
永磁同步电机双闭环控制系统仿真
2021-06-15 05:38乔景慧王立强
河南科技 2021年5期
关键词:永磁同步电机
乔景慧?王立强

摘 要:本文对永磁同步电机(PMSM)的双闭环控制系统进行了分析。采用矢量控制方式,通过坐标变换来对磁链和转矩进行解耦,形成以转子磁链定向的两相参考坐标系,模拟直流电机的控制方法。结合永磁同步电机矢量控制模型对电流与速度环调节器进行参数整定,并在MATLAB/Simulink中进行仿真分析。仿真结果证明了永磁同步电机矢量控制系统和控制算法的正确性。
关键词:永磁同步电机;矢量控制;双闭环;参数整定
中图分类号:TM341文献标识码:A文章编号:1003-5168(2021)05-0044-04
Abstract: The double closed-loop control system for permanent magnet synchronous motor (PMSM) were analyzed. The vector control method was adopted, and the flux linkage and torque were decoupled by coordinate transformation, and a two-phase reference coordinate system oriented by rotor flux linkage was formed for simulation the control method of DC motor. Combined with vector control model of permanent magnet synchronous motor, the parameters of current and speed loop regulator were adjusted and simulated in MATLAB/Simulink. Simulation results showed that the correctness of vector control system and control algorithm of permanent magnet synchronous motor.
Keywords: permanent magnet synchronous motor;vector control;double closed loop;parameter tuning
隨着电子技术、电机控制技术的快速发展,交流永磁同步电机的应用越来越广泛。因此,分析与研究永磁同步电机的控制方法十分重要。胡晓伟等对永磁同步电机矢量控制方案在航空领域的应用进行了研究[1]。孙萍对交流永磁同步电机的电流环进行了优化与研究。但是,都没有涉及双闭环控制协调调整的方法。
本文采用[id=0]的矢量控制方式,分析了永磁同步电机电流环与速度环双闭环控制系统的参数整定方法,并在MATLAB/Simulink仿真环境下进行仿真,验证了方法的有效性与准确性。
1 永磁同步电机的数学模型
1.1 三相静止坐标系下数学模型
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)具有多变量、强耦合的特性。为了简化分析,将三相永磁同步电机视为理想电机,满足下列条件:①忽略铁芯的饱和,不计电机涡流损耗与磁滞损耗;②电机的永磁材料电导率为零,三相定子绕组轴线在空间上120°对称;③电机的永磁材料电导率为零,永磁体内部与空气的磁导率相同;④三相定子绕组产生的感应磁场与定子绕组电流在气隙中产生的磁势均为正弦分布[2]。由此,得到永磁同步电机在三相静止坐标系下的数学模型,如式(1)所示。
其中,[TL]为电机拖动的负载转矩;[f]为摩擦系数;[J]为机械负载折算到电机轴端的转动惯量。因为转子磁链值是恒定不变的,因此,调节PMSM的电磁转矩,仅需要调节永磁同步电机在两相旋转坐标系中的交直轴电流分量[id、iq][4]。
2 永磁同步电机控制策略分析
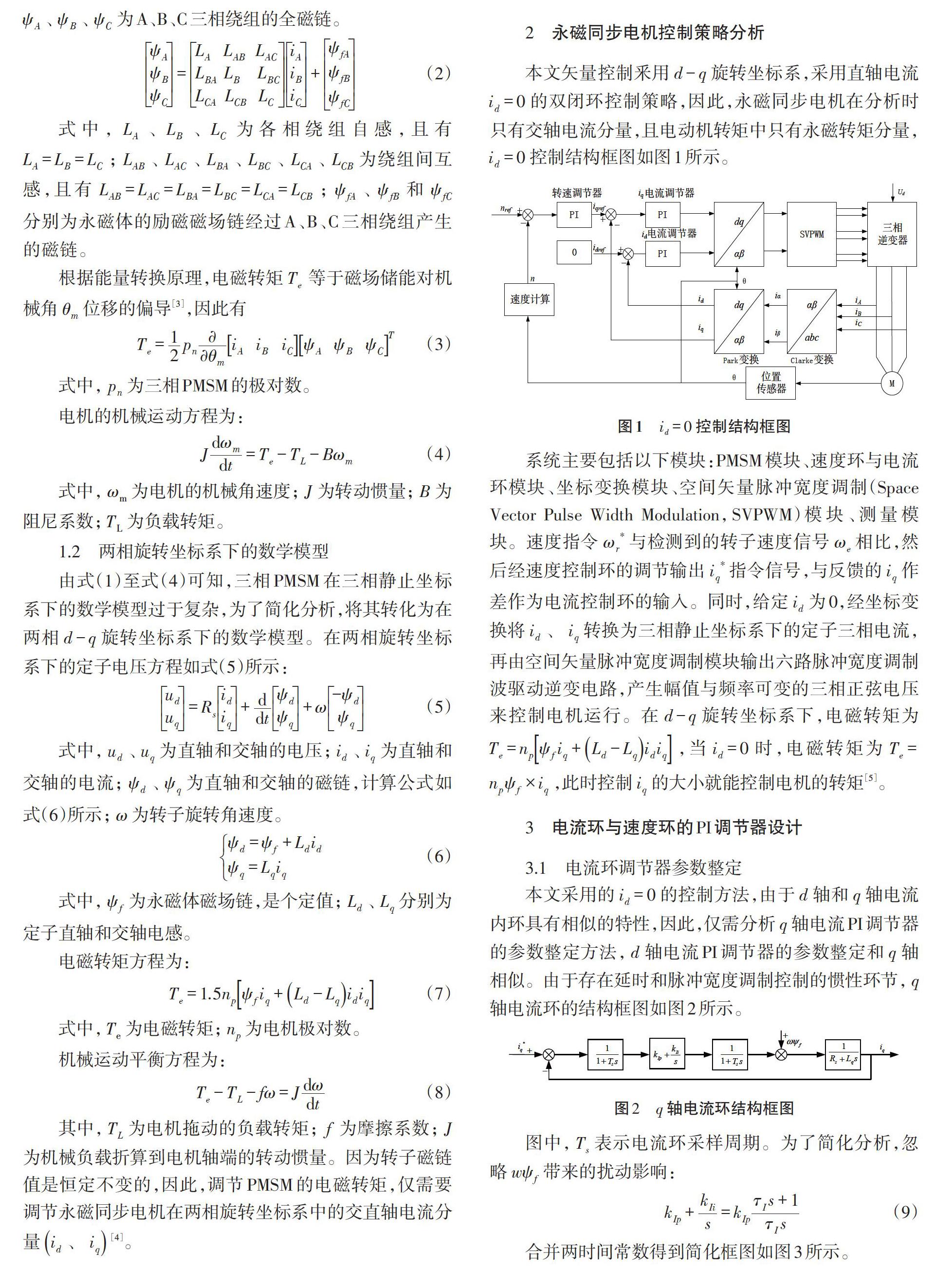
本文矢量控制釆用[d-q]旋转坐标系,采用直轴电流[id=0]的双闭环控制策略,因此,永磁同步电机在分析时只有交轴电流分量,且电动机转矩中只有永磁转矩分量,[id=0]控制结构框图如图1所示。
系统主要包括以下模块:PMSM模块、速度环与电流环模块、坐标变换模块、空间矢量脉冲宽度调制(Space Vector Pulse Width Modulation,SVPWM)模块、测量模块。速度指令[ωr*]与检测到的转子速度信号[ωe]相比,然后经速度控制环的调节输出[iq*]指令信号,与反馈的[iq]作差作为电流控制环的输入。同时,给定[id]为0,经坐标变换将[id、iq]转换为三相静止坐标系下的定子三相电流,再由空间矢量脉冲宽度调制模块输出六路脉冲宽度调制波驱动逆变电路,产生幅值与频率可变的三相正弦电压来控制电机运行。在[d-q]旋转坐标系下,电磁转矩为[Te=npψfiq+Ld-Lqidiq],当[id=0]时,电磁转矩为[Te=][npψf×iq],此时控制[iq]的大小就能控制电机的转矩[5]。
3 电流环与速度环的PI调节器设计
3.1 电流环调节器参数整定
本文采用的[id=0]的控制方法,由于[d]轴和[q]轴电流内环具有相似的特性,因此,仅需分析[q]轴电流PI调节器的参数整定方法,[d]轴电流PI调节器的参数整定和[q]轴相似。由于存在延时和脉冲宽度调制控制的惯性环节,[q]轴电流环的结构框图如图2所示。
4 电机双闭环控制仿真与分析
4.1 电机仿真模型搭建
交流永磁同步电机的电流速度双闭环控制系统的仿真模型如图6所示,电机参数如下:定子电阻[Rs]=2.76 Ω,母线电压[Udc]=311 V,交直轴电感相等[Ld=Lq]=6.42 mH,电机的磁极对数为4,转子磁链[ψf]=0.133 Wb,转动惯量[J]=0.000 85 kg·m2。
电机的转速值为1 000 rad/min,负载转矩的初始值给定为0,系统运行0.1 s突变至3 N·m。仿真结果如图7至图11所示。
4.2 速度环调节器参数整定
将以上仿真分成两段进行分析。
4.2.1 空载启动(0~0.1s)。空载启动时,图7中电机转速迅速上升,图8中电机的转矩迅速上升至限幅值。0.01 s左右,电机速度达到1 000 rad/min,进入稳定运行状态,电磁转矩迅速降低,电机运行处于稳态。从图9所示的逆变器输出电压波形可知,电机启动过程中,电压频率增加,0.02 s进入稳态后,其周期变为恒定值。整个过程输出线电压幅值为311 V,与直流侧电压相同。空载启动时,图10中三相定子电流达到峰值11.3 A,进入稳态后电流幅值为0.31 A,这是由摩擦转矩造成的。启动过程中,励磁电流[id]略比0大,如图11所示,在[iq]达到限幅值后保持在其附近,电机进入稳态后[id=0],[iq]迅速降至0.25 A。
由电机电磁转矩方程[Te=1.5npψdiq-ψqid]可知,稳态过程[iq=Te/1.5npψf],经计算为0.25 A,与仿真结果一致。
4.2.2 突加负载(0.1~0.2 s)。在0.1 s处,负载转矩从0阶跃到3.4 N·m,电机电磁转矩迅速上升过程中产生13.3%的超调量,然后快速稳定在3 N·m。在突加负载时,电机转速下降30 rad/min,然后迅速上升至1 000 rad/min进入稳定运行状态。突加负载后,电枢电流[iq]迅速从0.25 A升至3.4 A,产生了12.8%的超调量,然后迅速稳定在3 A,励磁电流上升至0.15 A。
以上仿真结果说明,电机在空载起动过程中,电流内环快速饱和,电机能够迅速以最大转矩启动。在突加负载后,系统能快速反应,输出转矩快速跟随负载转矩,使系统恢复至稳定状态,系统的抗扰动性能优良。电枢电流[iq]与电磁转矩[Te]呈线性关系变化。励磁电流[id]的波形始终在零附近波动,而且相电流波形较为理想,实现了对励磁电流的控制,验证了电流環和转速环PI调节器参数整定方法的正确性。在施加外部扰动的情况下,电机具备较好的抗扰动特性。电机转速在突加负载过程中速度降落较低,调节时间较短,系统响应快速且平稳。
5 结语
本文采用[id=0]的矢量控制方式,分析了永磁同步电机电流环与速度环双闭环控制系统的参数整定方法,指出了电流环作为转速环内环时控制器设计过于复杂的问题。本文提出的方法是在进行速度环控制器的设计与参数整定时,对电流环内环传递函数进行降阶,从而简化了速度环控制器的设计与参数整定。同时,在MATLAB/Simulink仿真环境下进行仿真,证明了此方法的正确性和有效性。
参考文献:
[1]丰飞,邵瑛.永磁同步电机新型模糊PI算法的研究[J].自动化技术与应用,2020(10):5-10.
[2]胡晓伟,黄敏.基于变论域模糊PID航空EMA永磁同步电机矢量控制仿真研究[J].航空精密制造技术,2020(5):31-33,43.
[3]刘东立,王世璇,张逸凡,等.永磁同步电机模糊自适应PI控制系统设计[J].电动工具,2020(4):4-6,26.
[4]孙萍.永磁同步电机矢量控制系统电流环的优化研究[D].青岛:青岛大学,2020:24.
[5]胡长岭,王东平.PMSM矢量控制研究[J].工业控制计算机,2020(6):155-156.
猜你喜欢
现代电子技术(2017年1期)2017-02-16
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
电脑知识与技术(2016年13期)2016-06-29
科技视界(2016年12期)2016-05-25
电脑知识与技术(2016年2期)2016-03-22
电脑知识与技术(2016年1期)2016-03-22
哈尔滨理工大学学报(2015年6期)2016-02-18
哈尔滨理工大学学报(2015年3期)2015-09-21
科技与创新(2015年18期)2015-09-11
