
双重背景感知相关滤波算法*
2021-05-20 07:18:08王科平朱朋飞
传感器与微系统 2021年5期
王科平, 朱朋飞, 杨 艺
(河南理工大学 电气与自动化学院,河南 焦作 454003)
0 引 言
随着计算机技术的飞速发展,目标跟踪技术在视频监控、无人机侦察、导弹制导等诸多领域得到广泛应用。目前,相关滤波算法[1~6]因其速度快、精度高、鲁棒性强的特点逐渐取代了传统的光流法、均值漂移法、卡尔曼滤波以及粒子滤波等跟踪算法。
2010年,Bolme D S等人[1]提出了误差最小平方和滤波器MOSSE(minimum output sum of squared error),首次将相关滤波算法应用到目标跟踪当中;在此基础上,针对目标样本线性不可分的情况,通过将核函数引入到相关滤波中,提出了具有核循环结构(circulant structure kernel,CSK)[2]的跟踪器、核相关滤波器(kernelized correlation filters,KCF)[3]、以及颜色特征(color name,CN)[4]的跟踪器。为了解决相关滤波中因目标尺度变化而导致跟踪失败的问题,Li Y等人[7]提出自适应尺度变化的核相关滤波器(scale adaptive kernel correlation filter,SAMF);Danelljan M等人[8]在MOSSE算法的基础上提出了判别性尺度空间跟踪器(discriminative scale space tracker,DSST)算法。针对相关滤波中出现的边际效应问题,Danelljan M等人[9]提出具有学习能力的空间正则化滤波器(learning spatially regula-rized correlation filters for visual tracking,SRDCF)算法;Li F等人[10]在SRDCF的基础上,加入时间正则化项,提出了时空正则化相关滤波(spatial-temporal regularized correlation filters,STRCF)算法。针对跟踪过程中相似背景的干扰,Galoogahi H K等人[11]提出了基于灰度特征的CFLM(correlation filters with limited boundaries)算法和基于HOG特征的BACF(learning background-aware correlation filters for visual tracking)算法[12];Mueller M等人[13]提出了CACF(context-aware correlation filter tracking)算法,将背景信息加入到相关滤波器的学习中。为解决跟踪过程中的遮挡问题,综合上述研究成果可知,在相似背景干扰的情况,BACF算法[12]和CACF算法[13]取得了良好的跟踪效果。BACF算法通过对背景信息建模,利用一个掩码矩阵,使得较小的相关滤波器能作用于较大的搜索样本,避免了给建立的模型带来过多的背景因素干扰;CACF算法通过提取目标附近的背景信息,并作为负样本加入到跟踪器的学习中去,从而抑制与目标相似的背景信息。
本文依据BACF算法和CACF算法,通过将目标附近的背景信息作为负样本引入到BACF算法中,从而获得更具鲁棒性的跟踪器。通过在公共数据上验证,本文算法表现出了较好的跟踪性能。
1 背景感知相关滤波算法
BACF算法[11]通过扩大目标搜索区域以获得更多的循环样本,但是搜索区域的变大将引入过多的背景信息。为了解决该问题,背景感知相关滤波算法通过一个掩模矩阵 来提取样本中较小区域的信息,来降低背景信息的干扰,其目标函数为
(1)
式中M为大小为N×D的二值矩阵,其中N为大样本x的中间部分长度,x∈D,yi∈D,w∈D,D为x的长度,其中N≪D。
为了提高计算效率,相关滤波通常在频域中进行计算,将式(1)转换到频域并构建等式约束得
(2)
式中F为傅里叶变换矩阵,H为傅里叶变换常数,IN为单位矩阵。
2 双重背景感知相关滤波
(3)
将式(3)利用增广拉格朗日乘子法转化为无约束优化问题得
L(w,t,^)
(4)
利用ADMM(alernating direction method of multipliers)方法[14]对式(4)进行交替求解,将目标转换为多个容易求解的子问题,通过对子问题的交替求解逐渐逼近全局最优解:
子问题1:求解w*

(5)

(6)
^i+1←
(7)
3 多特征自适应融合
在LMCF[15](large margin object tracking with circulant feature maps)算法中,提出APCE指标来对跟踪响应图进行置信度判别,取得了良好的跟踪效果,APCE判别指标如下
(8)
本文依据该指标为HOG特征和CN特征进行可靠性新判别,并为两种特征进行自适应分配权重W
(9)
4 实验结果与分析
本文实验在MATLAB2018a上进行,计算机配置为Intel i7—8700CPU@3.2 GHz,操作系统为Windows7(64 bit)。实验参数设置具体如下:尺度个数S=5,尺度增量因子α=1.01,HOG特征通道数为31,CN特征通道数为11(灰度图像的情况下为2),正则化因子λ1=0.01,β=10,μmax=100,迭代次数L=2。
4.1 定量分析
为验证本文算法的有效性,在OTB100数据集[16]与BACF,STAPLE_CA,Staple,SAMF,DSST,LMCF算法进行对比实验分析。实验采用OTB中的精确度和成功率作为评价标准。
图1为7种算法在OTB数据集上的平均精度图和成功率图,精确度得分和成功率得分分别为0.842和0.634,排名第一。精确度相比于BACF和STAPLE_CA两种算法分别提高了2.6 %和3.2 %;成功率相比于BACF和STAPLE_CA两种算法分别提高了1.9 %和3.6 %。

图1 7种算法在OTB100数据集上的平均精度和成功率
4.2 定性分析
为了更加直观地分析DBACF算法的跟踪性能,图2给出了DBACF,BACF,STAPLE_CA三种算法的部分跟踪结果。
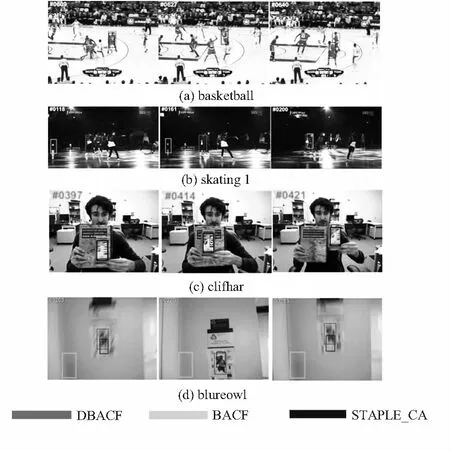
图2 3种算法的部分恩跟踪结果
相似背景:由视频序列“basketball”和“Clifbar”的部分跟踪结果可知,当周围背景与目标相似的情况下,本文算法相比于其它两种算法,表现出了较好的跟踪结果
遮挡:由视频序列“basketball”和“skating1”的部分跟踪结果可知,当目标发生遮挡时,BACF算法跟踪失败,DBACF算法表现出了比STAPLE_CA算法更好的跟踪结果,因此鲁棒性更好。
快速移动:由视频序列“blureowl”的部分跟踪结果可知,当相机进行快速的移动时,其它算法都发生了不同程度的漂移,DBACF算法能够一直成功跟踪目标。
5 结束语
通过与目前主流的相关滤波目标跟踪算法相比,本文算法表现出了较好的鲁棒性,很好地解决了跟踪过程中相似背景干扰的问题,提高了算法跟踪的准确性。但是算法在遮挡、光照变化等情况下的跟踪性能有待提高,下一步将融合不同分辨率的深度特征,进一步提高算法在多种环境下的跟踪性能。
猜你喜欢
太阳能(2022年3期)2022-03-29 05:15:50
太阳能(2020年3期)2020-04-08 03:27:10
农业机械学报(2020年2期)2020-03-09 07:35:30
中华建设(2019年7期)2019-08-27 00:50:18
电子制作(2019年11期)2019-07-04 00:34:38
当代工人·精品C(2019年2期)2019-05-10 00:13:22
电子制作(2018年16期)2018-09-26 03:26:50
计算机应用与软件(2017年7期)2017-08-12 15:45:55
系统工程与电子技术(2016年7期)2016-08-21 13:59:02
项目管理技术(2016年12期)2016-06-15 20:29:33
