
基于薄膜电阻的风动压检测系统*
2021-06-07 05:27:58田俊琦秦会斌华咏竹
传感器与微系统 2021年5期
田俊琦, 秦会斌, 华咏竹
(杭州电子科技大学 新型电子器件与应用研究所,浙江 杭州 310018)
0 引 言
风动压又称冲击波动压,是高速运动的气流产生的压力,从而在运动方向上产生冲击压强,也可以表示为单位体积的空气所具有的动能[1~3]。对于风动压的实时监测和监控可以让人们及时对较大的风动压及时做出应对措施,保证工厂、农场日常工作的正常进行,从而减少损失。目前风动压测量技术已广泛应用于工业、农业和风速风压测量领域。动态压力测量技术主要用于实现压力测量,但在超音速流动中,测量管头会产生体外冲击,无法准确测量流动压力,并且其动态特性会严重限制管腔效应。在一些试验中会使用动态压力探测法来测量风压,但是由于试验环境的特殊性,传感器动态特性较低。所以研究一种新型测量风动压的方法十分必要。
本文研究了基于薄膜电阻的风动压检测系统,试验结果表明这种检测系统可以准确检测风动压,具有良好的应用前景。
1 研究背景
目前,国内外在风动压的具体测量方法上进展不多,主要侧重于理论和仿真的研究。在国内,对于风动压超压理论的研究有优秀进展的学者有很多,他们对各自实验中的风动压超压衰减规律和分布进行了详细的计算[4~8],理论研究已经较为成熟,因此,对于风动压的测量方法的研究已经是迫在眉睫。
国内现阶段设计的传感器基本都是扩散硅压力变送器,量程一般都在60 MPa左右,量程无法满足较大风动压的环境。测量方式都是直接正面测量,难以安装固定在实际环境中,而且在测量环境中存在一定的损毁风险,故需要采用更为有效且稳定的测量方法。
2 系统总体框图
风动压信号具有持续时间短,变化快,干扰大的特点,属于非平稳随机信号,要求风动压测量器件具有很好的动态特性和较高的频率。风动压测量系统框图如图1所示。
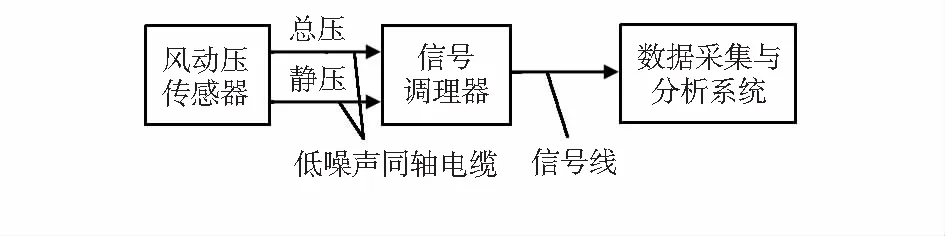
图1 风动压测量系统框图
风动压传感器通过两根低噪同轴电缆将测量到的数据传入信号调理器,然后通过信号线传入数据采集与分析系统进行信号分析处理,从而得到最后的风动压数据。可以看出风动压传感器是整个系统的关键组件,决定了整个系统的稳定性和准确性,故传感器的设计是本文系统设计的重中之重。
3 系统设计与分析
3.1 热敏电阻的选取
由于在产生较大风动压时,同时会伴随着环境温度的大幅升高,因此,所选择的热敏电阻的测量范围需要达到1 000 ℃,对电阻薄膜化可以使其对温度变化更加敏感。铂材料在物理化学性能上表现很稳定,所以铂电阻在测量温度上很适合,表现出很好的稳定性,经常被用于中低温区的温度测量电阻,是一个理想的、精度高的、稳定的测温元件[9]。铂电阻在0~850 ℃的中低温区呈现线性关系其线性关系如下
Rt=Ro[1+A×t+B×t2+C(t-100)×t3]
(1)
式中Ro=100 Ω,A=3.908 3×10-3,B=-5.775×10-2,C=-418 3×10-4。
对于铂电阻高温区呈现的非线性,需要利用其非线性曲线获取温度值,因此薄膜铂电阻符合风动压的检测。
3.2 热敏电阻阻值采样
热敏电阻测量温度需要将热敏电阻的阻值转换成电压,利用单片机进行A/D采样处理获取电阻值变化量。
在铂电阻高精度测量系统中,需要把引线的电阻去除,通常消除铂电阻引线电阻采用四限制接法。四线制接法如图2所示。

图2 四线制接线法
四线制接法原理图如图所示,主要有两个部分组成,一部分是恒流源动力引线,包含了R1和R2两条引线,作用是将薄膜电阻连接到恒流源;另一部分是电压驱动引线,包含了R3,R4两条引线,作用是将铂电阻的电压信号连接到仪用放大电路。四线制接线法将电路分为两部分,可以通过消除引线上电阻的影响来保证温度测量的精度,因此可以运用于高精度温度测量的场景[10]。
为了滤除电路中的干扰信号,四线制接法采用了抗混叠滤波和采样保持电路,这样可以对混叠信号进行更有效的处理,衰减信号直至滤除。原理图中的R0和C1组成RC低通滤波电路,目的是滤除频率大于1/2πRC的高频信号。C2为采样保持电容,用于减少误差和增强A/D转换器性能,此外还能滤除高频谐波。
3.3 流速和风动压计算
风动压具有破坏性强的特点,因此需要间接测量流速,再转换成风动压。测量流速时需要给薄膜电阻添加一个稳定的直流电阻IC,使其有一个初始温度,当薄膜电阻周围空气介质的流速不为0时,流体介质的温度将影响薄膜电阻表面的热量,使薄膜电阻表面温度发生变化,根据热平衡方程,如下
ε=A+BVn
(2)
(3)
式中A,B,n为薄膜电阻引线热参数及其它影响的常数,V为气流速度,IC为流过薄膜电阻的电流,T为薄膜电阻温度,T0为气流温度,ε为散热系数,Rt为温度为T时的薄膜电阻阻值。
忽略流动时的高度差影响,理想流体沿着一个方向定向流动时,流体的伯努利方程可表达为
P+ρv2/2+ρgh=c
(4)
式中P为压强,ρ为密度,v为速度,g为重力加速度,c为常量。
也就是说流体的流动过程中,流速V和压强P成反比[5]。因此,利用热平衡方程可以根据薄膜电阻测量到流速,再根据伯努利方程可以得到风动压。
3.4 数字滤波算法
由于薄膜电阻温度特性具有波动性,所以,需要对一组垂直于流速方向上的电阻进行多次采样。薄膜电阻分布如图3所示。
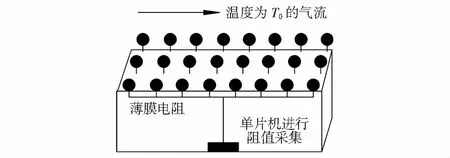
图3 薄膜电阻分布
采样的结果需要进行数字滤波处理。其工作原理是使用一些数学方法算法对数据进行筛选处理,去除掉频率段范围外的信号,留下较为准确的信号。为了得到更好的滤波结果,可以将多种功能不同的滤波器组合起来,来共同处理一个信号,这种滤波器被称为复合数字滤波器[7]。通过限幅滤波算法和算术平均值滤波算法相结合,根据实际的测量环境先设定测量数据的上限和下限,在测量过程中先去除超过上限和下限的数据,连续采集10次数据进行取平均值,去除采集过程中异常数据,数字滤波前后数据对比如图4所示。

图4 字滤波前后数据
3.5 滞后补偿
由于在测量过程中,电阻检测温度和电阻阻值变化过程都存在一定的时滞,时滞的累积会导致较长的延时,使得系统不能准确地跟踪到输入量。而且当外部信号干扰系统时,系统的超调量会慢慢增加,造成数据的不准确,因此,需要对滞后进行一定的补偿。在控制系统中,需要W(s)调节器的传递函数对上一个预估器实现对纯滞后性的施密斯补偿。
Gp(s)*e-τs为系统的控制对象传递函数,Gp(s)是G(s)中不包含纯时滞特性部分的传递函数,W(s)为系统的前向控制器。史密斯预估器的原理便是在控制器W(s)两端并联一个补偿环节,用来补偿控制对象的时滞部分,这个补偿环节即是预估补偿器[8]。施密斯补偿传递函数如图5所示。

图5 施密斯补偿传递函数
4 测试结果
由于测量环境的特殊性和局限性,在模拟环境中放置固定基于薄膜电阻的风动压检测系统。将实验环境中采集的数据进行处理保存,根据最终采集到的数据进行绘图,所得的风动压波形数据如图6所示。

图6 风动压测量波形
从波形可以看出,在45 ms左右处有剧烈波动,分析可知是由于模拟环境影响了系统工作,从而产生了较大的毛刺。总体来看,风动压测量系统可以较为准确的测量出风动压的值。
5 结束语
将电阻变化量根据热平衡方程将转换成流速,根据伯努利方程把流速转换成风动压,利用数字滤波和滞后补偿获取到准确的检测数据。实验结果表明:基于薄膜电阻的风动压检测系统可以准确检测到风动压,体积小,性能稳定,适用于各种复杂的测量环境。
猜你喜欢
风机技术(2021年3期)2021-08-05 07:41:36
发明与创新(2018年17期)2018-08-09 09:24:22
成都信息工程大学学报(2018年2期)2018-06-27 08:22:30
电子测试(2018年6期)2018-05-09 07:31:53
幼儿教育·父母孩子版(2017年1期)2017-04-05 02:15:47
现代工业经济和信息化(2016年2期)2016-05-17 05:34:30
现代制造技术与装备(2015年4期)2015-12-23 10:20:20
煤炭学报(2015年10期)2015-12-21 01:55:27
采矿与岩层控制工程学报(2015年3期)2015-12-16 19:20:45
机床与液压(2015年6期)2015-03-09 03:32:22
