
多传感器监测飞机部件非线性退化评估
2021-06-16 01:55薛小锋田晶何树铭冯蕴雯
航空学报 2021年5期
薛小锋,田晶,何树铭,冯蕴雯
西北工业大学 航空学院,西安 710072
飞机部件一般采用多传感器进行状态监控,基于所采集的信号精确描述系统具有退化特性的故障机制存在着较大的困难,因此,可以将数据驱动模型应用于系统退化过程描述,通过参数估计识别退化模型的参数。基于数据驱动的故障预测技术不需要研究对象的精确失效物理模型或先验知识,而是依据状态监测数据来建立设备性能参数的退化过程模型,并进而利用训练得到的退化模型实现故障预测,同时对经验知识的依赖性也较小,工程适用性较好[1]。数据驱动类方法目前已逐步应用到发动机转子[2]、滚动轴承[3]、齿轮箱[4]等装备部件的故障诊断实际中,发展出了多种基于机器学习类算法的诊断方法,常见的有神经网络[5]、支持向量机[6]、贝叶斯网络[7]、自回归滑动平均模型[8]等,该类方法以诊断正确率作为学习目标,并且适用范围广,并完全依赖样本数据。对于多传感器信号的处理,形成了贝叶斯融合[9]、DS证据理论[10]、粗糙集理论[11]等信息融合[12]方法,可对多源信息或来自多个传感器的数据加以综合来降低单源数据不确定性。基于数据的预测方法同样可以分为基于统计的方法和基于机器学习的方法。基于机器学习的预测方法则通过建立状态监测数据与已有寿命数据之间的输入输出函数映射关系来进行预测,这类方法对状态监测数据的要求比较高,在失效数据较少的情况下存在着失效机理难以解释、故障机理不明确等问题。而基于统计的方法通过状态监测数据来建立退化模型,并估计其未知参数,得到剩余寿命的概率密度函数和置信区间,该类方法可以有效地评估寿命预测的不确定性,常见的方法有基于粒子滤波的预测[13]、隐马尔可夫模型和半隐马尔可夫模型[14]等,目前该类方法由于失效机理解释较为清晰、可评估预测不确定性等优点而被广为采纳。
在实际工程中,由于飞机复杂的运行环境、载荷工况的随机性,使得飞机各类部件的剩余寿命(Remaining Useful Lifetime,RUL)也同样具有随机特征。因此,剩余寿命可以认为是随机变量,为从当前时刻到完全失效的时间间隔[15]。由于寿命预测的这种不确定性特征,随机过程模型因可以准确描述失效产生机理和运行环境变化、表征寿命预测的不确定性并对预测的不确定性进行控制而成为故障预测领域的主流方法之一。Wiener过程作为一种能够描述系统状态增加或减小趋势的非单调过程,能够给出剩余寿命的概率密度分布(PDF),被广泛应用于剩余使用寿命预测建模,王浩伟等[16]基于多参数退化进行了随机环境应力冲击下的导弹部件寿命预测,胡昌华和任子强等[17]针对单一传感器数据的发动机剩余寿命预测存在数据利用率低和精度不高的问题,提出了一种融合多传感器数据的复合健康指标模型,进一步考虑时变、随机、测量不确定性的影响建立了用于寿命预测的性能衰减模型[18]。Wen等[19]提出一种基于多变量Wiener过程和两阶段经验的退化预测流程,并且可以实现故障预测的在线更新。Dong等[20]研究指出同时考虑时变、个体、测量不确定可以有效地提高剩余寿命预测的精度,利用粒子滤波实现了对锂电池的剩余寿命预测。
目前,中国民机、卫星等各类复杂装备在工程实际中已产生了大量多源运行数据,这些数据对于装备故障诊断预测、维修工程分析及运行支持等方面具有非常重要的支撑作用,但现阶段对于这些运行数据的利用还不是很充分,因此本文基于Wiener理论对具有非线性退化特征的多传感器监控的部件运行数据进行退化建模,推导出部件剩余使用寿命的分布,随后利用状态空间模型进行隐退化状态估计并同时利用最大期望算法(Expectation Maximization,EM)实现参数递推估计,探索解决具有非线性退化特征的部件剩余寿命预测问题,并以民机发动机部件实时监测数据进行验证研究,为飞机及其部件的剩余使用寿命预测提供参考,进而为飞机的视情维护决策提供技术支撑。
1 部件性能参数的非线性退化过程
Wiener 过程本质是由标准Brownian运动驱动的扩散运动,通常可用于刻画由大量随机微小损伤而导致系统性能退化的非线性退化过程。实际工程中,一般可将飞机部件性能参数的非线性退化特征转换为线性退化过程(比如对数变换),再结合Wiener过程进行求解[21],然而此类转换大多会带来预测精度的下降,因此如何采用Wiener过程来研究更为普遍的非线性退化更具工程价值。一般对于随使用时间退化的性能参数的非线性退化过程有如下描述:

(1)

(2)

2 基于非线性Wiener过程的剩余寿命模型
记φ为性能参数阈值,首达时间(即寿命)为T=inf{t:X(t)≥φ|X(0)<φ},则其概率密度函数为fT|θ(t|θ),可靠性函数为RT|θ(t|θ),对于当前时刻tk,剩余寿命Lk的概率密度函数可以表示为
fLk|θ(t|θ)=fT|θ(t|θ)/RT|θ(tk)
(3)

fT|θ(t|θ)=
(4)


(5)
本文主要研究φ(t;θ)=ηbtb-1的退化过程,则根据式(2),相应的退化轨迹和测量过程可表示为
(6)
1)部件剩余寿命RULk的PDF
(7)

2)部件剩余寿命RULk的CDF
(8)
3)部件剩余寿命RULk的数学期望
(9)

(10)
i=1,2,…,N
(11)
3 寿命模型参数估计

在时刻tk,参数集θ在第l步的EM迭代可以表示为
(12)
3.1 对数似然函数的期望计算
定义E-step对数似然函数的期望为
(13)
由贝叶斯规则,
(14)
从而,
(15)
根据式(6)的假设:
(16)

同理,有
(17)
因此,式(13)中E-step的数学期望可以写为


(18)
3.2 对数似然函数的最大值计算
式(19)可用于实现参数的迭代估计

(19)
(20)
(21)
(23)
对于参数,则通过求解如下非线性方程可以得到。
(24)
通过式(20)~式(24)进行迭代来更新待估参数,直至各参数的精度达到要求值,即完成了第k步退化状态估计的参数估计。
4 案例研究
4.1 数值仿真案例
为了验证所提方法的有效性,采用式(2)中非线性函数退化为常数的线性特例,即φ(τ;θ)=η时所描述的线性退化模型进行数值模拟仿真:
(25)


图1 仿真数据(2个传感器)
图2 真实退化状态和估计退化状态对比
图3为各参数估计的迭代情况,表明采用EM算法进行参数估计是收敛的,经过前期的一段波动以后,各参数的估计结果均收敛到真值附近,这意味着要实现较高精度的参数估计需要一定数量以上的监测样本点数据来支持。为了说明预测精度的收敛性指标,定义第k个监测点处的预测均方误差为

图3 基于EM算法的参数估计结果
(26)
从图4中可以看出经过初期的振荡达到最大均方误差后,利用Wiener退化模型进行剩余寿命估计的方法是收敛的,随着监测样本点的增加,所预测寿命的MSE不断减小。因此,可根据实际情况对于均方误差的接受程度来选择最小监测样本点的数量。
图4 MSE随监测样本点变化曲线
4.2 民航发动机退化建模及剩余寿命预测案例
本节将所提出的RUL评估方法应用于NASA的涡扇发动机剩余寿命预测问题[26],用来验证所提方法对于具有非线性退化特征的寿命预测问题的有效性。其数据集包含NASA开发的商用模块化航空推进系统(C-MAPSS)记录产生的数据,由21个参数的多变量时间序列数据组成,如表1所示。每个发动机单元都以不同程度的初始磨损和参数分散性开始退化过程,直到它们到达系统失效阈值,即最后时刻的监测数据对应于发动机单元被宣布为失效的时间周期作为发动机单元的寿命。
本文采用了C-MAPSS 的24个发动机单元的监测数据,HPC出口静压(Ps30)部分数据如图5所示,红色圆圈标记的数据表示发动机单元的最后一个飞行循环,即达到失效阈值。

图5 C-MAPSS部分监测数据

表2 线性与非线性退化模型的参数估计结果
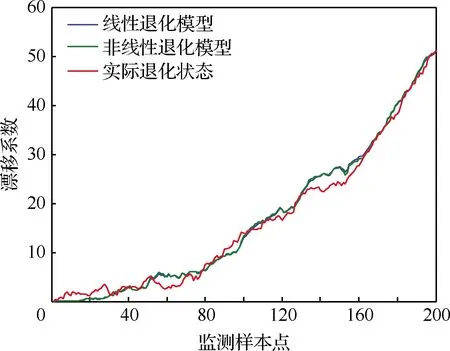
图6 2种方法进行退化状态估计对比
图7给出了采用线性退化模型和非线性退化模型进行参数估计的剩余寿命预测的概率密度函数对比,通过比较图7(c)与图7(a)可以看出非线性退化模型相比线性退化模型的PDF更为集中,表明寿命预测的不确定性更小,同时图7(c)也比图7(b)具有更集中的PDF,说明传感器监测数据类型的增加也可以很好地降低寿命预测不确定性,达到多传感器信息融合的目的,这在实际工程应用中是具有显著意义的,因为剩余寿命预测不确定性的降低可以显著提高维修决策结果的置信度,有效降低决策风险。进一步地,图8为剩余寿命预测估计均值与实际寿命曲线的对比,比较图8(c)和图8(a)可以发现本文所采用的剩余寿命预测方法与真实剩余寿命曲线的拟合度要明显优于线性退化模型,采用传统的线性退化模型进行寿命预测会导致明显的预测偏差,采用线性退化模型来分析发动机单元的剩余寿命是不合适的,而本文采用的非线性退化模型具有良好的剩余寿命预测跟踪性,而本文采用的非线性退化模型具有良好的剩余寿命预测跟踪性能,且与图8(b)相比也可以明显看出,多传感器监测数据融合相比单一传感器监测数据下的预测与实际剩余寿命的偏差相对更小一些,这也表明多传感器信息融合可以带来剩余寿命预测精度的提高,各方法相对误差对比如表3所示,本文方法相对误差最小,最大相对误差为8.06%。同时也给出了本文方法预测的寿命其置信度为95%的上下限,如图9所示,可为合理使用寿命估计结果提供依据。

图7 不同退化建模策略下RUL预测PDF对比

图8 不同退化建模策略下RUL预测结果对比

表3 RUL预测误差对比
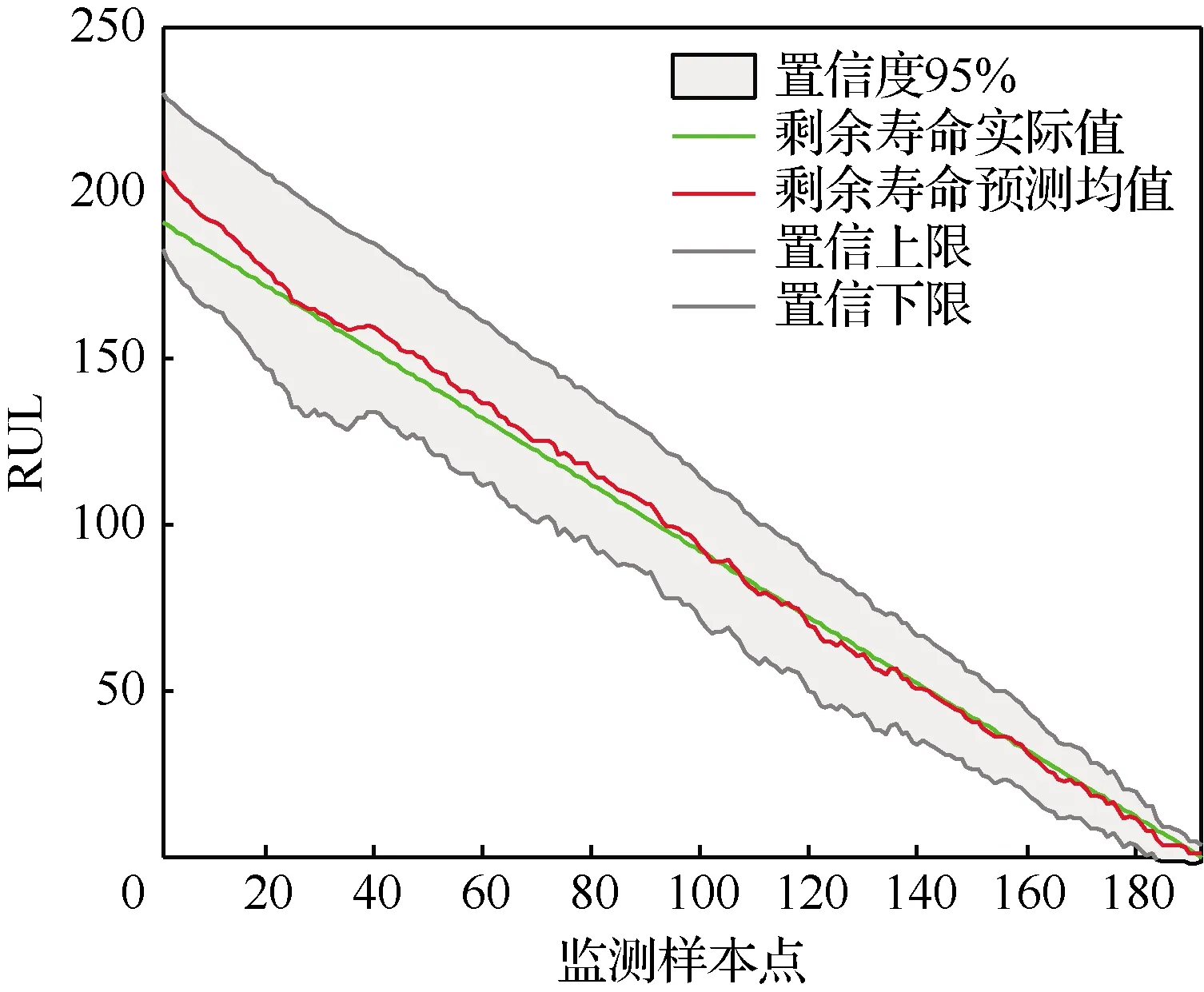
图9 本文方法得到的RUL预测均值及其置信度为95%的上下限(M2)
5 结 论
本文研究了考虑性能参数退化过程具有非线性特征的民机典型部件剩余寿命(RUL)的评估问题,主要结论如下:
1)建立了基于多传感器监测数据的非线性Wiener退化过程的剩余寿命预测框架,采用EM算法实现非线性退化模型参数估计。本文目前只是着重于方法的推导,在算例中对退化参数及其函数进行了比较理想化的设定。在工程实际寿命预测问题上,基于Wiener过程进行寿命预测建模时,这些因素仍需针对具体领域来确定的,也都是寿命预测领域需继续开展的研究工作。
2)数值仿真案例表明所采用的状态估计和参数估计方法能够迭代地收敛到真值附近,且退状态估计能够准确地对系统真实退化轨迹进行跟踪;发动机剩余寿命预测案例结果表明本文所提方法能够很好地估计具有非线性退化过程的系统的剩余使用寿命,与实际结果的拟合度最好,且传感器数量的增加可以有效降低预测的不确定性。
3)民航发动机性能参数退化机理复杂,采用本文方法依据运营过程中已监测的参数数据建立其非线性退化演化模型,并进而进行剩余寿命预测,对于提高民用飞机发动机可靠性与安全性有着显著的工程价值。
猜你喜欢
消费电子(2021年7期)2021-08-10
汽车维修与保养(2020年11期)2020-06-09
科学与财富(2020年6期)2020-05-19
小学语文教学·会刊(2019年2期)2019-09-10
文教资料(2017年15期)2017-09-18
计算机应用(2016年10期)2017-05-12
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
时代金融(2017年6期)2017-03-25
科技与创新(2016年4期)2016-03-16
