运维交通船登乘过程波浪补偿策略研究
2021-05-21 09:00贾传宝
海峡科学 2021年3期
贾传宝
(福建省新能海上风电研发中心有限公司,福建 福州 350108)
当前,我国海上风电行业迅猛发展,海上风电场的规模和装机容量也越来越大,海上风电场的运行和维护工作越来越受到重视。但由于海上风电场的海况十分恶劣,受到风、浪、流的影响,使得运维交通船的可达性受限。尤其是当运维交通船登靠风电机时,船舶横摇、纵摇十分剧烈,使得运维技术人员登乘风机变得十分困难[1]。此外,海上风机基础平台没有统一的靠泊结构,与船舶连接的部件不统一,导致作业人员登乘过程更加困难。
1 海上风电运维交通船主要靠泊方式
目前,国内海上风电运维交通船主要有单体船、双体船等两种船型。其中单体船大多采用侧靠方式,受波浪影响严重,靠泊能力差;双体船大多采用顶靠方式,主要依靠船艏橡胶与靠泊结构的摩擦力,保证船舶的稳定性。以上两种靠泊方式,在受到浪流或者大风影响时,船舶会发生较大程度的摇摆,变得很不稳定,人员登乘风机的安全风险很大。
为了解决运维人员登乘风机过程中的安全问题,在欧洲,已研制出专业化的波浪补偿装置。该装置主要是解决人员登靠过程中船舶稳定性问题,可以更好地保护作业人员安全,同时增加船舶可出海作业窗口时间,很大程度上提高了风电场运维效率。
2 解决运维交通船登乘问题的策略
运维交通船在人员登乘过程中产生危险的原因,主要是由于船舶受环境因素影响发生的横摇与纵摇,影响登乘通道的平稳性,如何解决稳定性问题是解决登靠问题的核心[2]。
根据近年来对海上风电运维船舶的研究,考虑在船舶上增设一套专用登乘装置,进行波浪补偿,用于减少船舶在横摇、纵摇时对登乘人员造成的不利影响,确保人员可以安全登上海上风机。

图1 海上风电运维波浪补偿装置
该结构可以改善运维人员登乘风机的条件,栈桥连接风机基础,船舶横摇时,栈桥可通过水平转动轴使得步桥保持固定;当船舶水平位移时,栈桥可通过垂直铰链使得步桥保持固定;当船舶深沉时,步桥可通过水平铰链使得步桥与船舶保持连接,使得栈桥与风机相对静止,形成一个相对固定的登乘通道,对海上波浪进行补偿,保证人员登乘安全。
2.1 登乘装置系统组成
登乘装置主要由主控单元、电源、姿态传感器、控制按钮、报警指示灯、触摸屏组成,系统原理图见图2。
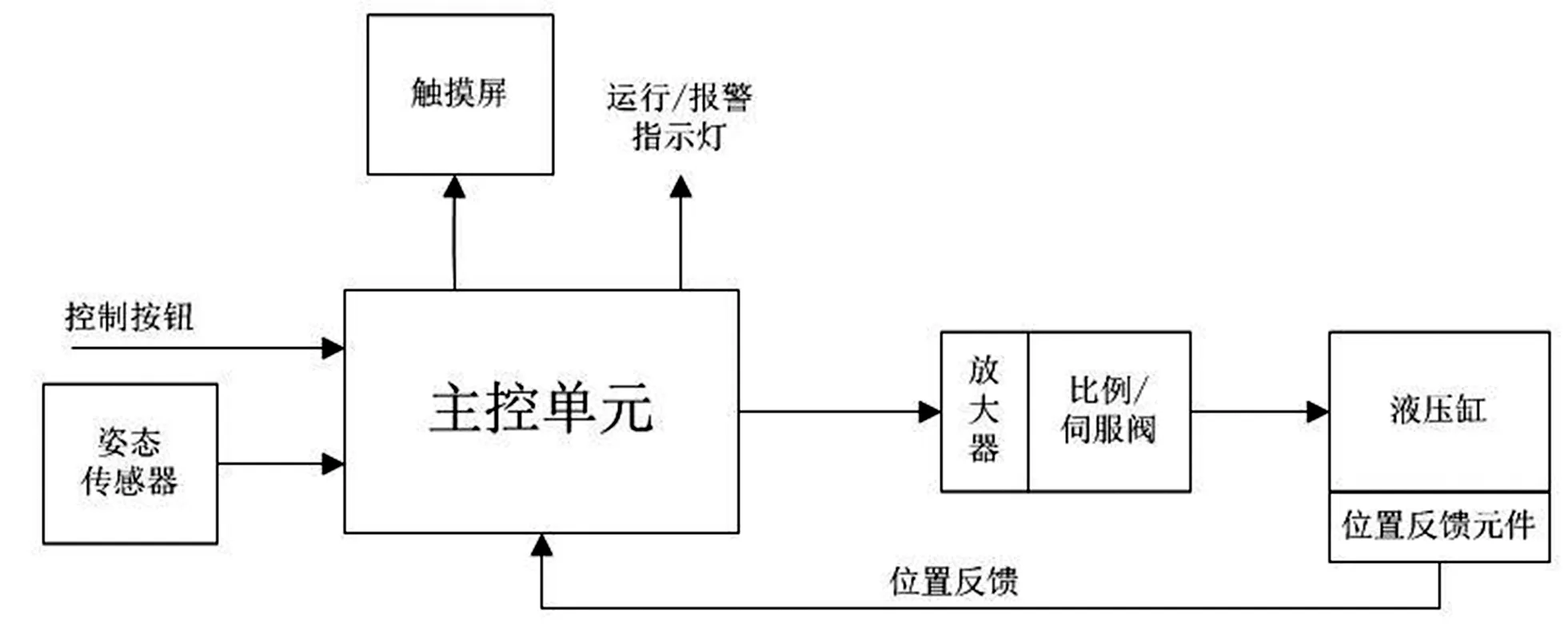
图2 系统原理图
其中,主控制单元负责接收姿态传感器的舰船纵摇、横摇、深沉信息,通过软件计算对登靠系统的稳定平台进行主动补偿,接收液压缸位置反馈元件,对稳定平台进行闭环控制,使稳定平台位置稳定,保证人员安全登上海上风电塔。姿态传感器安装在稳定平台跳板底座下方,用于感知舰船的姿态信息。每隔一定时间向控制单元传送舰船的纵摇、横摇和升沉信息。显示屏用于显示系统状态,如各个液压缸的位置、舰船的姿态信息、工作模式等信息。
在主动补偿过程中,系统通过接收到的纵摇、深沉信息和需要使稳定平台稳定的目标位置,反求出俯仰缸和伸缩缸的位置伸缩量。随后,控制器发出位置指令,并通过液压缸的位置反馈元件对伺服阀进行位置的PID闭环控制,使栈桥稳定在目标位置。
2.2 姿态理论计算
2.2.1 横摇补偿
首先对船舶横摇运动过程进行建模,假设:横摇支点到横向补偿油缸与登乘装置连接点的距离为L1,横摇支点到横向补偿油缸与登乘装置连接点的距离为L2,横向补偿油缸初始长度为L3,油缸行程为d1,模型如图3所示。

图3 横摇补偿示意图
其中:船舶在水平状态下,L1与L2之间初始角度值为θ1。横摇角γ1和角α1在运动过程中,相对大小是固定关系,如下:
α1=γ1+θ1
(1)
式(1)中,α1为使稳定支架保持横摇水平的角度,角α1可以通过三角形的三条边长计算得出,公式如下:
(L3+d1)2=L12+L22-2L1L2cosα1
由此得到液压缸的行程量,公式如下:
(2)
2.2.2 纵摇及升沉补偿
对船舶纵摇及升沉运动进行建模,假设:纵摇支点到栈桥与主体结构连接点距离为L4,纵摇补偿油缸和栈桥与登乘装置各自连接点之间距离为L5,栈桥与登乘装置和纵摇补偿油缸连接点之间距离为L6,纵摇补偿油缸初始长度为L7,栈桥初始长度为L8,纵摇补偿油缸行程为d2,栈桥行程为d3,模型如图4所示。

图4 纵摇及升沉补偿示意图
以传感器安装点A点为原点,建立坐标系,则B点坐标可以按下式计算:
(Bx,By)=(L4cos(α2-θ2),L4sin(α2-θ2))
(3)
式(3)中,L4为稳定支架距离传感器的高度;α2为AB与舰船甲板的夹角;θ2为纵摇角。
BC与水平面的夹角γ2可以计算出:
γ2=180°-α2-β1+θ2
其中,β1由余弦定理解三角形计算得出:
(L7+d2)2=L52+L62-2L5L6cosβ1
因此,C点坐标为:
(Cx,Cy)=(L4cos(α2-θ2)+(L8+d3)cosγ2,
L4sin(α2-θ2)+(L8+d3)sinγ2)
(4)
式中,L8为BC的距离,稳定平台的长度。
在实际工作过程中,A、B、C点纵坐标还要加上升沉量。
实际工作中,系统处于自动调整状态,此时可以调整液压缸d2和d3,并实时计算C点的坐标,然后系统进入稳定工作状态,此时记录下C点的坐标(Cx0,Cy0)作为稳定目标,并进行补偿,方法如下:
当船由于纵摇以及升沉导致C点变化时,通过液压缸d2的变化来调整β1角,并通过液压缸d3来调整梯子的长度,梯子末端的运动范围如图5中虚线所示。

图5 纵摇补偿及升沉补偿范围
其中,设A点升沉为h,则B点的坐标可按下式计算:
(Bx,By)=(L4cos(α2-θ2),L4sin(α2-θ2)+h)
C点坐标取稳定开始的初始值(Cx0,Cy0),
可以求得:
β1=180°-α2-γ2+θ2
(5)
(6)
为了保证稳定平台横摇与水平面水平,可以根据式(2)求出横摇轴的位移量d1;为了保证稳定平台稳定在某一点,可以根据式(5)、(6)求出俯仰轴和伸缩轴的位移量d2,d3。
3 模拟实验
3.1 横摇、纵摇测试
为验证登乘装置的精度,需对控制系统进行模拟实验。首先进行传感器安装,固定转台俯仰轴,使转台横摇在±8°范围内运动,得出转台角度与传感器测得的姿态值,计算出偏差值即为传感器的精度,结果见表1。
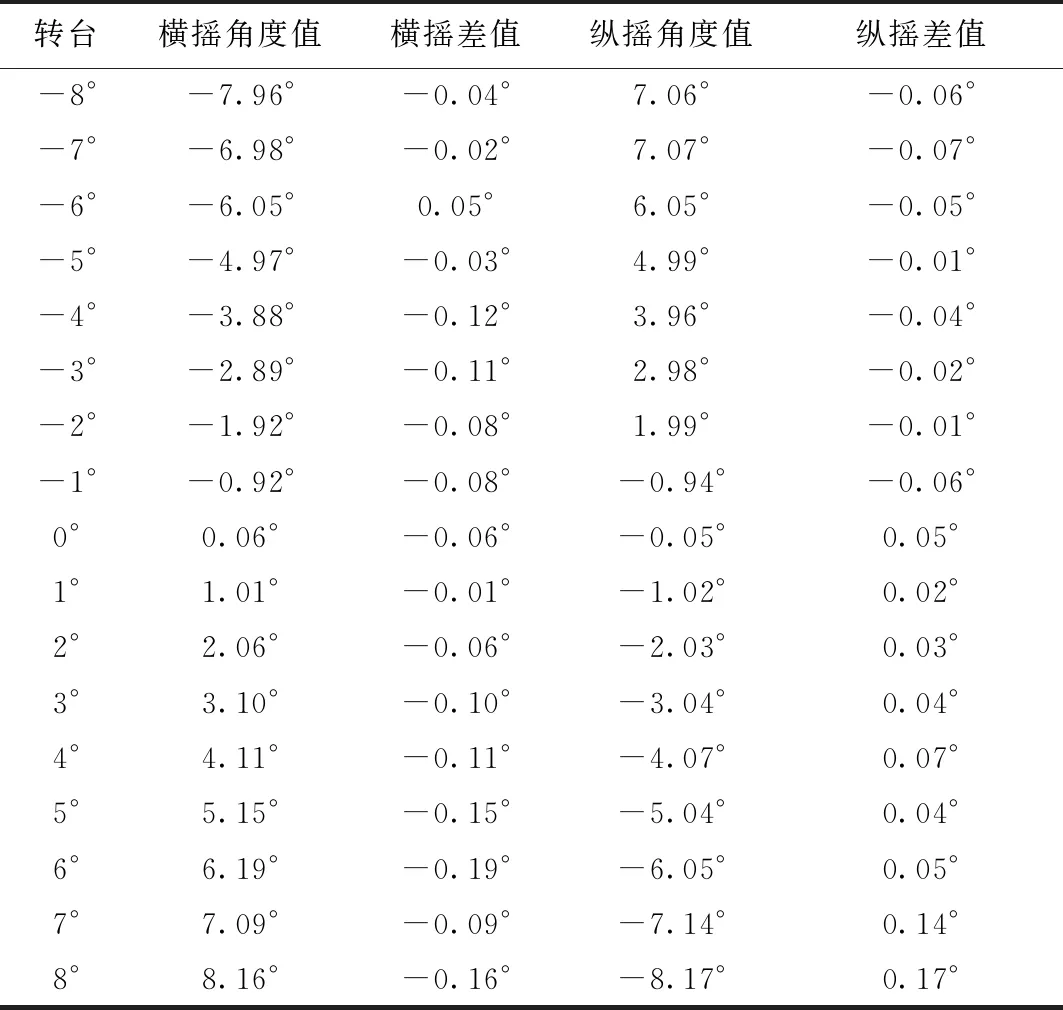
表1 横摇、纵摇角度偏差表
从表1可以看出,横摇传感器与转台的偏差值为:-0.19°~-0.05°,纵摇偏差范围在-0.07°~+0.17°,横摇、纵摇精度在±0.2°范围内,满足控制精度要求。
3.2 补偿测试
补偿测试主要是通过调节姿态传感器位置,计算出横向油缸、俯仰油缸以及栈桥伸缩油缸的伸缩量。根据登乘装置实际动作情况,测量油缸伸缩量,姿态传感器分别在±8°范围内进行动作,测得横向油缸的伸缩量误差小于15mm,俯仰油缸的伸缩量误差小于20mm,伸缩油缸的伸缩量误差小于20mm,控制系统响应及时,动作精度良好。
通过理论计算和模拟实验证明,波浪补偿策略可以很好地解决运维交通船在登乘过程中的横摇与纵摇问题,使得运维人员可以在平稳的栈桥上进行登乘风机,保证人员安全。同时,该方案可以在一定程度上增加可出海作业时间,相比没有安装波浪补偿装置的船舶,可以适应更恶劣的海况,增加风场的运维作业窗口期,保证风电场经济效益。
4 结束语
国家目前在大力推动新能源和可再生能源高质量发展,海上风电产业是我国能源转型和绿色发展的重要方向,也是实现碳中和目标的重要支撑,在“十四五”期间将再次迎来蓬勃发展。海上风电运维作为海上风电场全寿命周期的重要环节,是保证海上风场安全稳定运行的重要工作,而运维环节中安全风险最高的就是船舶登靠过程,海上环境复杂,在船舶性能不够完善的情况下极易发生安全事故[3]。若船舶配置合适的波浪补偿登乘装置,可以很好地解决在登靠过程中的不利因素。目前波浪补偿理论在行业内已经得到了广泛的认可,但受国内制造工艺限制,系统液压设备的稳定性还有待提高。在政府有关部门、项目开发、运维等单位的共同努力下,将来一定能够探索出一套可行、有效的解决方案,实现登乘波浪补偿系统的标准化和产业化。
猜你喜欢
石油和化工设备(2022年3期)2022-07-13
学苑创造·A版(2022年4期)2022-06-18
辽宁师专学报(自然科学版)(2021年1期)2021-07-21
建材发展导向(2021年7期)2021-07-16
科学与财富(2021年35期)2021-05-10
飞天(2020年9期)2020-09-06
当代陕西(2020年24期)2020-02-01
中国新技术新产品(2016年21期)2016-12-08
汽车零部件(2014年5期)2014-11-11
中国航海(2014年1期)2014-05-09