一种适用于IPOS DC-DC变换器的均压控制策略研究
2021-05-25 08:00:22刘艺滨于少娟
太原科技大学学报 2021年3期
刘艺滨,于少娟
(太原科技大学电子信息工程学院,太原 030024)
最近几年,国内外学者对光伏直流升压汇集与并网技术十分关注。[1]光伏直流并网技术的关键在于大功率,高变比DC/DC变换器的研究。模块化组合DC/DC变换器大大缓解了当前对大功率,高电压等级直流变换器的需求。在常见的多模块串并联组合结构中,输入并联输出串联组合结构适用于新能源发电的各种场合,比如海上风电的外送,大容量光伏发电直流输送等等。[2]对于IPOS DC/DC变换器来说,保证其输出端良好的均压效果是变换器正常工作的关键。[3]根据这一控制要求,目前有文献研究了几种IPOS变流器的均压控制策略。
文献[4-6]分别提出了运用交错控制策略,输入输出侧双PI环,和基于输入功率比重前馈机制的电压均衡控制策略解决上述问题,并分别验证IPOS变流器正常运行及故障运行时的串行输出端均压控制效果。
本文详细研究一种改良下垂的均压控制策略,利用系统串行输出端的电压与电路电感电流的下垂特性实现均压控制,通过补偿改进,提高了控制精度,大概率消除了在传统下垂控制方法中经常出现的静态偏差。[7]通过小信号拓扑模型分析控制策略稳定性并计算给出参数稳定范围。最后,通过搭建电路拓扑模型,仿真验证了该控制策略的合理有效性。
1 IPOS DC/DC变换器模型结构
1.1 子模块拓扑结构
对于多模块输入并联输出串联DC/DC变换器,子模块的拓扑结构为移相全桥电路,如图1所示。Sj表示IGBT,Dj表示IGBT的反并联二极管,Cj表示IGBT的寄生电容,Lr表示谐振电感,Tr表示子拓扑电气隔离变压器,Drj表示子拓扑输出整流电路二极管,Lf表示子拓扑全桥整流滤波电感,Cf表示子拓扑全桥整流滤波电容,S1和S3的激发开关管信号超前S2和S4一定相位,S1S3构成超前桥臂,S2S4构成滞后桥臂,在移相全桥子电路中,漏感抗存在于开关管IGBT的相伴电容和电气隔离变压器中,正是由于漏电抗的存在使工作电路的全控器件实现零电压开关。移相全桥子电路和控制电路都较简单,能输出较大功率并且变换效率高,因而也受到了普遍关注与广泛研宄。全桥隔离变压器采用中高频变压器进行电气隔离提高了系统的可靠性,并且比传统的工频变压器的功率密度高且轻巧。[8]

图1 子模块拓扑结构Fig.1 Sub module topology diagram
输出电压高且电流较小的场景下全桥整流方式有很大的应用可靠性,因此,变换器输出整流采用全桥整流方式。[9]
1.2 组合变换器拓扑结构
如图2所示,本文将研究将两个移相全桥电路构成的组合电路。

图2 IPOS变换器拓扑结构图Fig.2 IPOS converter topology diagram
每一个模块的移相全桥电路工作运行时分别采用载波移相独立控制,使其工作在正常稳定的状态。[10-11]
2 基于输出电压下垂的补偿改良均压控制方案
2.1 输出电压下垂控制方案
为了使IPOS直流变换器电路拓扑正常运行,使其能够在串行出口端实现均压效果,研究一种基于串行输出端电压下垂的均压控制策略。

图3 下垂均压控制策略框图Fig.3 Block diagram of drooping equalization control strategy


由以上分析可知,该控制策略不需要模块间频繁的信息交换和通信,缓解了模块间通讯失败后对系统稳定性的影响和风险,不过由于模块化程度不高和下垂控制自身存在的精度问题,该控制策略的精度稳定性还存在偏差,需要继续对传递函数进行优化。[12]
2.2 补偿改良的下垂均压控制方案
为了改良变换器拓扑电路控制精度和系统的稳定性,降低传统电压下垂控制的静态误差率,研究一种补偿改良的下垂均压控制方案,如图4所示。

图4 补偿改良的下垂均压控制策略框图Fig.4 Block diagram of compensation improved droop equalization control strategy

(1)
直接采用PI环控制有:
(2)
可见式(1)和式(2)的第一项是正比例函数关系,总有不同的Ki值使得(1)和(2)的第一项数值等式成立;对比第2 项可知,在输入侧与输出侧电压变比较高的大功率应用场合,电压突然变化的情况下(Uo-ref-Uoi)≪Uo-ref所以有K2≪Kp.本文提出的控制可以使暂态调节过程稳定性更高,过程更平滑,模块可靠性提高,抗外界干扰增强,因此具有很强的实际应用价值。
3 系统稳定性分析
下面对两个模块组成的IPOS DC/DC变流器采用小信号建模的方法分析其稳定性。[13]

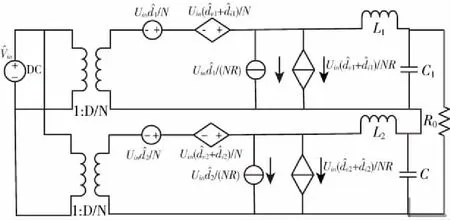
图5 IPOS 变换器小信号模型Fig.5 IPOS converter small signal mode
由图5根据基尔霍夫电压定律可以列出下列方程式[14-16]:
(3)
(4)
(5)
模块电压扰动方程为:
(6)
还可以推导出以下方程式:
(7)
由图4的控制策略可得两模块的占空比扰动信号为:
(8)
可以看到:Gvi电流环PI调节器控制函数;Gvo电压改良补足环I调节器控制函数;Fm锯齿波增益。

根据以上各个方程式可以得到:
(9)
特征根的各项系数表达式为:
(10)
当两个模块的串行输出端拥有等值电容,此时两个子拓扑电路串行输出端口等效阻抗完全相同;当串行输出电压有扰动波动时,两个子拓扑电路可以实现串行输出端输出完全均压,即输出电压扰动差为零。在实际电路中,由于两个模块的输出电容不可能完全相等,导致此时上述传递函数在原点处存在两个极点,这说明当输出电压存在扰动时,两个模块存在输出电压扰动差,且该扰动差既不发散也不收敛,输出偏差与模块参数以及环路参数的设置有关。可见稳定性是所提出系统均压控制策略的主要特点。[17]
因此,在该均压控制策略下,只需合理配置参数,就能减小模块间的输出偏差,从而实现多个模块串行输出端均压,使系统稳定。[18]
4 仿真验证
利用Matlab/Simulink 进行仿真,验证拓扑结构与控制策略的合理稳定性,在Simulink中搭建了由2个移相全桥电路模块构成的IPOS 组合系统仿真模型,仿真参数选取如表1所示。
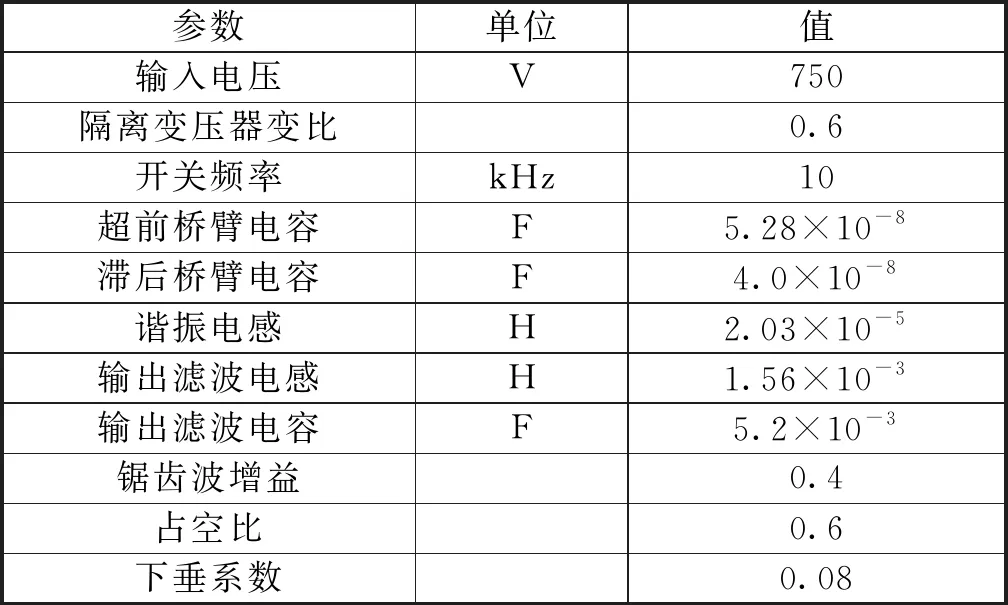
表1 仿真实验主要参数
4.1 输入电压突变时改良下垂均压控制策略仿真结果
通过图6可以看出,不投入均压策略时,当模块2的输入电压突变为650 V,模块2的输出电压达不到系统要求的1 000 V,在0.01 s左右升压完毕峰值电压达到900 V左右,经过一个暂降后稳定在850 V左右,两模块没有完成均压,影响系统的正常运行。
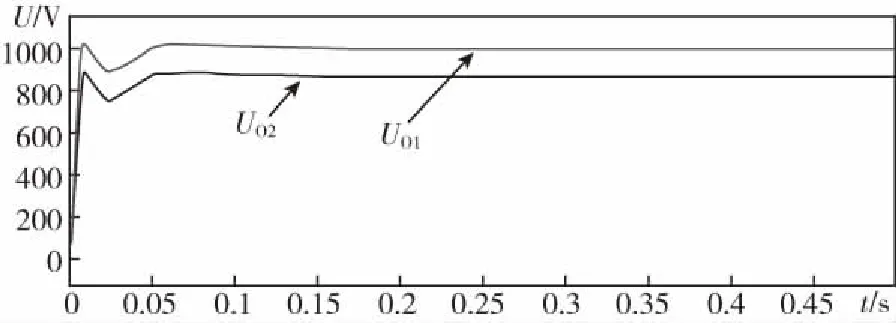
图6 采用传统下垂均压控制策略模块2的输入激励突变为650 V时电压波形图Fig.6 Voltage waveform when input voltage breaks to 650 V without adopting improved droop voltage equalizing control strategy module 2
不采取均压策略时,当模块2输入电压突降为700 V时,图7的电压波形的趋势与图6大致相同,只不过0.05 s后,模块2的输出电压电压稳定在920 V左右,但依然未能完成均压。
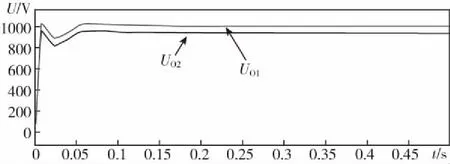
图7 采用传统下垂均压控制策略模块2的输入激励突变为700 V时电压波形图Fig.7 Voltage waveform when input voltage breaks to 700 V without adopting improved droop voltage equalizing control strategy module 2
根据图8的仿真波形,当系统投入均压策略时,模块2的输入电压突降为650 V,在0.01 s模块2电压峰值接近1 000 V,在0.05 s后模块1和模块2的电压双双稳定在1 000 V上下,说明补偿下垂均压控制策略起了作用,达到了一定效果。
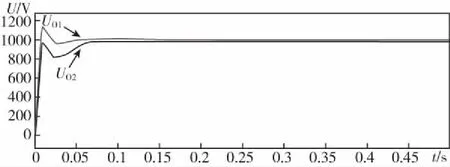
图8 采用改良补足下垂均压控制策略模块2的输入激励突变为650 V时电压波形图Fig.8 Voltage waveform when input voltage breaks to 650 V adopting improved droop voltage equalizing control strategy module 2
图9的电压波形是在模块2输入电压突变为700 V,投入均压策略后两个模块的输出电压波形图,可以看出在0.055 s后模块1和模块2的输出电压都稳定在1 000 V左右。
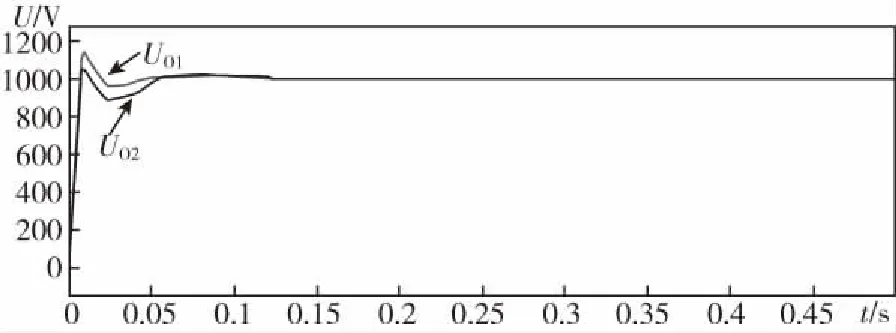
图9 采用改良补足下垂均压控制策略模块2的输入激励突变为700 V时电压波形图Fig.9 Voltage waveform when input voltage breaks to 700Vadopting improved droop voltage equalizing control strategy module 2
如波形所示,当IPOS变换器没有采用改良下垂控制的均压策略,输入电压在由于某种原因发生突变时,比如由原来正常的750 V下降到700 V甚至是650 V,各个模块的输出端就难以完成均压,故障模块的输出电压也会相应的发生突变,影响系统的正常工作。
但是当投入均压控制策略之后,通过仿真实验的结果可以清晰的看出,各个模块的输出侧能够出色的完成均压任务,保证整个系统正常稳定的运行。
4.2 模块故障(变压器变比发生突变)时改良下垂均压控制策略仿真结果
图10是当模块2 内部发生故障,原副边变比突变为0.5时,没有投入均压策略时,两模块输出电压波形图,通过仿真结果可以看出,故障后模块2的电压突升,0.05 s后稳定在1 200 V左右,而模块1的输出电压则稳定在1 000 V左右,系统没有完成均压。
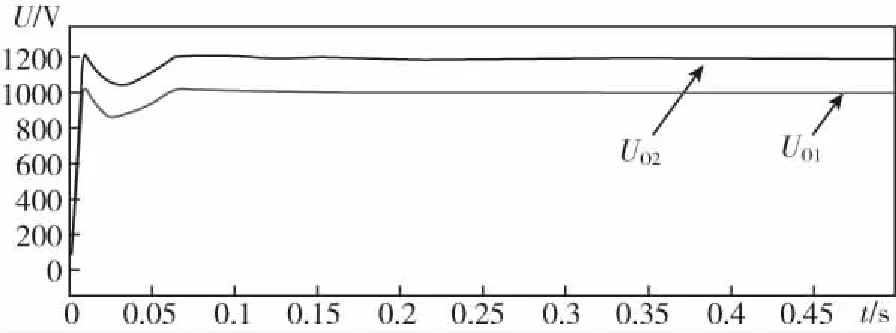
图10 不采用改良下垂均压控制策略模块2的原副边变比突变为0.5时电压波形图Fig.10 Voltage waveform when the original side ratio changes to 0.5 without adopting improved droop voltage equalizing control strategy module 2
当投入均压控制策略时,如图11的仿真结果所示,模块2的输出电压虽然突升至1 200 V,但是在(0.02-0.05) s间下降到980 V左右,在0.1 s左右稳定在1 000 V,模块1则在0.05 s就稳定在1 000 V,最终完成均压,系统稳定运行。

图11 采用改良下垂均压控制策略模块2的原副边变比突变为0.5时电压波形图Fig.11 Voltage waveform when the original side ratio changes to 0.5 adopting improved droop voltage equalizing control strategy module 2
通过仿真实验的结果来看,当IPOS变换器没有采用改良下垂控制的均压策略时,子模块内发生某种故障,比如隔离变压器的变比突然发生变化,各个模块的输出电压就难以完成均压,故障模块的输出电压也会相应的发生突变,影响系统的正常工作。
但是当我们投入均压控制策略之后,通过仿真实验的结果我们可以清晰的看出,各个模块的输出侧能够出色的完成均压任务,保证整个系统正常稳定的运行。
5 结论
本文研究分析了一种以移相全桥电路为子模块的模块化IPOS组合DC-DC变换器,进行了独立电路的原理分析,多电路组合的控制方法合理性分析,结合小信号模型对采用该策略的系统进行了稳定性分析,并通过仿真对IPOS组合变换器及其均压控制策略的可行性进行验证。
仿真结果表明,研究提出的IPOS组合变换器及控制策略具有如下主要特点:适用于低压大电流输入,高压宽范围输出的应用场合。子模块各自独立,模块化程度高,拓展性好,稳定性,抗故障能力高。采用补偿的改进下垂均压控制策略,使串联输出电压精度高,调整率好。采样、控制与通信均在串联侧完成,无需额外的隔离采样等附加电路,简化了系统结构,具有较好的工程应用价值。在输入电压突变和模块出现故障的情况下能够稳定的完成输出侧的均压任务,使系统正常稳定的运行。
猜你喜欢
中学生数理化·八年级物理人教版(2021年9期)2021-11-20 06:00:28
攀枝花学院学报(2021年5期)2021-10-19 02:52:58
能源工程(2020年6期)2021-01-26 00:55:22
大学物理(2021年2期)2021-01-25 03:26:18
山东冶金(2019年3期)2019-07-10 00:54:04
消费导刊(2018年10期)2018-08-20 02:57:02
大陆桥视野·下(2017年9期)2017-09-17 15:11:21
通信电源技术(2016年1期)2016-04-16 04:57:26
电测与仪表(2016年4期)2016-04-11 09:48:06
铁道科学与工程学报(2015年4期)2015-12-24 12:11:25