汽车电动尾门电控防夹方法的研究
2021-06-03 06:11:10广州应用科技学院王孟涛
电子世界 2021年9期
广州应用科技学院 王孟涛
现代智能汽车技术飞速发展,尤其新能源车作为炙手可热的研究对象,车身的智能安全技术也进入研发阶段。本研究针对汽车的电动尾门防夹技术进行研究。主要对汽车尾门防夹持的软件算法进行研究。通过对汽车尾门的硬件结构分析、对尾门运动结构进行数学建模,对尾门的运动推杆的电流和电压信号进行监测、采集、滤波、计算、比较,最终找出尾门发生加持时产生的防夹力和尾门撑杆的电流信号的关系,从而对加持力进行有效的估计。最后通过仿真实验,验证了这种力学信号和电学信号的关系,最终对尾门运动进行精准的控制,使汽车尾门运动的安全性得到有效的保证。
1 汽车电动尾门电控防夹研究内容
汽车尾门关闭时可能发生意外夹伤人体事件,针对汽车尾门的防夹策略进行研究,使得车辆使用的安全性得到保证。本研究对汽车电控尾门的运动进行研究,测试出尾门在不同加持力的作用下电流的变化。判断加持力和电流大小的关系。当汽车在停止、运行、受到噪声干扰时的不同状态下,撑杆中受到的阻力的性质和电流的关系,最终通过电流来控制汽车尾门的运动状态,保证汽车电动尾门的安全运行。
2 汽车电动尾门电控防夹的基本原理
智能汽车的电动尾门中,通过中央控制器发出指令,控制尾门运动。对汽车尾门撑杆进行剖析后发现尾门中包含有一颗直流电机,我们可以通过对直流电机的驱动控制达到尾门防夹持控制。主要做法对尾门撑杆电机的硬件电路进行修改,在电路中加入一颗高精度电阻,这样可以做到更加精确的采集、控制电机电流。对于电流信号的获取,需要多次实验,找出在发生加持的临界点对应的电流值,该电流值设置为加持阈值,当电流信号在加持阈值范围内时认为未发生加持伤害,当电流值超出加持力阈值时则发生加持伤害。我们通过对汽车尾门的运动轨迹进行分析,找出尾门运动时容易发生加持伤害的高风险区域,对区域进行空间标记,通过标记信号结合尾门防夹控制信号,达到安全的控制。在汽车的直流电机系统中,尾门位置的获取是通过在直流电机中安装一颗霍尔元件,霍尔元件的作用是对直流电机的电流脉冲进行计数,以脉冲数的方式记录尾门的空间防夹标记位置。最终从尾门的机械结构和电机的电流控制设计结合,设计为尾门的防夹控制系统。
汽车电控尾门防夹控制的内环是速度闭环控制,将角速度信号作为负反馈系统的信号变量。电流的脉冲信号采集原理为:在直流电机的电机轴上安装一个磁铁,当电机每次发生旋转时磁体都经过霍尔传感器,每经过霍尔传感器一次会产生一个脉冲信号。T为脉冲信号的周期,P为直流电机运行一圈时的脉冲数,根据式(1)得出转速n。霍尔传感器的位置。

电控尾门防夹控制的外环为电流闭环控制。根据直流电机的电流特性,在电流闭环控制中找出电流和电压的关系,如下:

直流电机两端的电压为U,直流电动机系统的转动惯量J,等效电感L,电阻R和K1,K2视为常数。尾门关闭时所受阻力增加,由于等式两端等效关系保持不变,因此电流I(S)变大,这说明汽车尾门在关闭过程中遇到障碍物的阻挡,我们视为发生加持。它将导致电路中电阻变大,电机转速变小,电流增大。对于这种特性,我们可以通过对直流电机的电流进行采样,间接确定尾门系统是否发生夹持。
电机中的电流特性在尾门的不同运动过程中表现不同,并且汽车电控尾门的特性也受到尾门整体的连杆结构传动系统、尾门使用寿命、汽车尾门工作电压之间的差异等因素影响,为了有效的研究汽车尾门工作电流与直流电机之间的关系,要在不同工作环境下对电机的电流特性进行进一步研究。
3 基于电机电流信号斜率的尾门夹持判断
对直流电机的工作电流进行分析,我们可以得出如下结论:直流电机的工作电流与输出转矩成正比,确认了电流信号的变化可以直观的反映电机夹持力的实际工作情况,故电机电流的变化可以作为尾门是否发生加持的依据。
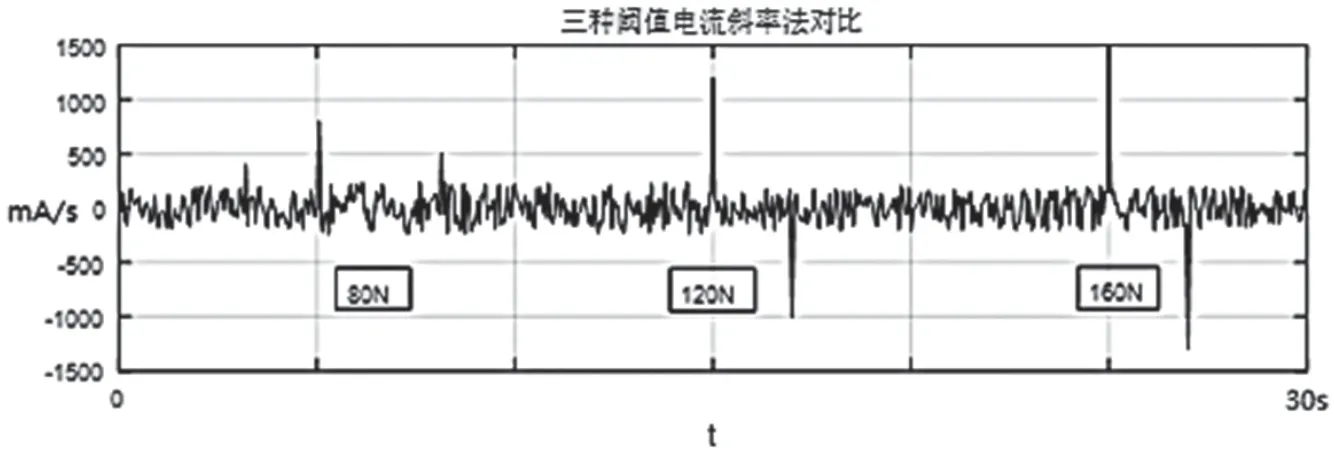
通过对电流信号的处理,希望能够更加精确的控制汽车尾门的运动。电流斜率法是实时采集直流电机电流的幅值数据,将它作为防夹判断的依据。当汽车尾门在空间上运行至机械停止位时,尾门直流电机的电流变化率最大;当电机驱动尾门运动过程中,尾门遇到障碍物时的电流大小弱于机械停止位电流;电机正常工作时电流最小。假设当汽车尾门运行至机械止位时电动机电流变化率为Kmax,当汽车尾门遇到障碍物时阈值速率为Kobst。我们对电机的电流数据进行采集,计算出电流数据的斜率K,当K>Kobst且K 由式(3)可知,取宽度为T时间段,计算T时间段中两点之间的斜率,取斜率的平均值K,和防夹力阈值比较,当K大于斜率阈值时则判定为发生夹持。 为配合电动汽车尾门的防夹持测试实验,以实车尾门尺寸为依据,用不锈钢材料搭建了一个模拟的尾门实验台架,台架后盖尺寸为:1×1.2m,台架的后盖空间运行轨迹为0°~90°(物理可调)。实验台架的物理构建主要包含:底座、后盖、电动撑杆和连杆机构以及承重块等部分。各部分的主要作用如下: 底座:用于固定整个尾门后盖的连杆机构,模拟实车,用于承载汽车尾门的物理系统,放置防夹系统的控制器; 后盖:汽车后备箱尾门盖,发生加持时夹持力的提供物件,测试汽车尾门夹持力的主要物理器械; 电动撑杆:内部包含一个直流电机,为整个汽车尾门提供动力,并且是连接汽车后盖与连杆机构的物件; 连杆机构:尾门的重要支架,位于底座上,共两件,左右各一件,是整个仿真尾门的力学传动系统,连接尾门各部分; 承重块:模拟出不同的尾门重量进行测试,当尾门系统进行防夹力测试时,放在后盖上提供不同的加持力。由于不同的汽车尾门重量不同,为测试整个汽车尾门防夹系统的安全性与鲁棒性,用不同的重量来对防夹系统进行测试。 对尾门进行防夹持实验,首先通过软件将电动汽车尾门关闭总耗时设置为30s,利用STM32控制器对电流信号采集速度进行设置,设置为0.05s/次,控制器控制电动撑杆的行程速度设置为3mm/s。在总耗时30s内控制器共采集到电流信号数量为600次。为了能保证实验的准确性,在实验中设定多种防夹持力的阈值进行测试,本实验防夹力大小分别设置为80N、120N、160N,利用实验台架进行三轮夹持实验,每轮实验将以上三种不同阈值的夹持力作用在实验台架上进行;系统通过基于提出的斜率法计算出电流数据变化的实验。实验结果如图1所示。 图1 夹持力基于斜率法电流变化实验 通过实验采集的电流信号我们得出最终结论:当汽车尾门撑杆电机发生夹持时,在夹持力作用下,电机电流信号发生了70~90mA的变化,验证了当尾门系统发生夹持时,电流发生突变,这种电流信号的突变说明了夹持力的变化。在电流变化时,实验直接采集的电流信号均包含有毛刺,这种电流信号的毛刺噪声影响了我们对夹持力阈值的设置。因为电流阈值的设置是判断系统夹持力的关键因素,当阈值不同直接影响的是发生加持力的大小。最终通过不同的夹持力阈值进行实验,发现斜率法的使用可以弱化了噪声的影响,使汽车尾门发生夹持时,经过斜率法的夹持力算法使得夹持力信号更加明显,使得加持力的判断更加准确。
4 电动尾门防夹控制台架实验
5 防夹控制方法的台架实验及结果分析
猜你喜欢
汽车与驾驶维修(维修版)(2023年2期)2023-05-19 09:16:44
大电机技术(2022年5期)2022-11-17 08:12:56
汽车维护与修理(2022年3期)2022-08-02 07:40:34
汽车实用技术(2022年10期)2022-06-09 11:16:26
铁道车辆(2022年1期)2022-03-09 01:56:42
机械设计与制造工程(2021年3期)2021-04-16 13:06:54
科学技术创新(2020年31期)2020-10-30 05:49:10
电子制作(2017年1期)2017-05-17 03:54:12
护理研究(2015年5期)2015-05-10 01:47:54
淮南师范学院学报(2015年3期)2015-03-22 01:16:17