于长度原因被稍微拉紧,钢丝到达其位置的最前面时被缓冲块挡住。

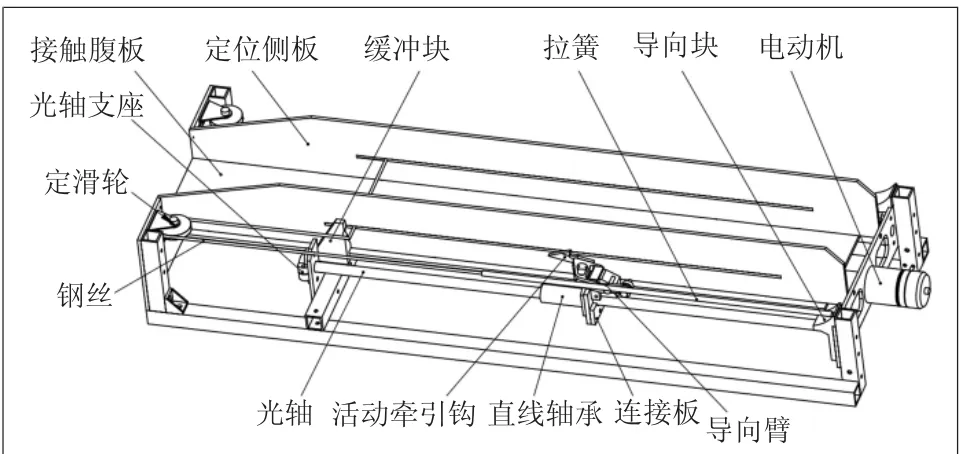
图2 弹射系统三维原理图
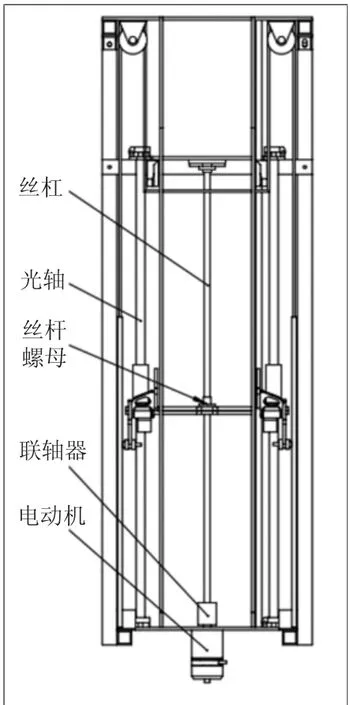
图3 弹射系统俯视图
在使用时,首先将整个平台以相对于地面一定角度放置(一般为25°~45°之间),在限位滑道前端放入一枚无人机,电动机驱动连接板带动活动牵引钩向前运动直到接触到钢丝。活动牵引钩与其相连接的方式为铰链连接,且在其前端有一定坡度,因而当活动牵引钩接触到钢丝并继续向前运动一小段距离时,钩子被有预张紧力的钢丝下压并最终勾到钢丝。完成这一动作后,电动机反转通过连接板和活动牵引钩向后拉动钢丝,同时拉簧的活动端向前运动实现拉簧的蓄力;当整个钢丝牵引机构运动到后端时,导向臂端部安装的轴承接触导向块进而向上带动导向臂,而由于活动牵引钩与导向臂分别在连接铰链的两端,所以活动牵引钩向下运动,从而释放钢丝。此时钢丝受到拉簧的力远大于无人机的重力及无人机与腹板的摩擦力,所以钢丝会从后方带动无人机以很大的加速度向前运动,当无人机以较大的速度运动到滑道末端时,钢丝会被缓冲块挡下,而无人机起飞升空。此时固定翼平台恢复初始位置,完成一个发射周期。
2 技术参数计算
2.1 拉簧参数的确定
小型固定翼无人机的质量一般在2 kg以下,起飞速度在20 m/s以下,以此标准作为弹射平台的设计基础。首先计算固定翼无人机达到起飞速度所需要的能量:

式中:M为无人机质量;V为起飞速度。
根据发射的工作原理,需要有两个滑轮做导向,所以滑轮外圈的线速度等于钢丝移动速度(20 m/s)。滑轮为钢制、不可忽略质量,为了方便计算可将滑轮简化为半径、质量不变的圆柱体。
设达到相应速度所需能量为:

式中:J为滑轮的转动惯量;ω为滑轮的角速度;m为滑轮的质量;r为滑轮半径。
设W为拉簧所提供发射的能量:

式中:K为拉簧的进度系数;X为发射行程。
钢绳较轻,所消耗的能量忽略不记。
固定翼无人机发射过程中与发射系统之间的摩擦不可忽略。设能量传递效率为0.90,实际发射倾角为43°左右,方便计算按45°,则发射一枚固定翼无人机所需要的总能量应与拉簧所提供的能量相同,即:

解得行程X与劲度系数的函数表达式为

发射最大作用力与发射行程的函数表达式为

利用MATLAB绘出拉簧劲度系数K、最大作用力F与发射行程X之间关系的图像,如图4所示。通过分析图像可知,当发射行程大于0.6 m时,拉簧的劲度系数K明显下降。

图4 K与F函数图像
劲度系数的下降对整个发射平台的设计都是很有利的:1)减小拉簧在发射过程中对发射平台的作用力;2)更容易选到合适的拉簧,避免定制而需要较高的费用。而由于设计需求为小型发射平台,发射行程X不宜过大。
通过最大受力图像与劲度系数图像综合得出:发射行程X在0.9~1.2之间较为合适,选用X=1.1 m。拉簧劲度系数K=766.24 N/m,最大作用力F=842.83 N。而由于拉簧的放置为左右两根,所以单根拉簧的劲度系数与最大拉力为总的一半。
2.2 电动机参数的确定
由2.1节分析了弹射时最大作用力为842.83 N,这个力由电动机旋转通过联轴器与丝杆带动丝杆螺母提供,下一步是计算电动机的功率和转矩。
丝杆的型号为T8,导程为12 mm,即丝杆最大直径为8 mm,丝杆旋转一周,丝杆螺母运动12 mm。按一般工况螺旋传动的效率为0.8,由能量公式:

式中:V为螺母运动速度;L为导程;n为电动机转速;μ为传动效率;T为电动机转矩;P为有效功率。
得出:T=2.01 N·m。
为了快速完成无人机的发射,要求在10 s之内完成拉簧的蓄力,则转速为

式中:t为蓄力时间。
得到电动机的功率为

最终确定电动机的转矩不小于2.01 N·m,电动机功率不小于115.9 W。
3 核心构件的强度校核与刚度校核
首先将模型在SoildWorks中建立出来,并利用其中的Simulation对受力情况复杂及对刚度有特别要求的构件进行有限元分析,从而校核其强度、刚度是否满足需求。有限元分析是把所计算构件划分为很多细小的网格,并针对网格里的每一个小单元进行计算。与以往的计算方法及实验法相比,这种方式极大提高了结果的准确性,并降低了得出结论所花费的时间和成本。
3.1 活动牵引钩强度分析
活动牵引钩用于牵引钢丝,由于其工作特点受到钢丝垂直于牵引钩所在平面的力及平行牵引钩平面向前的力,两个力大小相同,为最大作用力F=842.83 N。牵引钩的材料为304不锈钢。
由图5可知,牵引钩的最大应力小于这种材料的许用应力,因此得出结论:由这种材料制成的钩子满足使用要求。
3.2 活动牵引钩的刚度分析
与上述强度分析时受力状况与材料相同,由图6可以看出,最大位移为0.2 mm,大于牵引钩相对于限位侧板的间隙预留量1 mm。因此得出结论:变形不会导致机构运动过程中的干涉,且满足刚度要求。
3.3 连接板的刚度校核
连接板用于连接牵引钩与丝杆螺母,由于牵引钩与丝杆螺母作用力不共线,因而连接板会发生扭转变形,而扭转变形量过大会导致丝杆螺母与丝杆之间产生弯矩,降低丝杆传动的效率,所以要检验其刚度是否满足设计要求,材料依旧选用304不锈钢。
连接板的变形量如图7所示,最大变形量为0.02 mm,几乎是同水平面上的变形,扭转量很小,因此连接板刚度满足要求。
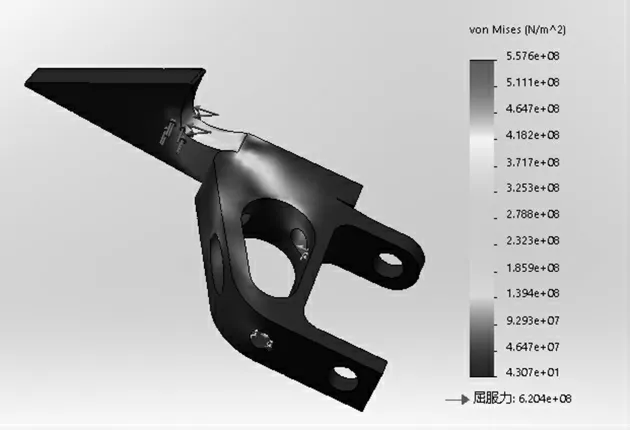
图5 牵引钩应力云图

图6 牵引钩应变位移云图

图7 连接板应变位移云图
4 结论
本文提出了一种基于拉簧动力的固定翼无人机发射系统,该系统具有占地面积小、质量轻、发射成本低、对无人机的适用性好等优点,可适用于大多数小型固定翼无人机在无滑跑起飞条件下的应用。并利用MATLAB、SoildWorks对关键参数进行计算与仿真,保证该系统设计的合理性。本文提出的固定翼无人机发射平台将固定翼无人机起飞的方式由长距离的滑跑起飞变为超短距离的弹道发射,能实现小型固定翼在海面、湖泊等大范围的水域内的起飞与侦察,极大提高了对水域侦察的经济性与便捷性;可以将具有长距离巡航的固定翼无人机在野外环境平稳发射,对于野外搜救、野生动物调查、森林火险勘察等大范围野外活动有极为重要的意义。
猜你喜欢
铁道车辆(2022年5期)2022-10-31
橡塑技术与装备(2022年10期)2022-10-03
有色金属材料与工程(2021年4期)2021-11-27
北京航空航天大学学报(2021年4期)2021-11-24
理化检验(物理分册)(2021年10期)2021-10-27
电子制作(2019年7期)2019-04-25
陕西理工大学学报(自然科学版)(2018年5期)2018-11-06
汽车零部件(2017年8期)2017-12-18
航空模型(2016年10期)2017-05-09
舰船科学技术(2016年1期)2016-02-27