基于无人机多光谱影像的冬小麦倒伏提取适宜空间分辨率研究
2021-05-20 03:20黄艳伟朱红雷郭宁戈殷姝溦彭星玥王雨蝶
麦类作物学报 2021年2期
黄艳伟,朱红雷,郭宁戈,殷姝溦,彭星玥,王雨蝶
(河南师范大学,河南新乡 453002)
倒伏是一种常见的小麦生产灾害。小麦倒伏会影响植株的光合作用及养分传输,减少穗粒数和粒重,造成减产[1]。同时,倒伏小麦不利于机械收割,导致农田的收益损失加大。因此,快速准确地获取小麦倒伏面积和程度等信息,有助于农业生产管理部门和农业保险公司进行灾情评估、灾后管理和救助。相较于传统的人工统计法,遥感图像覆盖面大,数据获取及时,是监测小麦倒伏状况的可靠手段[2-3]。目前,基于遥感技术的作物倒伏监测按平台可以分为地面、航空和卫星三类[4]。常用的卫星数据包括可见光-近红外多光谱[5-6]和合成孔径雷达(synthetic aperture radar, SAR)数据[7-8]。然而,由于卫星平台重访周期较长,空间分辨率较低等原因,倒伏区域经常出现数据匮乏、监测结果不准确等现象。近年来,采用无人机遥感监测作物倒伏成为该领域的一个新兴手段。小型无人机遥感具有低成本、低风险、高时效、高分辨率、天气影响小等特点[9-10],非常适于作物倒伏信息的快速提取。李广等[11]对图像进行二次低通滤波,获取地物散点图,并以散点图的明显分界线作为小麦倒伏信息提取的单特征。李宗南等[12]基于无人机图像红、绿、蓝色均值纹理特征提取了倒伏玉米面积。Zhao等[13]同时获取了研究区RGB和三波段多光谱图像,采用深度学习法提取了倒伏水稻的面积,并指出RGB图像的提取结果优于多光谱图像。相较于星载多光谱数据,无人机图像可获取作物的高度信息,增加了倒伏作物提取的准确度,如Wilke等[14]利用无人机反演的作物高度对大麦的倒伏程度进行了划分。但目前基于无人机图像的倒伏作物面积提取研究较少考虑空间分辨率对提取结果的影响[15-18],而空间分辨率直接决定着无人机的成图区域和图像处理的效率。鉴于此,本研究通过分析不同空间分辨率的无人机图像分类结果,以期得出小麦倒伏提取的适宜空间分辨率。
1 材料与方法
1.1 研究区概况
研究区位于河北省邯郸市磁县(东经114°20′06″,北纬36°21′59″),属于温带大陆季风气候,夏季高温多雨,冬季寒冷干燥,年降水量500~600 mm。作物种植制度为一年两熟,种植的农作物主要是冬小麦和夏玉米。冬小麦播种时间一般为每年10月上旬,收获时间为次年6月上旬。该地区在6月8日发生了短时大风和强降雨事件,导致部分小麦发生了较为严重的倒伏。
1.2 数据获取和预处理
本研究所用的无人机平台为Parrot Bluegrass农业多用途四旋翼无人机,搭载的传感器为Sequoia传感器[19]。Sequoia配置了两部嵌入式摄像机:RGB相机和多光谱相机。RGB相机的像素为1 600万,但作者在实践中发现,RGB相机由于是卷帘式快门成像,拍摄的图片存在较为严重的扭曲,无法用于后续的图像拼接、正射图像生成等过程。多光谱相机可以收集红光、绿光、近红外、红边4个波段的信息,4个波段的中心波长依次为660、550、790和735 nm,前三者的带宽为40 nm,红边的带宽为10 nm,像素均为120万。此外,Sequoia还配置了一个日光传感器,用来对多光谱数据进行辐射校正。
无人机数据获取时间为2019年6月9日上午10点,天气晴朗无云、微风。数据采集软件为Pix4D capture,飞行高度设置30、60和90 m三个高度,航向重叠率和旁向重叠率均为80%,飞行前对辐射定标板进行成像。无人机多光谱数据的预处理工作采用的是Pix4Dmapper 软件,经过图像拼接和辐射校正,最终得到研究区不同飞行高度下的多光谱正射影像(图1)和数字表面模型(DSM)。图1中红色为生长期作物和自然植被,绿色为成熟期正常小麦,白色为倒伏小麦,浅蓝色为房屋和土壤。
1.3 分类方法
本研究拟选择监督分类当中的最大似然法[20]、人工神经网络[21]、支持向量机[22]和随机森林法[23],采用总体精度和Kappa系数评价不同分类方法的性能。总体精度是指所有被准确分类的像元数与像元总数的比值,Kappa系数表示分类与完全随机的分类产生错误减少的比例。图像分类和精度评价过程均在ENVI 5.3中实现。
通过在原始图像中选择验证样本来评价分类结果的精度,验证样本的选择直接影响总体精度和Kappa系数的计算结果。本研究采用如下方式计算分类结果的精度:1)在ENVI5.3中选择验证样本,各样本所包含的像元数量不做考虑;2)在原始验证样本中,随机选取采样点,保证各验证样本中像元数量相同;3)将两种验证方式计算得到的总体精度和Kappa系数取平均值。
1.4 倒伏面积提取适宜空间分辨率评价
在明确倒伏小麦提取的最优分类方法基础上,对比不同飞行高度下小麦倒伏面积分类结果。并将90 m飞行高度获取的多光谱数据进行重采样,空间分辨率从20 cm开始,逐次增加20 cm,像元最大增加到200 cm,分析空间分辨率对于倒伏小麦面积提取结果的影响。
2 结果与分析
2.1 分类方法选择
从6种地物波谱曲线(图2)可以看出,研究区存在明显的“异物同谱”现象,成熟期正常小麦和土壤光谱曲线非常相似。倒伏小麦和绿色植被的光谱曲线与其他地物区别明显。房屋和土路光谱曲线相近。因此,在选择样本时,将房屋和土路合并为一类,研究区地物共划分为5类。
以无人机在30 m地面高度获取的多光谱正射影像作为评价不同分类方法精度的试验数据,该图像空间分辨率为3.2 cm。在ENVI5.3中选
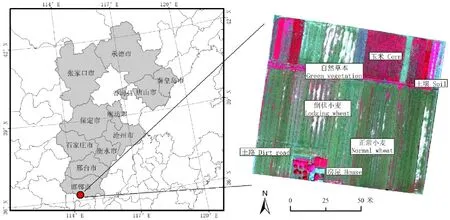
图1 研究区位置和无人机标准假彩色图像Fig.1 Study area location and UAV standard false color image
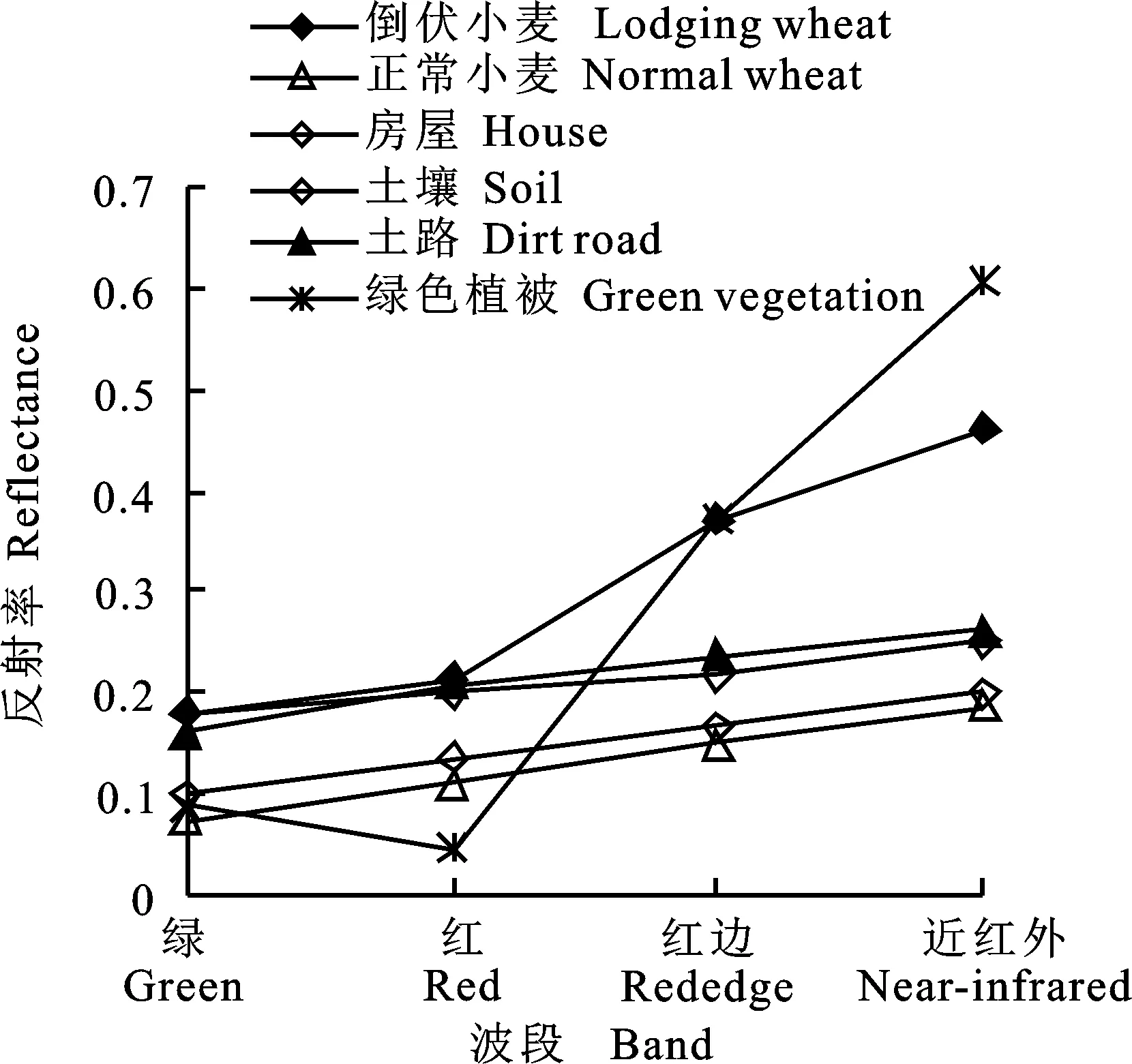
图2 研究区地物反射率光谱曲线Fig.2 Reflectance spectrum curve of ground objects in the study area
择相同的样本区域,采用上述四种方法对该图像进行分类。从图3中可以看出,最大似然法存在严重的错分现象,对倒伏小麦的提取结果最差,玉米地块大部分被错分为倒伏小麦,且正常小麦有部分被错分为土壤。相比而言,人工神经网络、随机森林和支持向量机的分类结果较好,对倒伏小麦的提取结果与实际情况较吻合。但是这三种分类方法都存在将玉米地错分为正常小麦的现象,同时裸露土壤的分类面积也存在差异。
从表3可以看出,随机森林法的分类结果最好,总体分类精度达到了91.08%,Kappa系数为0.88。支持向量机和随机森林法的分类结果相差不大,人工神经网络法其次,最大似然法总体精度和Kappa系数最低,分别为79.67%和0.72。然而从各地物类型的面积比例来看,不同分类方法有较大差异。以土壤为例,支持向量机法的面积比例为8.81%,随机森林法为4.91%,而人工神经网络法仅为2.49%。这是由于该区域小麦已经变黄成熟,非倒伏小麦的近红外特征不明显,其光谱曲线形状与土壤、房屋和土路十分相近,容易被错分和漏分。由于倒伏小麦植株之间相互重叠以及茎秆的反射率较高,其在四个波段的反射率呈逐渐上升的趋势,与其他地物差异明显。无人机图像中春玉米地块植株间的土壤清晰可见,虽然在该区域选择了分类样本,但四种分类方法并没有很好地将春玉米地块中的土壤提取出来。

图3 研究区分类结果Fig.3 Classification results of study area

表1 不同分类方法精度评价Table 1 Accuracy evaluation of different classification methods

图4 研究区数字表面模型Fig.4 Digital surface model of the study area
根据以往的研究,无人机生成的DSM可以作为倒伏小麦分类的特征值。倒伏小麦的高度比非倒伏小麦低,可以利用某个阈值将倒伏小麦提取出来。图4为研究区多光谱图像和DSM叠加显示的结果。从A区域中可以看出,对于单一地块来讲,倒伏小麦的高度明显低于非倒伏小麦。然而从B区域中可发现研究区农田之间的基准高度并不相同。以某一个高度阈值划分倒伏小麦很可能将地势较低农田中非倒伏小麦错分。也有研究采用收获前后获取裸露农田的DSM,进而获取作物的高度信息。本研究并没有采集收获后的影像,因此没有采用DSM阈值法。
为减小工作量和保证分析结果的一致性,进一步在研究区内选择了三个倒伏较为严重的区域作为后续空间分辨率评价的实验区(图5)。在ArcGIS中分别提取四种分类结果中三个地块倒伏小麦的面积,倒伏实际面积采用目视解译的方法获取。从表2可以看出,最大似然法结果与实际倒伏面积相差较大。对于地块1和地块3,支持向量机、随机森林和人工神经网络法之间结果相差不大,而地块2中,人工神经网络法的结果与实际倒伏面积最为接近。因此,在后续的空间分辨率评价当中分类方法选择人工神经网络法。
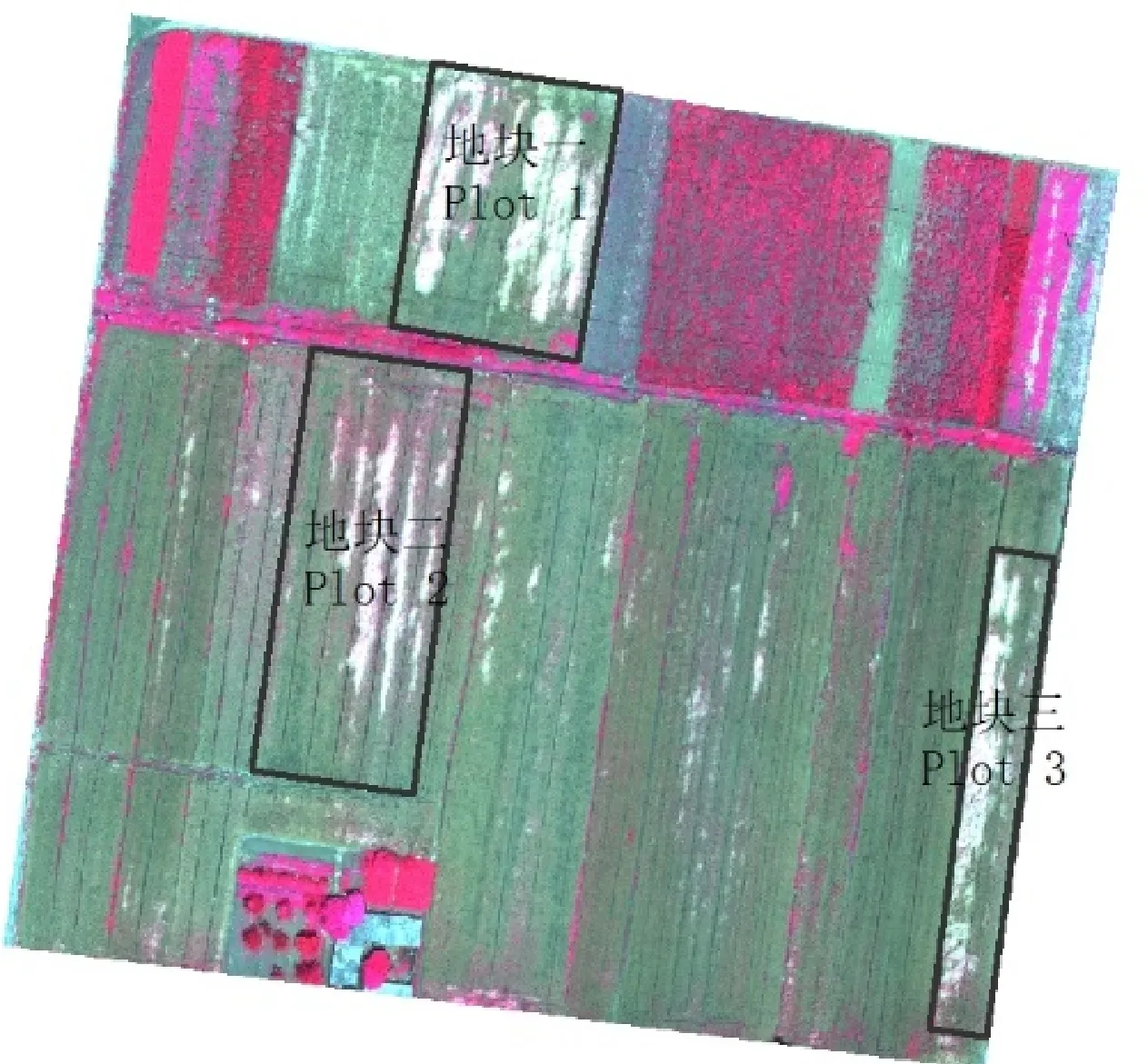
图5 倒伏面积空间分辨率评价实验区Fig.5 Experimental area for spatial resolution evaluation of lodging wheat

表2 试验区倒伏面积分类结果比较Table 2 Comparison of lodging area classification results in test area m2
2.2 空间分辨率对倒伏面积提取结果的影响
在ENVI 5.3中利用人工神经网络对研究区不同空间分辨率的多光谱图像进行分类(图6),为保证分类结果具有较好的一致性,各地类样本均在相同位置进行选择。图7为不同空间分辨率提取的小麦倒伏面积与实际值的相对误差。图7中,空间分辨率3.2 cm、6.6 cm和9.8 cm图像分别为无人机在30 m、60 m和90 m地面高度获取的。从图7可以看出,随着像元尺寸的增大,小麦倒伏分类面积呈缓慢增加的趋势。其中地块1和地块2的相对误差逐渐增加,而地块3的相对误差随着像元尺寸的增大而减小。这是由于地块1和地块2中小麦倒伏程度较严重,地块3中部分区域小麦倒伏程度略轻。在像元尺寸较小时,轻度倒伏的小麦与周围非倒伏小麦之间的光谱信息呈较为连续的变化,轻度倒伏区域容易被错分为正常小麦或其他地物。随着像元尺寸的增大,两者之间的差异越来越大,倒伏像元的提取结果变得更为准确。
进一步分析发现,小麦倒伏分类结果与实际倒伏区域的空间一致性的降低并不是分类误差导致的,而是指随着像元尺寸的增大,其位置精度逐渐降低,倒伏小麦区域的边界锯齿化现象越来越明显,甚至出现一定程度的位移。虽然在图像上提取的小麦倒伏面积与实际面积相差较小,但在空间上两者一致性不好,说明提取结果可能并不适用。例如,在农业保险方面,其实际意义在于准确的小麦倒伏边界可以帮助保险公司明确理赔对象,减少客户与保险公司之间的争议。将不同空间分辨率分类结果转化为矢量格式,在ArcGIS中利用相交工具获取分类结果和实际倒伏区域的重叠面积。以3.2 cm分类结果为基准,计算其他

图6 不同空间分辨率无人机多光谱图像分类结果Fig.6 Classification results of multi spectral images of UAV with different spatial resolution

图7 不同空间分辨率倒伏小麦面积提取结果Fig.7 Extraction results of lodging wheat area in different spatial resolution
不同空间分辨率倒伏面积与该数据的相对误差(图8)。从图8中可以看出,随着空间分辨率的降低,相对误差也在逐渐增大。其中,地块1和地块2在像元大小增加至60 cm时,相对误差分别为13.1%和10.5%。地块2的相对误差曲线变化速率较大,当像元大小增加至20 cm时相对误差为8.2%,像元大小为40 cm时相对误差增加至22%。
结合图7和图8的结果,综合考虑面积总量和空间范围的一致性,本研究认为20~40 cm是提取倒伏小麦较为适宜的空间分辨率范围。20~40 cm意味着无人机可以在更高的地面高度上成像,其飞行区域会更广,而成像时间则会大大减少。以本研究所使用的无人机为例,当地面高度为30 m,空间分辨率为3.2 cm时,任务范围为500 m×500 m,飞行所需时间为84 min。当空间分辨率为14 cm时,对应地面高度为150 m(Parrot Bluegrass在Pix4D capture中的最大飞行高度),飞行所需时间仅为13 min,效率明显提高。

图8 不同空间分辨率小麦倒伏分类 结果空间一致性相对误差Fig.8 Relative error of overlapping degree of wheat lodging area in different spatial resolution
3 讨 论
针对某一项研究如何选择合适的尺度或分辨率,被认为遥感应用研究中的主要挑战之一。空间分辨率的大小对影像分类精度有明显影响,精细的空间分辨率可减少混合像元的比例,提高分类精度,但过高的空间分辨率可能会导致类别内部光谱异质性增大,从而降低分类精度。
地统计学(局部方差和半方差)和分形理论方法认为,随着空间分辨率逐渐降低,某地物类别的方差或分形维数会出现一个拐点,该拐点即为此类地物的最佳空间分辨率,最佳空间分辨率通常与地物大小相近。例如,冯桂香等[24]研究表明,建筑用地的拐点是 3 m,耕地的拐点是 4 m,林地的拐点是 3 m;徐凯健等[25]指出研究森林树种识别的最佳影像分辨率为 4 m,与树冠大小相近。本研究中,重叠的茎秆和叶片使得倒伏小麦在厘米级的遥感图像光谱特征较为均一,其拐点对应的空间分辨率可能更为精细,而在该尺度上提取倒伏小麦数据处理成本较高,对其他地物的分类精度可能呈现相反的结果。也有研究通过加入图像纹理特征来提高分类精度。纹理特征对不同空间分辨率、不同地物分类精度的影响不同。当像元尺寸较小时,纹理特征对分类结果的提升并不显著[26]。
本研究中,倒伏小麦和其他地物光谱特征存在显著差异,不同空间分辨率的光谱特征分类结果表明,40 cm是农田尺度上提取倒伏小麦的上限空间分辨率,像元尺寸继续增大时,其定位精度逐渐降低,导致其分类结果空间一致性变差。此外,高度差异是倒伏小麦另一显著特征。高差数据可通过小麦倒伏前后的DSM提取,也可在地表无作物覆盖时获取DSM,结合作物倒伏后的DSM消除地形影响,再用阈值法提取,该方法需要无人机至少两次的观测数据。本研究中仅获取了小麦倒伏后的DSM数据,无法提取高差信息,将光谱特征和高差信息组合可能会提高适宜空间分辨率的上限。
4 结 论
以冀南地区倒伏小麦农田为研究对象,采用Parrot Bluegrass获取该地区不同飞行高度的多光谱图像。在四种监督分类方法,最大似然法对地物存在严重的错分现象,人工神经网络、随机森林和支持向量机的总体分类结果较好,其中人工神经网络对倒伏小麦识别结果最准确。无人机图像在空间分辨率提高的同时,信息量急剧增加,其分类难度也在提高。依据面积总量和空间一致性,本研究认为20~40 cm是提取倒伏小麦较为适宜的空间分辨率范围。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
北京航空航天大学学报(2022年8期)2022-08-31
网络安全与数据管理(2022年1期)2022-08-29
黑龙江大学自然科学学报(2022年1期)2022-03-29
一重技术(2021年5期)2022-01-18
华人时刊(2016年16期)2016-04-05
CHIP新电脑(2016年3期)2016-03-10
食品工业科技(2014年23期)2014-03-11
微型计算机(2009年4期)2009-12-23
数码摄影(2009年12期)2009-12-07