
A criterion based adaptive RSIC scheme in underwater communication
2021-05-22 13:30KHANMdRizwanDASBikramadityaandPATIBibhutiBhusan
KHAN Md Rizwan ,DAS Bikramaditya,* ,and PATI Bibhuti Bhusan
1.Department of Electronics and Telecommunication Engineering,Veer Surendra Sai University of Technology,Burla 768018,India;2.Department of Electrical Engineering,Veer Surendra Sai University of Technology,Burla 768018,India
Abstract: Multi-access interference (MAI) is the main source limiting the capacity and quality of the multiple-input multipleoutput orthogonal frequency division multiplexing (MIMO-OFDM)system which fulfills the demand of high-speed transmission rate and high quality of service for future underwater acoustic (UWA)communication.Therefore,multi-user detection (MUD) is needed at the receiver of the MIMO-OFDM system to suppress the effect of MAI.In this research,MUD is achieved by using a criterion based adaptive recursive successive interference cancellation (RSIC) scheme at the receiver of a MIMO-OFDM system whose transceiver model in underwater communication is implemented by using the Bellhop simulation system.The proposed scheme estimates and eliminates the MAI through user signal detection and subtraction from received signals at the receiver of the MIMO-OFDM system in underwater environment.The bit error rate (BER) performance of the proposed scheme is analyzed by using weight filtering and weight selection criteria.By Matlab simulation,it is shown that the BER performance of the proposed scheme outperforms the conventional matched filter(MF) detector,the adaptive successive interference cancellation(SIC) scheme,and the adaptive RSIC scheme in the UWA network.
Keywords:underwater acoustic (UWA),orthogonal frequency division multiplexing (OFDM),multi-user detection (MUD),multiaccess interference (MAI),recursive successive interference cancellation (RSIC).
1.Introduction
Acoustic communication is the dominant technology over radio and optical communication for long distance wireless communication in underwater environment.The need for long distance and high quality communication arises at ocean stations to collect scientific data,in environmental monitoring to exchange data between sensor nodes,and in off-shore oil exploration for autonomous underwater vehicles (AUVs) [1,2].Intersymbol interference (ISI) due to multipath effect [3,4],limited band-width due to low frequency propagation of acoustic waves,power control inefficiency due to power variation at the receiver [5],and multi-access interference (MAI)due to the interference from co-channel users in the multiuser environment are the challenging factors in underwater acoustic (UWA) communication.
Orthogonal frequency division multiplexing (OFDM)which has been used in multiband [6],when implemented with multiple-input multiple-output (MIMO) system,provides a low-complexity solution towards limited bandwidth and ISI problem to enhance the data rate performance and spectral efficiency [7].However,at the receiver of the MIMO-OFDM system,MAI is considered as the main source limiting the system capacity.Therefore,multi-user detection (MUD) is needed to improve the performance of the MIMO-OFDM system in UWA communication.
A wide range of research has been carried out in UWA communication on canceling the effects of ISI,MAI,and power control towards MUD.A special kind of code division multiple access (CDMA) technology called the OFDM-CDMA technique was implemented in [8]to combat the effect of ISI and MAI in UWA communication but at the expense of transmission loss due to spreading code.The direct sequence-CDMA (DS-CDMA) technique using Zadoff-Chu sequence and a complementary set of sequences (CSS) was implemented in [9]which resulted in an accuracy of 98% in detection and identification of users in the multicarrier environment in UWA communication.The Kalman filter-based blind adaptive multiuser detection (KF-BAMUD) algorithm was implemented in [10,11]to combat the effect of ISI and MAI in the scenario of static users in underwater multiuser communication.The KF-BAMUD algorithm does not perform well due to the variable Doppler shift between the transducer and hydrophone of the expected user.In [12],the Kalman filter-based chip differential blind adaptive multiuser detection (D-KF-BAMUD) algorithm was used to combat the effect of MAI,ISI,and Doppler shift effectively in underwater multi-user communication.
To address ISI,MAI,and power control inefficiency towards MUD in UWA communication,researchers have implemented another group of MUD strategies schemes such as parallel interference cancellation (PIC) [13],successive interference cancellation (SIC) [14,15],and recursive SIC (RSIC) [16,17].These schemes mainly depend on the power levels of separate users at the receiver.PIC schemes are applicable for users with equal power levels at the receiver whereas SIC and RSIC schemes are applicable for users with variant power levels at the receiver.The PIC scheme cancels interference from other users all at a time whereas SIC and RSIC schemes cancel interference from other users sequentially.The RSIC scheme not only considers the power variation at the receiver but also considers MAI from weaker users on strongest users.
The novelty in this article is that MAI cancellation along with switching between equal and unequal power is carried out by using a criterion based adaptive RSIC scheme at the receiver of a MIMO-OFDM system in UWA communication.MAI suppression at the receiver of a MIMO-OFDM system in UWA communication is achieved through symbol regeneration and subtraction from the received signal.The weight updation using the least mean square (LMS) algorithm in the criterion based adaptive RSIC scheme depends on weight selection and weight filtering criteria.By Matlab simulation,it is shown that the proposed scheme gives a superior bit error rate (BER) performance towards MUD over existing adaptive SIC and adaptive RSIC methods [17]in UWA communication.
The rest of this paper is organized as follows:the problem statement is formulated in Section 2.Section 3 describes the proposed criterion based adaptive RSIC scheme at the receiver of the MIMO-OFDM system to suppress the effect of MAI.Section 4 demonstrates results and discussion to illustrate the effectiveness of the criterion based adaptive RSIC scheme over the conventional matchd filter (MF) detector and existing adaptive methods in the UWA communication.Concluding remarks are drawn finally in Section 5.
2.Problem formulation
Consider an underwater MIMO-OFDM system shared bysusers wheres∈ 1,2,3,···,Sequipped withStransmitting andLreceiving antennas as shown in Fig.1 and Fig.2.The frequency band is divided intomsubcarriers wherem∈ 1,2,3,···,M.The channel matrix for MIMO channel impulse response forsusers in underwater is represented as
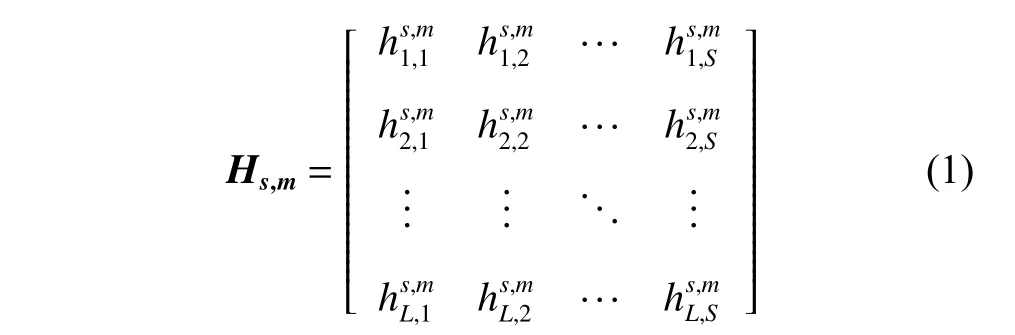
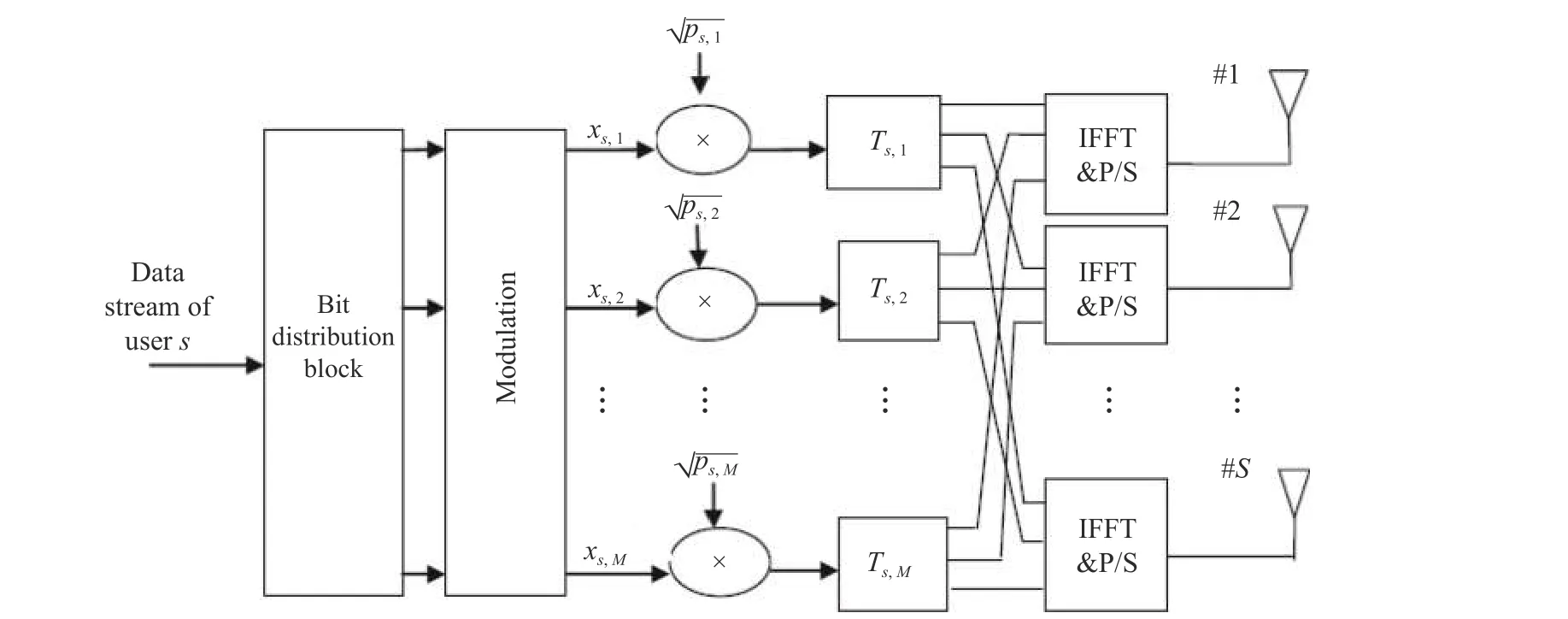
Fig.1 Transmitter structure for underwater MIMO-OFDM system
The underwater channel impulse response is considered as MIMO channel impulse response which is further decomposed into a number of parallel spatial channels using singular value decomposition (SVD).Therefore the channel matrixHis decomposed by using SVD as in [18]and is represented as

whereuqandvqrepresent the left singular and right singular vectors respectively and the columns ofUandVare orthonormal.dqrepresents the diagonal matrix containing singular values which are nonnegative and are arranged in a descending order of magnitude. H in the power ofvqrepresents the Hermitian operator.The number of non zero singular value determines the rank of the matrix.
In the transmitter section,the data stream for each user is segmented intomparallel streams by using bit distribution block as shown in Fig.1.The symbol sequencesxs,1,xs,2,···,xs,Mare generated at the output of bit distribution block from modulated data streams.These symbol sequences are transmitted throughSantennas usingmsubcarriers.Before transmitting throughSantennas,the symbol sequences are converted by an inverse fast Fourier transform (IFFT) operation to the required OFDM symbol in the spatial domain.
These segmented OFDM symbols are then converted from parallel to serial by using the P/S operation.
In the receiver section in Fig.2,an estimate of the transmitted symbols is represented asfor all subcarriersm.Before the estimation of transmitted symbols,the received OFDM symbols are segmented from serial to parallel by using S/P operation,then the inverse operation is made where the OFDM symbols are converted back to the frequency domain by fast Fourier transform (FFT).The despreaded signal at the receiver side is obtained by correlating the received signal with every user’s spatial signature using spatial multiplexing.MUD is used to estimate the transmitted signal for all users along with suppression of MAI and minimizing the probability of bit errors.
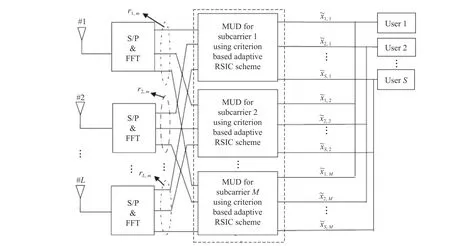
Fig.2 Receiver structure for underwater MIMO-OFDM system
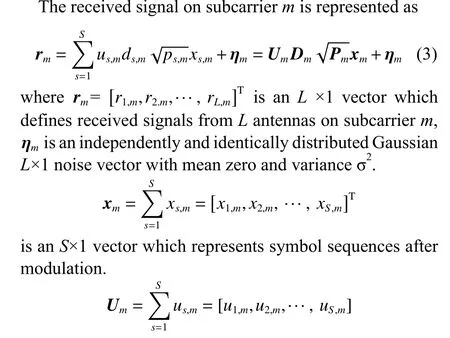
At the output of the MF,the received symbol for user 1 on subcarriermis expressed as
Thus the output from a conventional MF detector consists of the desired signal and MAI from co-channel users.To mitigate the effect of MAI from the desired signal,a criterion based adaptive RSIC scheme is proposed in this research for underwater environment.
3.The proposed criterion based adaptive RSIC scheme
The proposed criterion based adaptive RSIC scheme at the receiver cancels the MAI through signal detection and subtraction from individual subcarriers as shown in Fig.3,and the generated outputs are combined to form the decision statistic.The MAI cancellation through signal detection and subtraction from individual subcarriers is also explained in Algorithm 1.
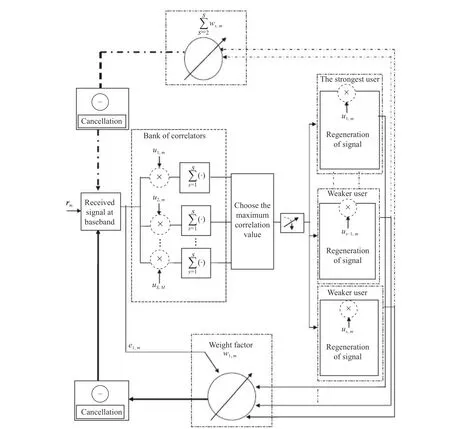
Fig.3 The proposed scheme at receiver of MIMO-OFDM system (user 1)
Algorithm 1Algorithm for the criterion based adaptive RSIC scheme for the strongest user (user 1).
Step 1The correlation values from bank of correlators using (4) are passed on to the selector to determine the strongest correlation value.
Step 2Select the user with the strongest correlation value for decoding by using user’s spatial signature.
Step 3The user signal is regenerated,weights are adapted by using weight selection and weight filtering criterion explained in (10) and (13).
Step 4The user signal is subtracted/cancelled from the received signal.
Step 5The subtracted received signal is passed for weaker user decoding.
Step 6This process (Step 1 to Step 5) can be repeated until the weakest user is decoded.
Step 7The decoded users of 2,···,Sare used to regenerate the signal to be summed and cancelled from the received signal.
Consider user 1 as the strongest user for the criterion based adaptive RSIC scheme represented in Fig.3 and in Algorithm 1.
The received signal from (3) is represented as
The strongest correlation value for user 1 will be determined at the output of bank of correlators using (5).The user signal for user 1 will be regenerated using spatial signatureu1,mas shown in Fig.3.Then the regenerated signal for user 1 which is treated as the strongest user can be expressed as
which must be zero for next user detection achieved through weight updation adaptively.The weight updation depends on weight selection and weight filtering criterion.is anL×1 error vector.
From (9),it is observed that the error signal will be zero by considering the ideal condition.Thus the weight selection criterion is expressed as

The weight update equation in the proposed scheme is expressed as

whereμ1,mrepresents the step size andrepresents the regenerated symbol.
The algorithm that follows the above weight update equation is known as the adaptive LMS algorithm.
System performance depends on the number of weight updation.In our analysis,the weight factorw1,mis updated forMsubcarriers to completely subtract the strongest user (user 1) from the received signal.If the magnitude ofafter regeneration will be sufficient for a user to exceed the predefined threshold,then the weight corresponding to the symbol is deactivated so that system performance will increase.Thus a step size selection criterion is given below:

where ζmis called the normalized threshold value.
Further,the magnitudes of the weight factor must lie withinfor reliable cancellation.Any variation beyond this range will be controlled by using weight filtering criterion which is mathematically expressed as

where ζh,mand ζl,mrepresent the higher and lower threshold values for the magnitude of the weight factor respectively and ϕFrepresents the weight filtering function.
As per weight filtering criterion,if a weight is greater than the higher threshold value,then it is mapped intoand if a weight is less than the lower threshold value,then it is mapped intoBetween the two threshold values,the intermediate value remains unchanged.
3.1 Convergence of weight adaptation in the proposed scheme
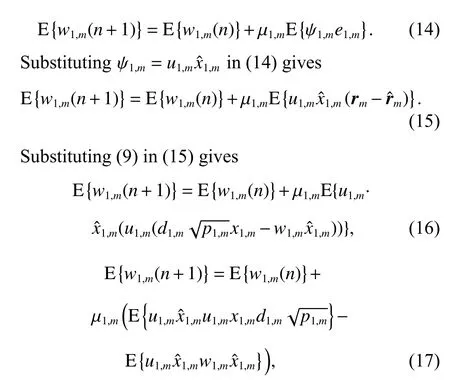
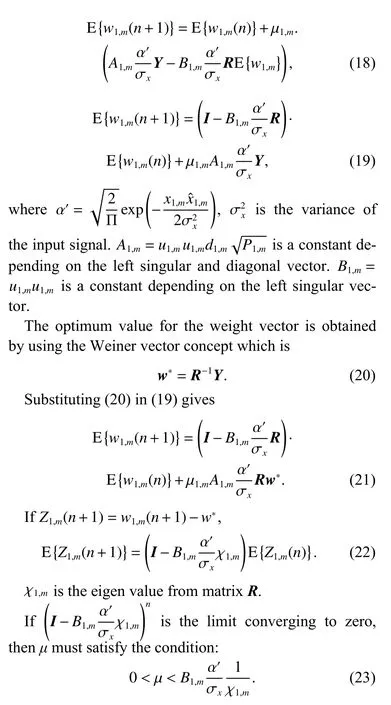
Taking expectation on both sides of (11) results in
3.2 BER of weight adaptation in the proposed scheme
4.Results and discussion
4.1 Simulation parameters
An underwater network is set up by using the Bellhop simulation system but the simulations and the data analysis are performed for MUD at the receiver of the MIMO-OFDM system by using Matlab.Table 1 lists the parameters used to set up an underwater network.Further,the same parameter values are used for simulations and data analysis by using Matlab.
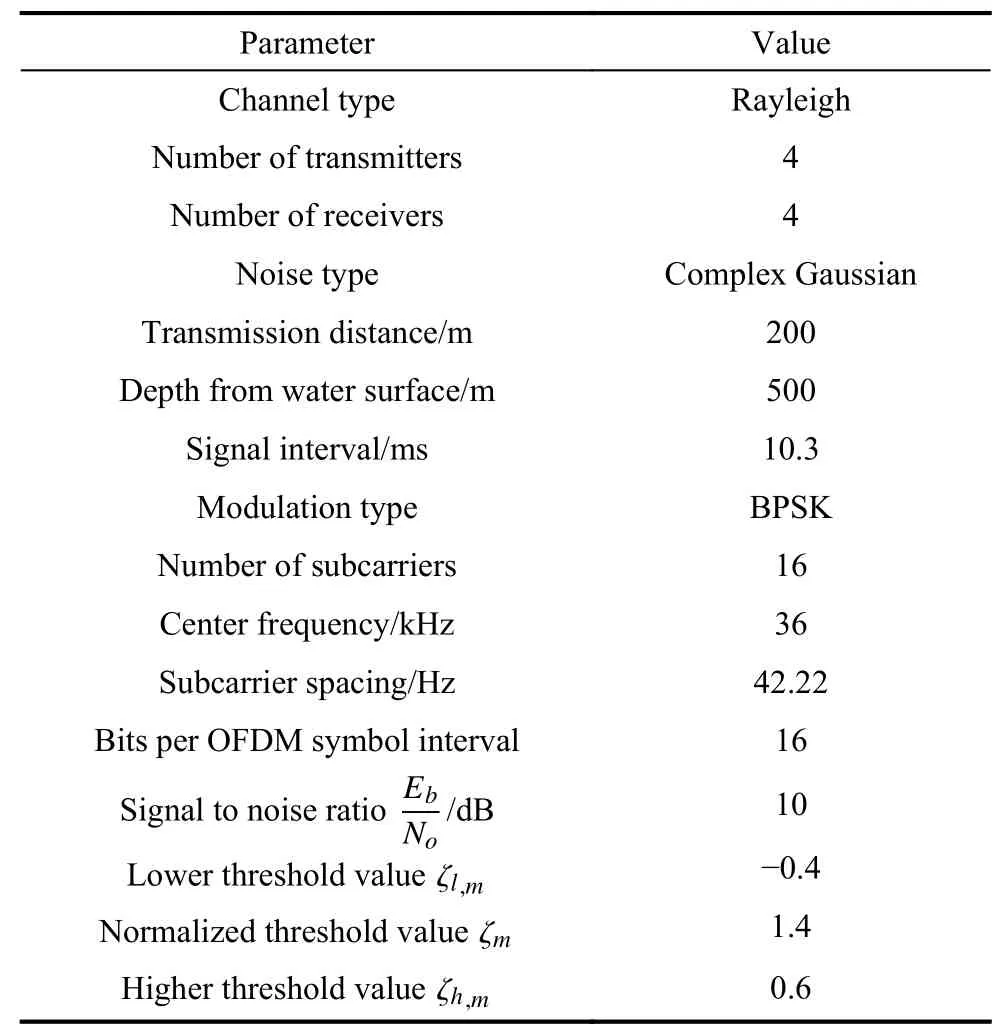
Table 1 Parameters for underwater network
4.2 Simulation results
In this section,the effectiveness of the proposed criterion based adaptive RSIC scheme is demonstrated through simulation results.In the first set of simulation,the BER performance of the proposed scheme is evaluated by using weight filtering only.In the second set of simulations,the BER performance is improved by using both weight selection and weight filtering criteria.Finally,the BER performance of the proposed scheme as a function of correlation amplitude and number of users is evaluated and compared with conventional detectors and existing adaptive SIC and adaptive RSIC schemes.
In Fig.4,the proposed receiver scheme is evaluated by using weight filtering only.In order to apply weight filtering,the condition ofwithout weight selection criteria is considered initially.The BER performance as a function of the higher threshold value ζh,mof the proposed scheme is illustrated.The value of the step size is normalized by usingThe BER performance of the proposed scheme increases with the increase in the step size.The BER performance of the proposed scheme increases from 4.4×10−1to 4.0×10−3,0.2×10−1to 3.8×10−3,and 0.15×10−1to 3.7×10−3as a function of ζh,mfor the step size 0.016,0.032,and 0.052 respectively.This increase in BER performance is achieved till the value of ζh,mis equal to 0.5 as shown in Fig.4.
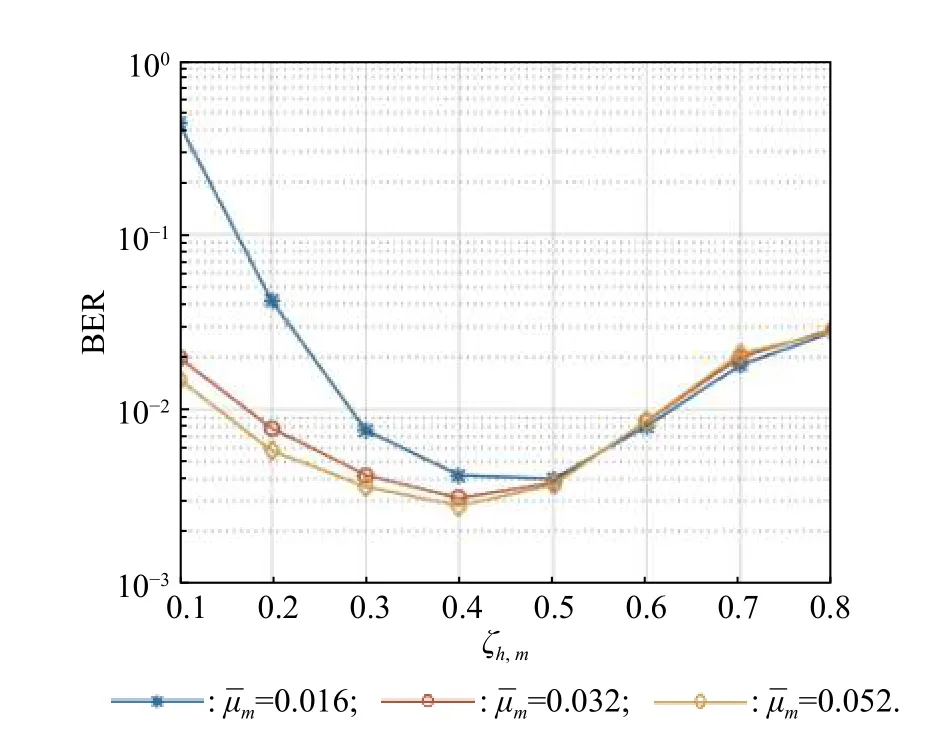
Fig.4 The proposed scheme through weight filtering
When the value of the higher threshold value ζh,mis higher than 0.5,the proposed scheme does not provide a gain in BER performance even for an increasing step size from 0.016 to 0.052 as shown in Fig.4.This is due to over adapted weights which are further handled through both weight filtering and weight selection criteria described in (13) and (10) respectively.From Fig.4,the weight filtering scheme for ζh,m<0.5 is observed successfully as for ζh,m<0.5 the BER decreases with an increase in the step size,which results in proper weight adaption and the strongest signal subtraction.Further to improve BER performance,both weight selection and weight filtering criteria are adapted in Fig.5.
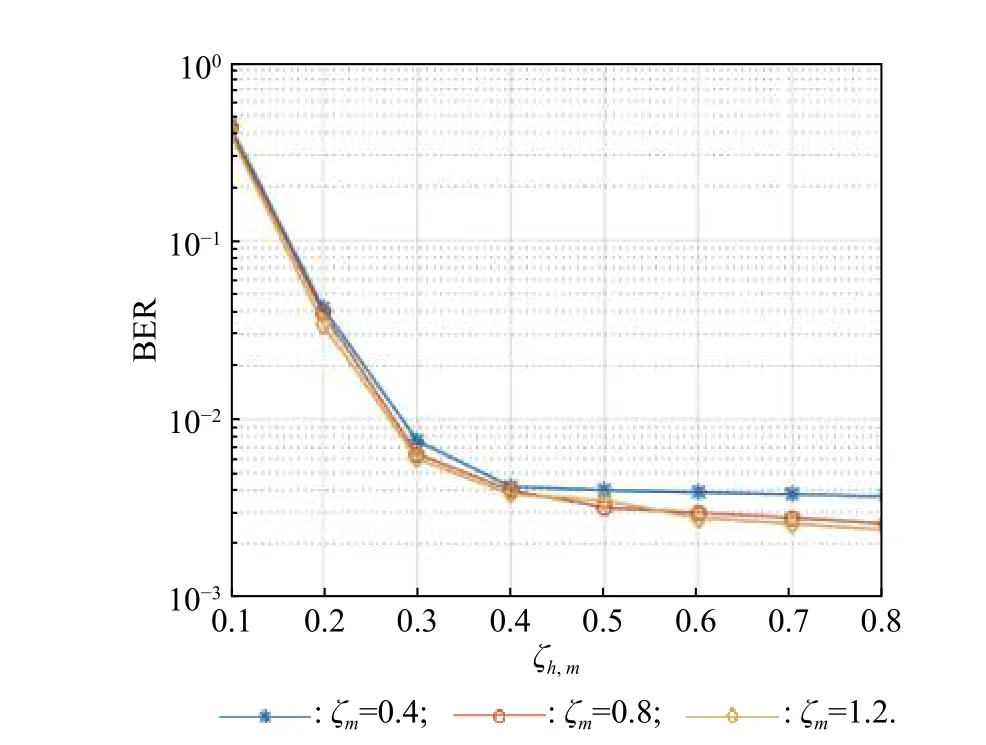
Fig.5 Performance of the proposed scheme through weight selection and weight filtering
The BER performance as a function of ζh,mfor different normalized threshold values ζmas explained in (12) is illustrated in Fig.5.It is observed that the BER performance increases when the normalized threshold value ζmincreases from 0.4 to 1.2.This increase in BER performance is due to weight updation in (18).The BER of the proposed scheme decreases from 4×10−1to 3.7×10−3for ζm=0.4,4.2×10−1to 2.6×10−3for ζm=0.8,and 4.0×10−1to 2.4×10−3for ζm=1.2 as a function of the higher threshold value ζh,m.
From Fig.4 and Fig.5,it is observed that the BER performance of the proposed scheme by considering both weight selection and weight filtering criteria is better compared to the BER performance of the proposed scheme by considering only the weight filtering scheme as shown in Fig.4 and the BER performance comparison is also highlighted in Table 2.
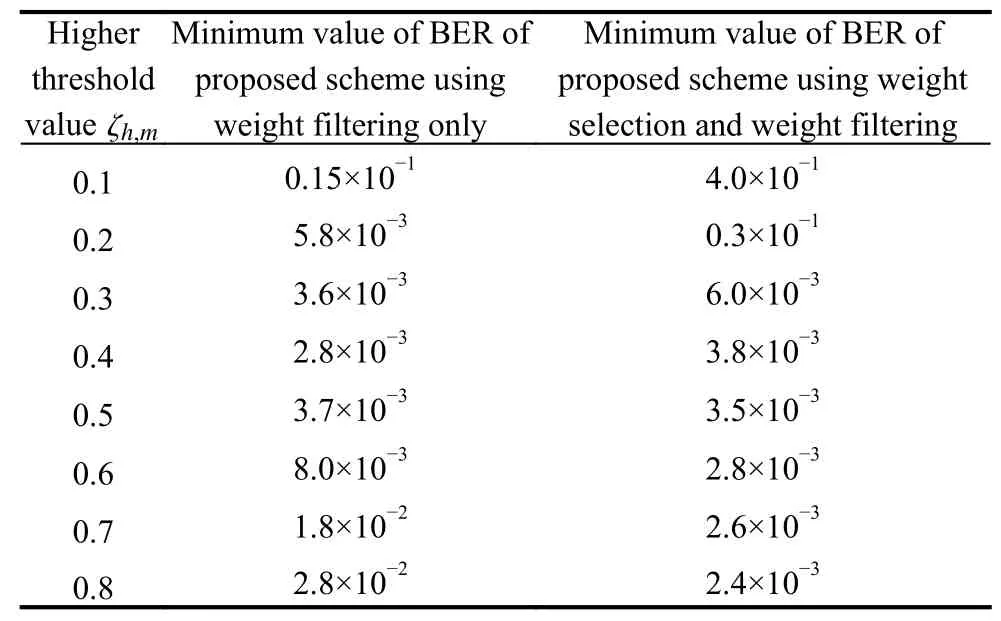
Table 2 Minimum BER of the proposed scheme as a function of higher threshold value ζh , m
In Fig.6,the BER performance of the proposed scheme as a function of correlation amplitude is evaluated and compared with that of the conventional MF detector,the adaptive SIC scheme,and the adaptive RSIC scheme.The BER of the conventional MF detector,the adaptive SIC scheme,the adaptive RSIC scheme,and the proposed scheme increases from 9.4×10−3to 63×10−3,9.3×10−3to 27×10−3,9×10−3to 20×10−3,and 9×10−3to 17×10−3respectively.It is observed that BER in all schemes increases.This is due to an increase in MAI with the increase in correlation amplitude.Finally,from the simulation result,it is obtained that the proposed scheme performs better over the conventional MF detector,the adaptive SIC scheme,and the adaptive RSIC scheme.Previously adaptive SIC and adaptive RSIC schemes described in [17]cancel the MAI from both strong and weak users but the proposed scheme will perform better due to reliable weight selection and filtering scheme.
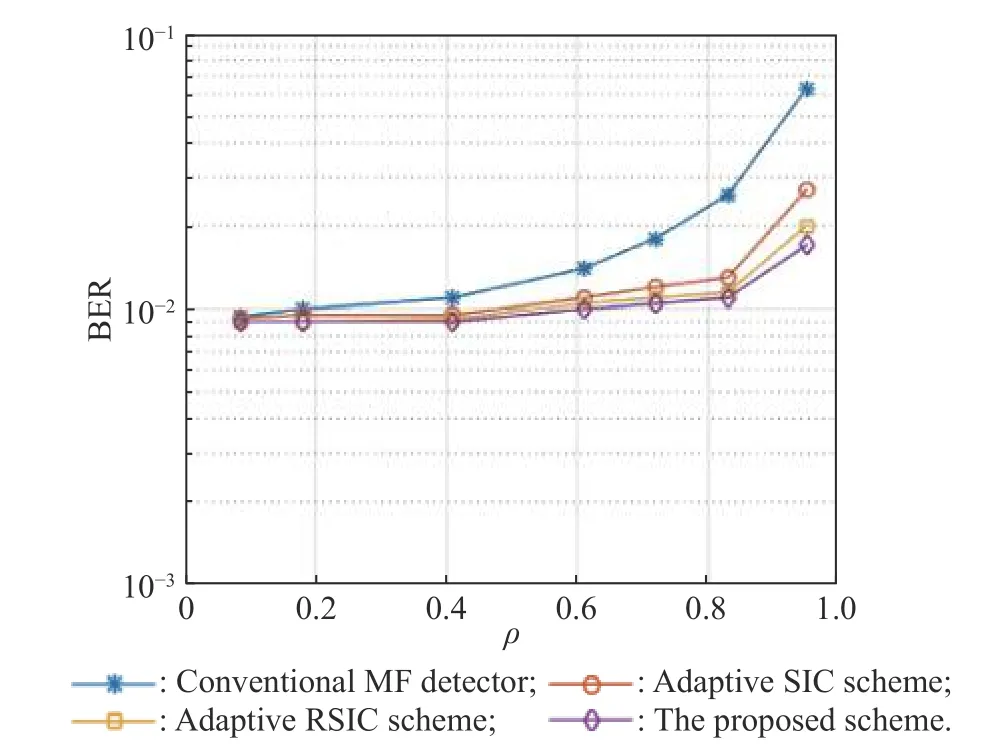
Fig.6 Performance of the proposed scheme as a function of correlation amplitude ρ
In Fig.7,the BER performance of the proposed scheme as a function of a number of users is evaluated and compared with that of the conventional MF detector,the adaptive SIC scheme,and the adaptive RSIC scheme.The BER of the conventional MF detector,the adaptive SIC scheme,the adaptive RSIC scheme,and the proposed scheme increases from 9×10−3to 38×10−3,7×10−3to 34×10−3,6.5×10−3to 32×10−3,and 6.3×10−3to 26×10−3respectively as a function of a number of users.It is observed that BER increases with the increase of the number of users in all schemes.This is due to an increase in MAI with the correlation value which increases with the increase of the number of users.From the simulation result,it is obtained that the proposed scheme performs better over the conventional MF detector,the adaptive SIC scheme,and the adaptive RSIC scheme.The proposed scheme outperforms as it cancels the MAI from both strong and weak users due to reliable weight selection and filtering scheme.
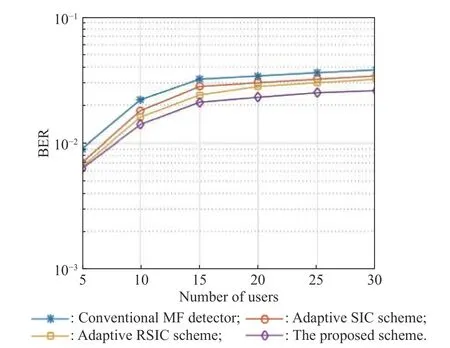
Fig.7 Performance of the proposed scheme as a function of number of users
5.Conclusions
This paper investigates estimation of user signals by using a criterion based adaptive RSIC scheme.It is observed that the proposed scheme is an efficient MUD strategy in terms of power control and MAI mitigation in an underwater network.However,processing complexity is high.The proposed MUD with an efficient MIMO-OFDM system will fulfill the demand such as video processing,image processing and high speed reliable communication in underwater environment.
 Journal of Systems Engineering and Electronics2021年2期
Journal of Systems Engineering and Electronics2021年2期
- Journal of Systems Engineering and Electronics的其它文章
- Data-driven evolutionary sampling optimization for expensive problems
- A dual population multi-operator genetic algorithm for flight deck operations scheduling problem
- Observation scheduling problem for AEOS with a comprehensive task clustering
- An improved estimation of distribution algorithm for multi-compartment electric vehicle routing problem
- VCR-LFM-BPSK signal design for countering advanced interception technologies
- RFC:a feature selection algorithm for software defect prediction