铸件切割打磨机器人工作臂关键部件有限元分析
2021-05-28 13:53居多柱
内燃机与配件 2021年8期
关键词:有限元
居多柱




摘要:为保证铸件切割打磨机器人工作臂关键部件强度和零件材料选择的合理性,运用ANSYS Workbench软件对铸件切割打磨机器人工作臂关键部件进行静力学分析,有限元分析结果表明:砂轮切削打磨装置进行曲面切削打磨,承受左三向力极限载荷时,最大位移变形量为0.29332mm,发生在打磨头;最大等效应力为85.45MPa,发生在打磨头与打磨头固定位置左上侧,即结构强度和刚度满足砂轮切削打磨装置工作要求,为铸件切割打磨机器人结构设计和强度校核提供了参考。
Abstract: In order to ensure the rationality of the strength and material selection of the key components of the working arm of the casting cutting and grinding robot, the static analysis of the key components of the working arm of the casting cutting and grinding robot was carried out by using ANSYS Workbench software. The results of the finite element analysis show that the maximum displacement deformation of the grinding wheel cutting and grinding device is 0.29332 when it is subjected to the limit load of the left three-way force The maximum equivalent stress is 85.45MPa, which occurs at the upper left side of the fixed position between the grinding head and the grinding head, that is, the structural strength and stiffness meet the working requirements of the grinding wheel cutting and grinding device, which provides a reference for the structural design and strength check of the casting cutting and grinding robot.
关键词:切割打磨机器人;混联结构;TRIZ;有限元
Key words: cutting and grinding robot;hybrid structure;TRIZ;finite element analysis
中图分类号:TO242.2 文献标识码:A 文章编号:1674-957X(2021)08-0052-02
0 引言
近年来,机器人技术迅速发展,促进了加工制造产业自动化程度的提高。对于工业产品来说,在加工制造时对产品的表面精度有着较高要求,为适应这些要求,通常在众多的加工工序中往往会安排光整加工,而磨削加工即是提高工件表面质量的重要加工方法之一[1]。谢同雨[2]等设计了一种由多个模块构成的蛇形管道打磨机器人,验证了蛇形管道打磨机器人的通过性并得出机器人在管道内部前行的最佳匹配。许家忠[3]等针对复合材料工件表面打磨的机器人主动柔顺恒力控制问题,提出一种基于位置控制的自适应阻抗控制方案。崔国华[4]等设计了一种新型的自行走式端口打磨机器人并进行了力学分析。朱伟[5]等设计了一种3转动输出的3SPS+S仿腕关节柔性并联打磨机构,建立了机构运动方程,并得到了柔性支链变形量与动平台姿态的关系。
针对工业产品表面质量的提高,本文基于TRIZ创新设计理论[6](Theory of the Solution of Inventive Problems)设计出一款铸件切割打磨机器人混联工作臂,并运用ANSYS Workbench有限元软件[7]对工作臂切削打磨装置进行静力学分析。
1 铸件切割打磨机器人工作臂结构设计
根据TRIZ理论发明原理5组合原理,将铸件切割打磨机器人运动机构的并联机构(并联工作臂)再组合一个串联机构(可旋转的切削打磨装置),构成混联工作臂,如图1所示。
2 切削打磨装置有限元分析
2.1 前處理设置
运用ANSYS Workbench软件对机器人混联工作臂切削打磨装置进行有限元分析,将切削打磨装置STEP格式文件导入静力学模块中建立耦合关系,如图2所示。
2.1.1 材料参数设置
切削打磨装置末端工具采用金刚石磨料和树脂结合剂组成砂轮,其他材料采用牌号为ZG230-450(GB)的铸钢,其材料参数如表1所示。
2.1.2 网格划分
采用全局网格控制和参数设置方式,在Mechanical Modeler界面中对机器人切削打磨装置进行细化,得到网格划分图,如图3所示。
2.2 静力学分析结果
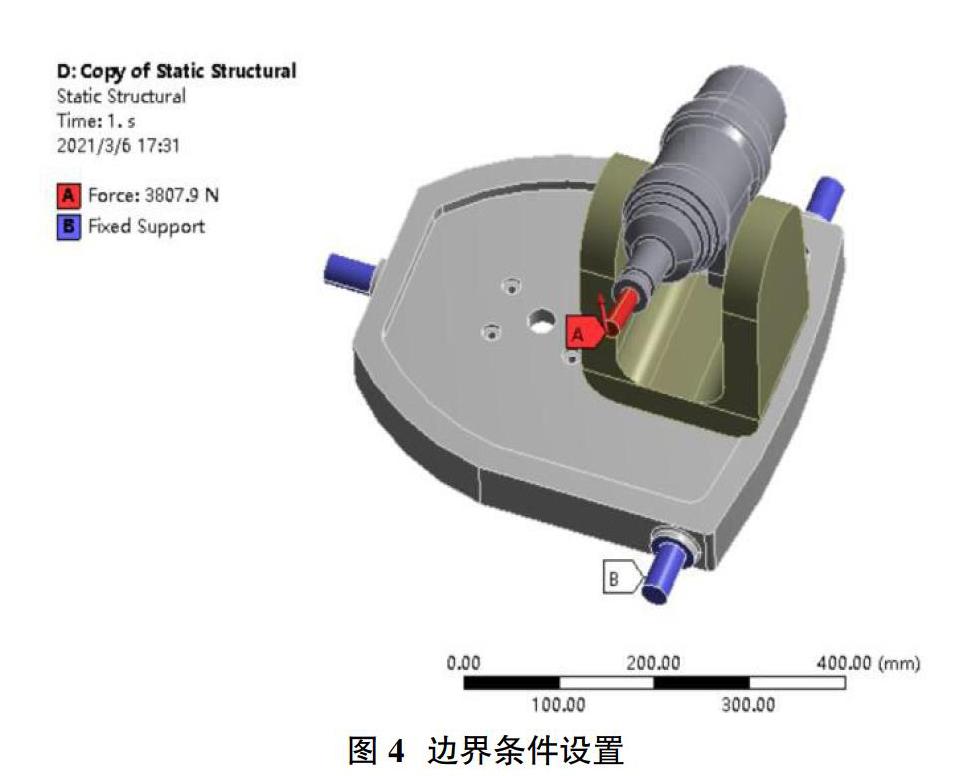
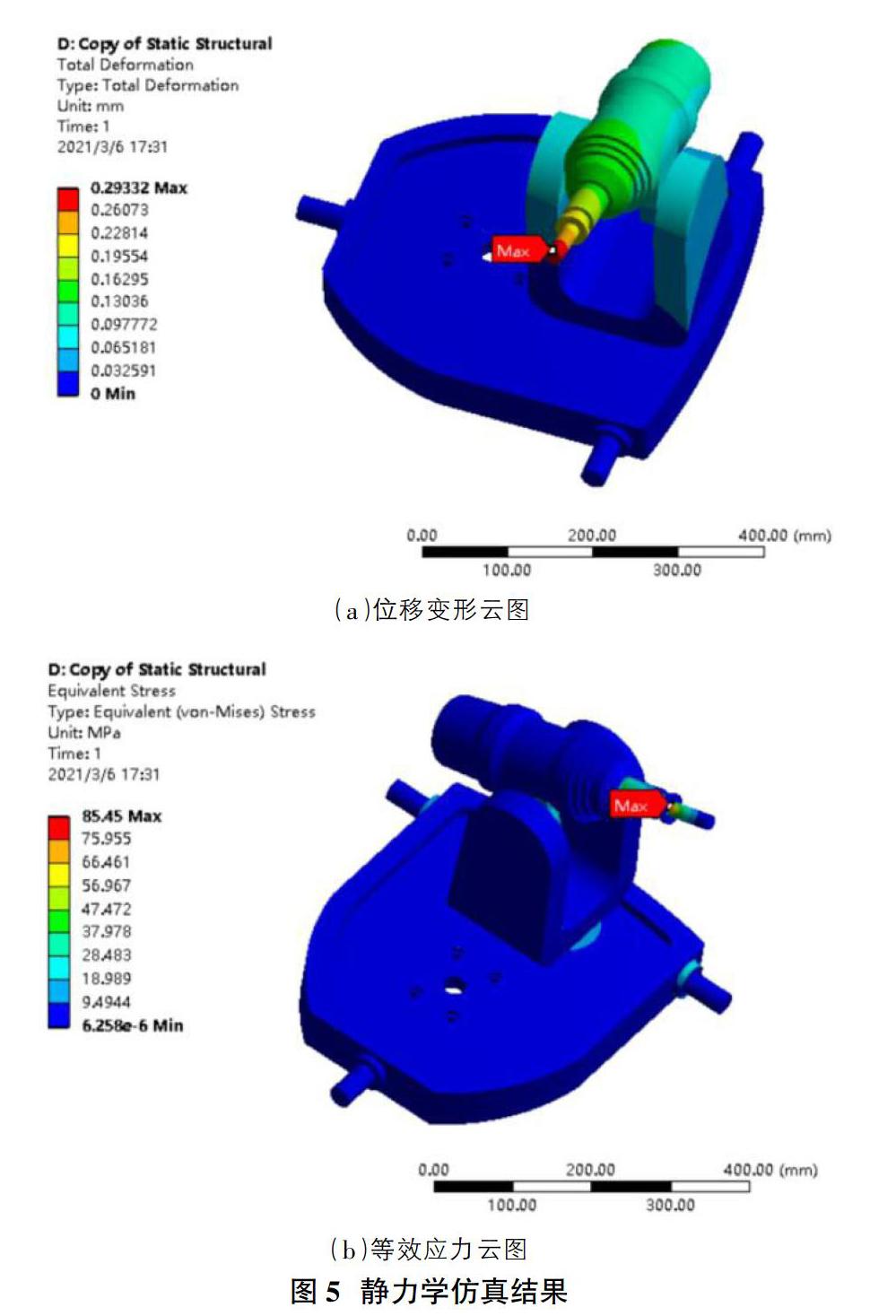
砂轮切削打磨装置进行曲面切削打磨时,承受左三向力极限工况设置如图4所示,求解结果如图5所示。
由图5(a)的可知,砂轮切削打磨装置进行曲面切削打磨,承受左三向力极限载荷时,最大位移变形量为0.29332mm,发生在打磨头;由图5(b)可知,极限载荷下的最大等效应力为85.45MPa,发生在打磨头与打磨头固定位置左上侧,且砂轮切削打磨装置进行曲面切削打磨,承受左三向力极限载荷时最大等效应力小于材料许用应力,故装置工作安全,材料选择合理。
3 总结与展望
本文运用ANSYS Workbench软件对铸件切割打磨机器人工作臂关键部件进行静力学分析,确保机器人混联工作臂进行切削打磨工作时工作稳定,结构安全可靠,为铸件切割打磨机器人结构设计和强度校核提供参考。
参考文献:
[1]姚光瑞.打磨机器人结构设计及有限元分析[D].沈阳工业大学,2020.
[2]谢同雨,李清,丁煜文,等.多模块蛇形管道打磨机器人的设计与分析[J].机器人,2020,42(06):672-685.
[3]许家忠,郑学海,周洵.复合材料打磨机器人的主动柔顺控制[J].电机与控制学报,2019,23(12):151-158.
[4]崔国华,刘健,马良,等.混凝土管端口打磨机器人设计及力学性能分析[J].中国机械工程,2019,30(06):665-671.
[5]朱伟,汪源,沈惠平,等.仿腕关节柔顺并联打磨机器人设计与试验[J].农业机械学报,2016,47(02):402-407,348.
[6]王成军,严晨,王浩.轻量化掘进机截割臂工作性能的离散元分析[J].科学技术与工程,2020,20(35):14470-14475.
[7]王成军,严晨,段浩.六自由度变胞振动试验台结构设计与动态分析[J].科学技术与工程,2020,20(10):3874-3880.
猜你喜欢
高教学刊(2022年13期)2022-05-24
中国应急管理科学(2022年2期)2022-05-23
科学家(2022年5期)2022-05-13
课程教育研究(2021年10期)2021-04-13
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
哈尔滨理工大学学报(2017年6期)2018-01-09
大陆桥视野·下(2017年8期)2017-09-19
农机使用与维修(2016年10期)2016-11-10
国外科技新书评介(2016年9期)2016-05-14