高职工业机器人技术应用大赛智能相机识别优化研究与实践
2021-05-28 20:59凌旭周潮戴俊良
内燃机与配件 2021年8期
凌旭 周潮 戴俊良

摘要:随着全国高职院校职业技能大赛的开展,高职组工业机器人技术应用赛项题目难度越来越大,对学生的要求越来越高。根据大赛内容,其中智能相机对拍照图片的识别正确率高低,直接决定比赛学生的最终成绩。通过多次试验与优化相机识别方法,结合PLC触摸屏技术以及与工业机器人相配合,最终完成工业机器人关节零件的识别与装配过程。为以后的工业机器人技能竞赛操作过程指明方向。
关键词:智能相机;工业机器人;PLC;图像识别
中图分类号:G714 文献标识码:A 文章编号:1674-957X(2021)08-0245-02
0 引言
全国职业院校技能大赛高职组工业机器人技术应用赛项以“中国制造2025”规划为背景,通过技能竞赛促进和引导工业机器人相关专业建设,以赛促教,为工业机器人及系统在企业中的应用提供人才保障[1-2]。工业机器人技术应用赛项依托工业机器人智能工作站系統作为竞赛平台,多名参赛选手协作,以现场操作的方式完成工业机器人应用工作站系统中的配套设备机械电气系统的装调、工业机器人标定及示教器示教编程、通讯设置及操作编程、视觉系统编程调试、AGV机器人及码垛机器人的编程调试等基本工作任务,并通过对系统的人机界面开发及控制程序设计等完成工业机器人智能工作站系统的联机运行和特定制造流程等综合任务[3-5]。
工业机器人技术应用赛项已经进行多年,每年的题目难度都在增加,对学生的要求越来越高。分析历年来比赛的各个环节,其中视觉系统编程调试和工业机器人编程两个项目成为学生最大的失分项目。其中,相机识别的正确率决定了比赛得分高低,因此,本文通过试验与测试,优化编程,大大提高智能相机对图片的识别率。
1 工作原理
机器人处于托盘流水线和装配流水线的中心,相机处于机器人抓取工位之前,先进行识别再进行抓取,装配流水线能够配合机器人来回移动,保证机器人的工作范围足够。
托盘流水线拥有入口光电开关、拍照工位光电开关、抓取工位光电开关以及拍照工位和抓取工位的两个气档。
带着工件的托盘从入口进入流水线,入口光传感器电能够记录,到了拍照工位的光电传感器开关会打开,使气档升起进行拍照。拍照完毕之后进入抓取工位,光电传感器开关打开,气档隔断后方来的托盘,等到当前工件抓取完毕,托盘回收完成后气档降下,接收下一个托盘。
装配流水线从左至右依次为成品库、装配工位、废料库工位三个部分。装配工位配置有四个定位工作位,规定为1号位、2号位、3号位和4号位。每个定位工作位安装了伸缩气缸用于二次定位,当机器人将工件送至装配工位后,必须通过气缸进行二次定位,提高机器人的抓取精度,以保证能够顺利完成装配,废料库用于存放缺陷工件。
成品库主要用于存放已装配完成的工件,机器人按工件号1→2→3→4的次序在装配工位定位后依次进行装配;当4号工件装配到位后,机器人带动4号工件顺时针旋转90度扣紧,整套工件组装完成。组装完成之后机器人将成品移动到成品库。
2 程序设计
2.1 通讯程序设计
通讯交换的数据包括:相机识别工件的位置信息数据,工件实时位置信号数据,机器人抓取、装配、送料等信号数据,PLC状态、联机信号数据,同时也包括一些放在触摸屏上的动画信号数据。
通讯系统以工业交换机为核心交换各种数据,从相机处获取的工件数据,经过处理最终将其发送至机器人处进行抓取,PLC与机器人之间需要不断交换数据来保证程序的同步运行,触摸屏要能够实时监控全局数据,并且进行要能设置一些基本功能完成程序运转,计算机要能够输入各种程序,基于以上条件来设计通讯,才能保证系统的正常运行,本次的机器人不需要编写通讯程序,只有PLC需要设计通讯程序以及相机软件中的输出配置,最后再设计好触摸屏的动画布局,整个通讯系统就建立完成了。将机器人和相机的预设地址输入ModBus_CLENT块建立通讯。
当在监控模式下STATUS显示“0000”说明通讯正常,若不为“0000”说明通讯出现问题,需要查表解决。
通过通讯连接,PLC能接受相机识别的数据,处理后再发送给机器人。相机与PLC之间是单向传输,所以只需要一个ModBus CLENT块来读,PLC与机器人之间是双向传输,所以需要两个ModBus_CLENT块,一个写一个读。
2.2 相机程序设计
相机的识别工具要能够清楚地记录到工件的位置、角度信息,并且某一工件的识别工具其他工件是不能通过的,这方便输入脚本,确定工件的类型。同样识别一个工件的图像,有很多的方法,但是每个方法的识别度有所差异,我们需要实验得到识别度最高得方法,以设计出较稳定的相机程序。
在实验中发现,光照对工件识别的影响最为大。当光过亮或过暗,识别工具的准确性会极大地下降。所以实验要对光源进行单一变量实验,找出最合适的光照强度。
在合适的光照强度下,可以对不同识别工具的准确性进行实验,首先实验的是定位工具的定位准确度。
经实验,圆环内圆定位的精度远在图案定位之上,使用圆环内圆定位来确定位置更为准确,但是机器人还是需要工件的角度信息才能正确抓取,所以需要将两个工具搭配使用,一个提供位置,一个提供方向。
图1所示,2号工件虽然不是一个圆形,但是圆环内圆定位工机具可以补全圆,实验后发现2号工具也能使用该工具进行定位。
3号4号工件与1号工件同样为圆形,所以实验数据相差较小。定位完成之后进行工件型号识别的实验,图案定位工具由于是通过软件学习工件图像,具有一定的识别功能,对于1号工件和2号工件这种差异较大的工件识别起来比较准确,工件对应图案定位的识别度能达到95%以上,但对于3号工件和4号工件,由于形状差异较小,识别度只能保持在60%,经过不同工具的实验,我们挑选出了矩形区域内目标计数,通过识别3号工件和四号工件孔的数目的不同来区分这两个工件,在1号工件识别没通过的情况下,如果当前图像具有三个孔为3号工件,两个孔为4号工件。
矩形区域内目标计数的准确性非常高,只有光照强度过高或者过低才会识别不到相应的孔,在光照适中的时候,识别率能达到100%。
之后需要设置脚本,添加5个变量分别表示所拍到图像的X、Y坐标信息,还有Z为工件的高度信息,A为工件的角度信息,TEY为工件的类型。
之后根据需求来输入脚本,如以下2号工件的识别脚本:
Tool3工具是用来识别2号工件的,当Tool3工具通过时,识别的工件为2号工件。
if(tool3.Out.objectNum>0)#当tool3通过时
{
tool5.X=(tool2.Out.centroidPoint[0].x-323)*80/156;#计算工件当前X坐标
tool5.Y=(tool2.Out.centroidPoint[0].y-211)*80/156;#计算工件当前Y坐标
tool5.A=tool3.Out.centroidPoint[0].angle;#计算工件当前角度信息
tool5.Z=55;#赋值2号工件的高度信息
tool5.TEY=2;#赋值2号工件的工件类型
}
由于工件像素值与实际尺寸之间存在差异,所以在计算工件坐标的时候要乘以像素比。工件位置的X或Y坐标计算为:(当前X或Y坐标-中心点X或Y坐标)*像素值/实际尺寸。
2.3 工业机器人程序编写
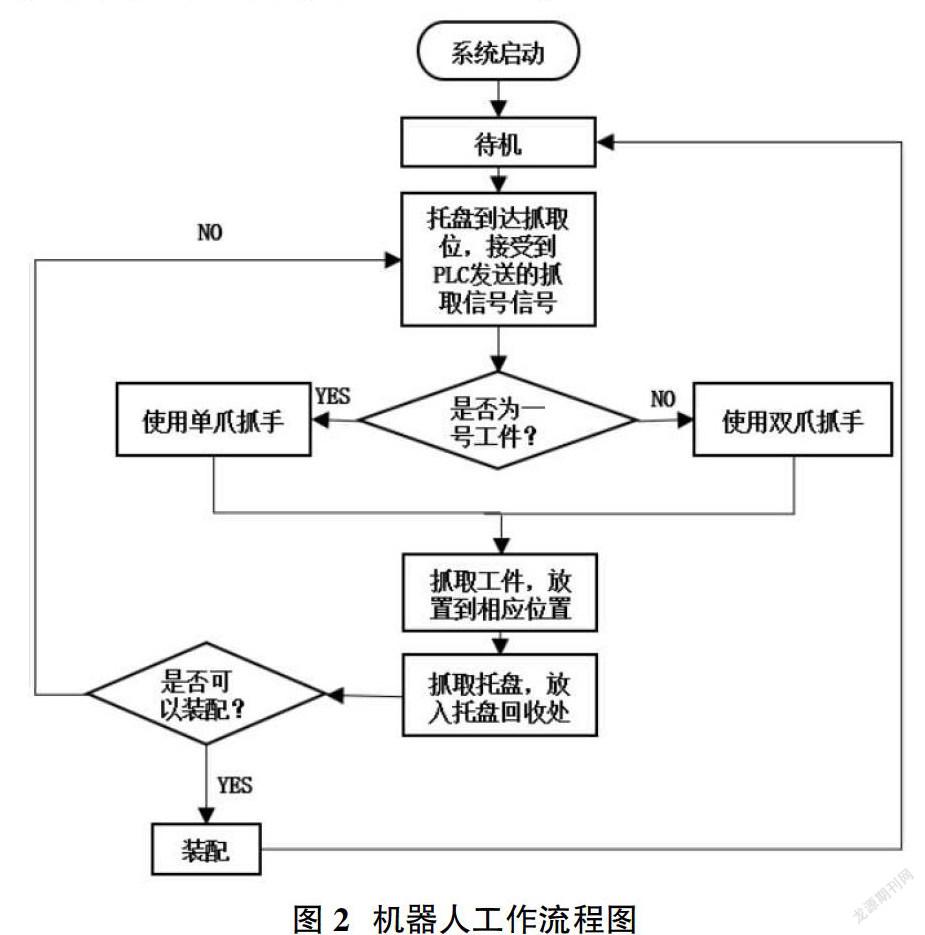
工业机器人首先需要示教抓取位位、托盘回收位置、工件放置位置的点,示教完成之后输入与PLC所配套的程序,即可完成流程,如图2所示。
1号工件需要用单爪进行抓取,2、3、4号工件需要双吸盘抓手进行抓取,机器人要根据相机识别出的工件型号选取合适的抓手进行抓取。
在合适的环境下,调整好相机的光圈及焦距,编写的相机程序对工件的识别率能达到100%,确保了作为整套系统“眼睛”的部分的稳定性。
智能相机作为大赛系统中外界变量可能会引起精度浮动较大的设备有着较高的不确定性,比赛场环境不确定性,使得参赛学生在不同环境因地制宜做出调整,通过对光圈焦距进行一定的修正,以及相机软件内部参数的调试,通过上述识别方法会有不俗的表现。
3 总结
结合全国高职院校职业技能大赛工业机器人应用技术赛项的要求,分析智能相机在图像识别方面的特点,优化图像识别操作方法和工业机器人配套程序。通过多次的试验证明方法可行性强。为以后的工业机器人应用技术大赛学生备赛提供很好的思路和方法。
参考文献:
[1]温剑锋.基于人工智能的视觉目标定位系统设计[J].现代计算机,2020(35):65-69.
[2]张纯纯,冯创意,高统林.基于机器视觉的目标识别与抓取研究[J].农业装备与车辆工程,2019,57(12):93-96.
[3]李金莉.技能竞赛背景下工业机器人技术应用课程教学研究[J].東西南北,2019(19):117.
[4]徐青青.基于机器视觉的工业机器人智能分拣系统设计[J].仪表技术与传感器,2019(08):92-95,100.
[5]沈玲.依托技能大赛提升专业教学质量浅探——以工业机器人技术应用赛项为例[J].湖北工业职业技术学院学报,2018,31(03):51-55.
猜你喜欢
国际商业技术(2022年4期)2022-04-21
数码世界(2019年6期)2019-09-09
计算机应用(2016年10期)2017-05-12
科技创新导报(2016年21期)2016-12-17
中国信息技术教育(2016年21期)2016-12-05
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
科技视界(2016年18期)2016-11-03
企业导报(2016年13期)2016-07-19