
含有对称间隙的2自由度振动系统电路仿真
2021-06-16 02:14常逢亮汪诤胡国静
噪声与振动控制 2021年3期
常逢亮,汪诤,胡国静
(兰州交通大学 机电工程学院,兰州 730070)
非光滑机械系统具有复杂的动力学特性,其非线性特性由分段线性、间隙、干摩擦和时滞等非线性因素引起。对于含有间隙的分段线性机械振动系统,当振子在间歇内运动时为线性系统,而一旦接触到边界时,系统将出现弹性系数的突变,造成强烈的振动和噪声,促使机械零件加速磨损和冲击,引起的随机性载荷严重影响到机械零件的寿命和可靠性[1-2]。
非线性机械振动的研究是近年来研究的热点,其以理论研究和数值仿真为手段进行分析。数值仿真采用MATLAB、Fortran或C等编程语言实现,通过长时间的计算获得分岔图和相图。由于数值仿真应用了数值迭代求解微分和积分方程,当精度要求很高时,计算需要花费漫长的时间和巨大的计算量[3]。为了能够快速完成计算过程,研究者通常对算法进行优化,提高数值计算的效率,或采用昂贵的高性能计算机,以期缩短计算时长。
本论文建立了2自由度线性系统的传递函数,确定了非线性特征发生的频率范围。以Multisim为仿真软件,设计了与数学模型完全等效的电子电路模型,该等效电路模型仅由几个TL074CN运算放大器和电阻电容组成,通过仿真得到非线性动力学中相图,不仅极大地降低了对于算法和编程能力的要求,而且电路图具有能直观表达方程式的优点,同时Multisim具有运行时间短和调整参数简便的优点。
1 对称间隙的2自由度振动系统模型
1.1 动力学模型和数值仿真
典型的含有对称间隙2自由度振动系统的动力学模型如图1所示,质量M2通过线性弹簧K2和线性阻尼C2与机架连接,并且在简谐激励P2sin(ωt+τ)的作用下运动。质量M1通过线性弹簧K1和线性阻尼C1与质量M2连接,在距离质量M1零点(M1和M2在受力为0的平衡点)B的两端有线性弹簧K0。设在静态情况下M1和M2所在位置为x1和x2。当质量M1的位移小于对称间隙B时,M1和M2为一个2自由度线性振动系统,当质量M1的位移大于+B或-B时,其与线性弹簧K0接触并发生作用,此时M1受到分段线性弹簧力的作用,并且产生非线性运动。

图1 动力学模型
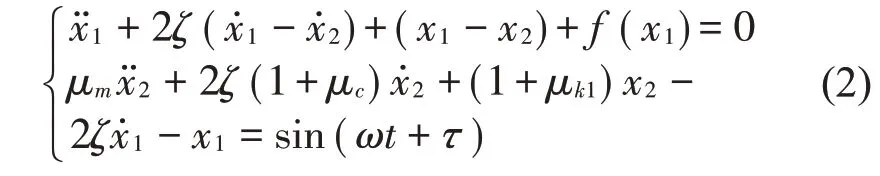
根据动力学理论,可以建立质量M1和M2的物理方程:

式中非线性部分为

式(1)为物理方程,其每个因子均含有量纲,为了分析方便,将式(1)转换为无量纲方程,取无量纲化参数为
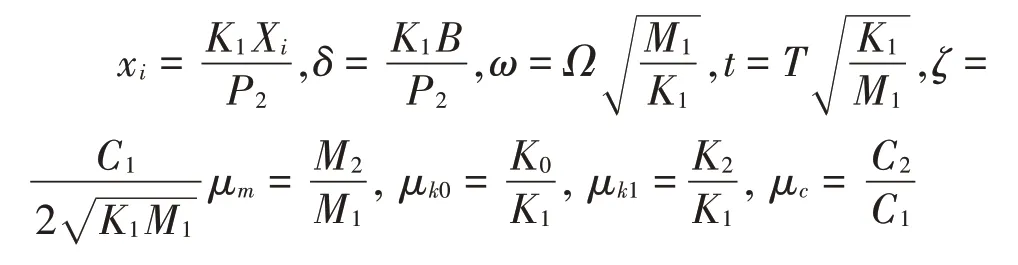
则可得到方程的无量纲化形式,即数学方程为
非线性部分为

式(2)中的系数有5个,随着变量ω的变化,系统的运动特性将呈现复杂的运动特征。选取μm=μc=μk1=1,μk0=25,ζ=0.2,δ=0.2,首先确定质量M1与线性弹簧K0不发生接触的频率范围。此时,系统为一个线性系统,将式(2)中的非线性项去掉,即可得到线性方程为

根据动力学模型,对于质量M1,输入可以认为是X2,输出为X1;对于质量M2,输入为激励信号sin(ωt+τ),输出为X2;而整个系统的输入为激励信号sin(ωt+τ),输出为X1,建立式(3)的第一个方程的传递函数,有:

则:

建立式(3)的第二个方程的传递函数,有:

则:

以系统激励信号为输入信号,输出为X1(s),则系统的传递函数为

则:

将μm=μc=μk1=1,μk0=25,ζ=0.2,δ=0.2代入式(6)中可以得到:

在Simulink中绘制系统的伯德图,如图2所示。可以看出,系统在频率为1.9附近增益为0.2(纵坐标最小值设为0.2),随后继续下降,因此,系统只有在频率低于1.9时才可能与线性弹簧K0发生接触碰撞。图中横坐标为频率,纵坐标为增益。
1.2 分岔图和相图
根据上述分析,并根据图2和式(7),可知当μm=μc=μk1=1,μk0=25,ζ=0.2,δ=0.2时,系统中质量M1仅在激振频率小于1.9时才会与线性弹簧K0发生接触并碰撞,系统进入非线性运行范围,而在频率高于1.9时,系统整体呈现线性状态。将参数代入式(2),令对方程进行状态转换,转换为1阶微分方程,即状态方程为

图2 伯德图
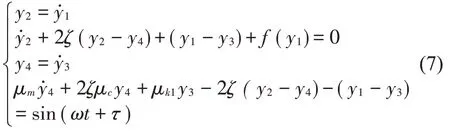
式(7)中非线性部分f(y1)为

根据状态方程式(7),经过编程绘制分岔图,如图3所示。图中横坐标为频率ω,纵坐标均为相对速度y2-y4。
从分岔图3中可以看出,随着频率ω的变化,含有间隙的2自由度振动系统随着激励频率的变化,系统出现了单周期、2周期、4周期和混沌等复杂的非线性运动特征。根据分岔图,选取图3中的1.35、1.395、1.4、1.44,如图4所示。图中横坐标为M1相对M2的位移y1-y3,纵坐标为M1相对M2的速度y2-y4。

图3 分岔图
2 电路仿真
使用等效电路实现振动系统的分析,首先要将振动系统的方程转换成等效的电路方程[4-7],将式(7)转换为积分形式:


图4 相图
非线性部分为

在此选择有源积分电路,将式(8)转换成等效的电路方程即:

非线性部分为

分别选用4个积分模块来实现式(9),其中运算放大器选用TL074CN,电路设计图如图5所示。其中第一个方程由U1A和U1B实现;第二个方程由U2C、U4B和U4C组成;第三个方程由U1C和U1D组成;第四个方程由U3A、U3B、U3C组成,U4A和U2A为反相器,非线性函数由软件提供的NONLINEAR-DEPENDENT模块实现,供电电压选择±18 V,将式(9)转换为2阶微分方程[8-9],则有:

式(10)和式(1)形式上完全相同,为了使两式实现等效,必须确定式(10)中各个参数的数值。根据无量纲化过程选取的参数,即μm=μc=μk1=1,μk0=25,ζ=0.2,δ=0.2.考虑到电阻电容的影响,选取R1=R2=10 kΩ,R10=100 kΩ,C1=C2=C3=C4=22 nf,则得到R4=R7=30 kΩ,R5=R9=30 kΩ,R3=R6=R8=43.3 kΩ,其余电阻仅用于反相电路,所以均取100 kΩ。

图5 电路图
正弦波函数的幅值可由δ=0.2求得:
δ=0.2,即可得Vm=1.067 V
由无量纲化过程,可得出激励频率f和ω之间的关系为

3 Multisim12.0仿真
通过MultiSim12.0对电路模型进行仿真,函数发生器正弦波幅值为1.067 V,选择激励频率分别为563.86 Hz(1.35ω)、582.65 Hz(1.395ω)、584.74 Hz(1.4ω)、601.45 Hz(1.44ω),运行结果如图6所示。示波器中横坐标通道1为位移(y1-y3),刻度为100 mV/Div;纵坐标通道2为速度(y2-y4),刻度为100 mV/Div。

图6 电路仿真相图
相比较于通过编程绘制相图,Multisim12.0绘制的相图和其完全一样。自行编程的运行时间为等效电路仿真的3倍,说明了程序需要进行更进一步的优化,当然更说明了编程对于非线性研究的影响太大,能降低其影响,可以提高研究效率。同时电路仿真还拥有着动态参数可调的优点,利用等效电路分析非线性动力学,降低对编程要求,提高研究的效率。
4 结语
通过对2自由度线性系统建立传递函数,应用bode图分析分段线性系统的碰撞区间,确定分段线性动力学系统发生非线性特性的频率范围,减少数值分析的计算时长。应用Multisim12.0电路仿真软件中的NONLINEAR-DEPENDENT模块及几个TL074CN运算放大器、电阻电容等简单的电路元器件,快速建立与动力学模型等效的电路模型,得到与数值仿真相同的结果。由此可见等效电路可以实现非线性动力学的分析和研究,节省了数值仿真对算法、编程和计算机性能的要求,为非线性动力学研究提供了一种很好的研究方法。
猜你喜欢
电工技术学报(2022年19期)2022-10-14
少先队活动(2021年2期)2021-03-29
中学生数理化(高中版.高考理化)(2021年1期)2021-03-19
汽车维修与保养(2021年8期)2021-02-16
学生天地(2020年17期)2020-08-25
数学大王·低年级(2020年3期)2020-03-12
新高考·高一物理(2016年10期)2017-07-07
文学少年(有声彩绘)(2016年11期)2016-02-28
微特电机(2012年12期)2012-11-22
学周刊(2009年11期)2009-12-15
