
一种网箱养殖区自动提取方法
2021-05-18 11:27刘浩刘晓宏刘新闻
遥感信息 2021年2期
刘浩,刘晓宏,刘新闻
(1.重庆市勘测院,重庆 401121;2.德阳市不动产登记中心,四川 德阳 618099;3.四川省煤田地质局一四一队,四川 德阳 618099)
0 引言
我国水产养殖业的快速发展推动了渔业经济的增长,但同时也造成水体富营养化及水体溶氧压力增大等水质问题,对水环境的承载能力形成了较大压力[1]。因此,对水产养殖进行动态监测和分析,进而实现科学规划和合理布局在近年来不断引起重视。本文以丹江口水库为研究区,该地区水产养殖以鱼虾的网箱养殖为主,网箱养殖在很大程度上推动了周边经济增长,但同时也对库区水质环境造成一定影响,通过高分辨率遥感影像对网箱养殖区开展空间监测,进而实现综合分析与定量评价,对库区资源开发和生态保护具有重要意义。
针对水产养殖区的遥感自动提取主要包括基于特征指数、基于纹理信息、基于空间结构、面向对象和基于深度学习等方法。其中,基于特征指数的提取[2-3]是指针对影像的多光谱信息,通过比值、差值、求倒等光谱间波段运算抑制背景地物信息,同时增强目标地物与背景信息间的差异,从而突出网箱养殖区的信息特征。基于纹理信息的提取方法[4-6]通过统计分析、波谱分析等纹理分析方法将网箱养殖区在图像中反复出现的规则特征进行凸显。基于空间结构的提取方法[7-9]通过邻域分析、梯度分析等空间分析,突出目标地物的规律性空间特征。面向对象的提取方法[10-12]利用不同尺度分割方法实现影像分割,然后针对网箱养殖区的特点,利用光谱、纹理和空间信息来提取目标斑块。基于深度学习的提取方法[13-14]通过样本与计算机迭代对提取模型参数进行训练,自动学习网箱养殖区的特征,从而实现自动提取。
由于网箱养殖区多分布于近岸区域,在影像中表现出内部水体、自然水体以及陆地边缘水体之间既有相似性又有差异性,区分难度较大。此外,水库中的小岛及水体随机斑点将会给网箱养殖区提取带来较大的干扰。上述方法均有各自的优势,同时存在一定的不足。本文提出一种基于改进层次分析法的自动提取方法,综合运用基于像元和面向对象方法的优势,通过优化归一化差分水体指数、改进纹理特征分析法和简化的区域分割算法,实现对网箱养殖区的自动提取。
1 研究区概况及数据源
丹江口水库位于湖北省丹江口市和河南省淅川县,其水产养殖以鱼虾的网箱养殖为主,通常在水库近水岸成片布设(图1)。网箱主要由钢管焊接而成,利用油桶制作浮子使其漂浮在水面。网箱养殖区从形态上看主要呈格网状,格网内部是水体。网箱养殖区呈现一定的规律性,但网眼大小不统一,与实际养殖的水产品相关。

图1 网箱养殖区现场照片

图2 研究区假彩色影像图
2 研究方法
基于改进层次分析法的网箱养殖区提取技术流程如图3所示。主要分为3个层次:第1步通过优化归一化差分水体指数(optimized normalized difference water index,ONDWI)将水体与陆地分离,其中水体包含了自然水体、网箱养殖区、小岛及其他干扰对象;第2步利用基于比值指数的纹理特征分析法,将网箱养殖区与自然水体分离,其中网箱养殖区包含了小岛及其他干扰对象;第3步基于简化的区域分割算法(面向对象法),利用网箱养殖区规则的形状特征将其与小岛及随机噪点等干扰对象分离,最终实现网箱养殖区的精准提取。
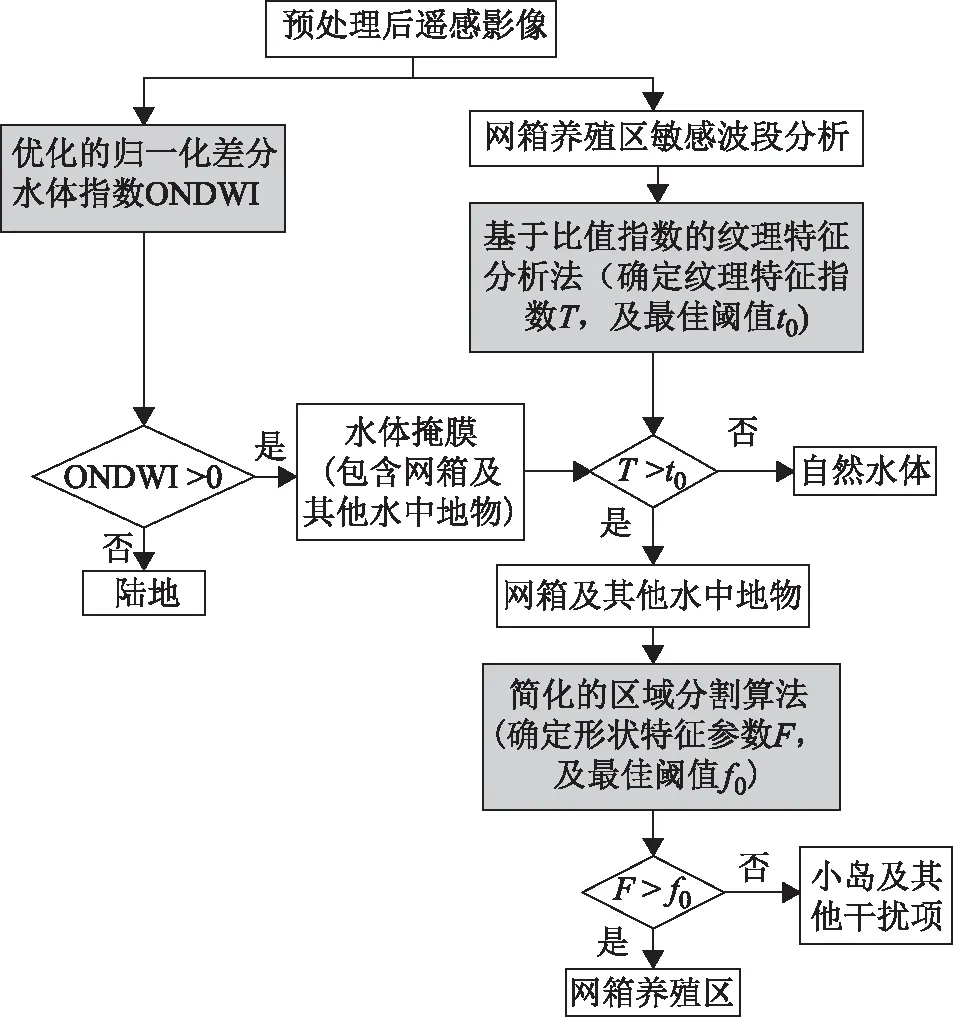
图3 技术流程图
2.1 优化的归一化差分水体指数(ONDWI)
水体对太阳光的的反射较弱,吸收能力通常要强于其他地物,Mcfeeters[15]在1996年首次提出归一化差分水体指数(normalized difference water index,NDWI)(式(1)),并在以后的水体提取研究中得到广泛应用。
(1)
式中:bgreen为绿波段;bnir为近红外波段。
由于人工地物光谱曲线与水体较为接近,如果仅使用简单的NDWI运算,部分人工地物将被错误地划分到水体中,造成网箱养殖区的虚检率增高。因此,提出一种优化的归一化差分水体指数(ONDWI),主要用于排除部分人工地物的干扰。其运算步骤如图4所示。
首先,对假彩色影像(图4(a))进行NDWI计算,得到NDWI计算结果(图4(b)),经阈值分割后得到初始水体提取结果(图4(c));然后,利用人工地物与水体的光谱差异,选取敏感波段近红外波段(图4(d)),在敏感波段上提取与初始水体结果(图4(c))相同位置的光谱值,得到图4(e),通过对图4(e)进行阈值分割,得到人工地物提取结果(图4(f));最后,将初始水体提取结果(图4(c))与人工地物提取结果(图4(f))进行差运算,从而得到精确的水体信息提取结果(图4(g))。
2.2 基于比值指数的纹理特征分析法
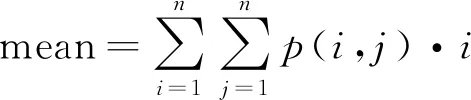
网箱养殖区在纹理上与其他地物有较大区别,具有较为规则的形态特征,从纹理特征出发提取网箱养殖区可取得较好效果。灰度共生矩阵是用来描述纹理的常用手段,是一种有效的纹理信息统计方法。常用的统计量包括均值(mean)、方差(variance)、对比度(contrast)、熵(entropy)、相关性(correlation)等。本研究通过样本分析发现,纹理均值对网箱养殖区的特征提取具有较好的效果,其计算如式(2)所示。
(2)
此外,影像中网箱养殖区光谱特征与水体接近,若使用基于单一波段的光谱信息区分网箱养殖区和水体效果不佳。因此,提出利用比值特征指数来增强网箱养殖区与水体在光谱上的差异性,从而达到突出网箱养殖区信息的目的。分别选取绿波段与红波段、绿波段与近红外波段、红波段与近红外波段构建网箱比值指数(式(3)、式(4)、式(5))。
(3)
(4)
(5)
式中:C1、C2、C3为构建的比值特征指数;b2、b3、b4分别为绿波段、红波段及近红外波段的反射率。
为自己的漂亮所惑的女人很难有幸福之人。所谓知足常乐,而这类女人是不可能知足的。在她们看来,丈夫总是配不上她们,衣服总是配不上她们,工作环境总是配不上她们,居住环境当然也总是配不上她们,身旁的众人更是配不上她们。所以,她们眉藏煞气,心浮气躁,自私自利,惹人生厌。
为提高计算效率,将纹理特征运算从影像各波段分别计算转换为在比值指数基础上计算。即在网箱养殖区比值指数基础上,以ONDWI提取结果为约束条件,进行纹理均值的计算,对纹理均值运算结果图进行阈值分割,实现对自然水体的剔除,得到网箱养殖区初提取结果。
2.3 简化的区域分割算法
为简化计算量提升计算效率,使用简化的区域分割算法代替原始影像图斑分割,即直接在ONDWI提取结果的二值图像上,通过8邻域种子生长法建立图斑对象,并为对象贴上标签。
在网箱养殖区初提取结果中,包括网箱养殖区、水中小岛及水体斑块,利用面向对象技术进行干扰对象剔除。从光谱特征上区分网箱养殖区、小岛及水体斑块具有一定难度,在区域生长形成的板块对象基础上,网箱养殖区往往呈较规则的方形或矩形且具有重复性,而小岛则主要呈圆形或椭圆形状,水体斑块则呈随机无规律形态。基于此,以形状特征指数加以区分可取得较好效果。选取具有代表性的形状特征指数长宽比(length-width ratio,LW)和面积周长比(area-perimeter ratio,PAI)[16]来加以区分,基于样本训练确定LW和PAI的最佳阈值,利用阈值分割剔除小岛及随机斑块的干扰。LW和PAI的计算如式(6)、式(7)所示。
LW=Plength/Pwidth
(6)
PAI=Pperimeter/Parea
(7)
式中:Plength、Pwidth分别为分割对象具有相同标准二阶中心矩的椭圆的长轴长度和短轴长度;LW形状特征计算如图5所示;Pperimeter、Parea分别为分割对象边缘像元个数之和、所有像元个数之和,当分割对象大小不变时,PAI越大,区域越复杂。

图5 LW形状特征指数计算示意图
3 结果与分析
3.1 提取结果
影像经ONDWI运算后,水体信息在影像上得到了增强,而陆地、植被等其他地物信息得到抑制,利用波谱曲线上的差异性,可有效提取水体信息。与传统NDWI算法相比,优化的ONDWI算法能够更加准确地剔除水体边缘人工地物的干扰,完整地提取出水体信息(包含网箱养殖区)(图10(b)),为后期网箱养殖区准确提取排除了人工地物的干扰。
进一步在水体信息中,利用比值指数增强网箱养殖区信息。图6为在ONDWI提取水体信息基础上,经3种比值指数运算后网箱养殖区信息对比图,其中白色为水体、灰色为网箱养殖区及部分干扰地物,黑色为其他地类。由图6可知,经比值指数C1运算后可在突出网箱养殖区信息的同时尽量减小信息损失,进而在C1比值指数运算基础上,进行纹理均值的计算,开展阈值分割。
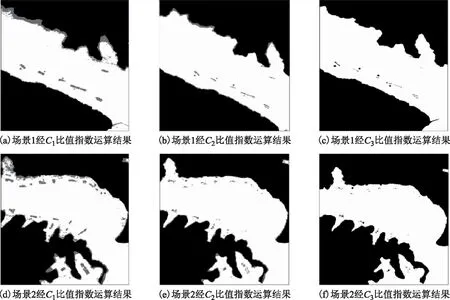
图6 3种比值指数运算结果对比图
图7为各对象纹理均值概率密度分布图。由图7可知,图像分别在1.4和1.488时存在波谷。经实验证明,当取阈值t0=1.488时,水体边缘残留的自然水体能够被有效剔除,从而获得网箱养殖区初提取结果,如图10(c)所示,其中具有一定规则性的是网箱养殖区。
在初提取结果中包含了水中小岛和未剔除的水体噪声等干扰项,利用简化的区域分割算法,形成图斑对象,以长宽比LW和面积周长比PAI 2个形状特征指数加以区分。图8展示了典型网箱养殖区和典型干扰对象的图像特征和形状特征指数,网箱养殖区形状较为规则,大体呈矩形,而一般干扰地物成自然不规则形态。从形状特征指数计算结果来看,网箱养殖区长宽比LW和面积周长比PAI通常大于干扰地物。

图7 纹理均值概率密度分布图

图8 典型对象形状特征及形状指数
典型的网箱养殖区呈细长型,因此,长宽比LW较干扰对象大。网箱养殖区形状较为规则,内部复杂度比干扰对象简单,因此面积周长比PAI比干扰地物小。图9为典型对象形状特征指数的3点分布图。经实验证明,当LW和PAI取最佳阈值1.86和0.048时,可较为明显地将网箱养殖区和干扰地物进行区分。以最佳阈值进行分割,可将小岛和水体噪声等干扰对象剔除,实现网箱养殖区的准确提取。图10(d)为网箱养殖区最终提取结果。
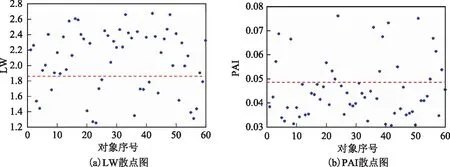
图9 待提取对象形状特征指数散点图

图10 网箱养殖区分层次提取结果
3.2 精度分析
为验证方法的提取精度,分别采用最小距离法和最大似然法对实验区网箱养殖区进行提取,将3种方法提取的结果进行对比。实验过程中,基于最大似然法和最小距离法提取网箱养殖区同样会产生部分干扰对象,对比实验采取剔除干扰对象后的结果进行,实验结果如图11所示。为便于分析,选取局部区域(图11(a)中黄色框区域)影像进行细节展示,其结果如图12所示。从细节图可知,最小距离法和最大似然法提取结果均有不同程度的缺失,而本文方法能够较为完整地提取出全部网箱养殖区,且对网箱养殖区边缘的提取更加准确,对网箱养殖区的规则形状保留最完整。
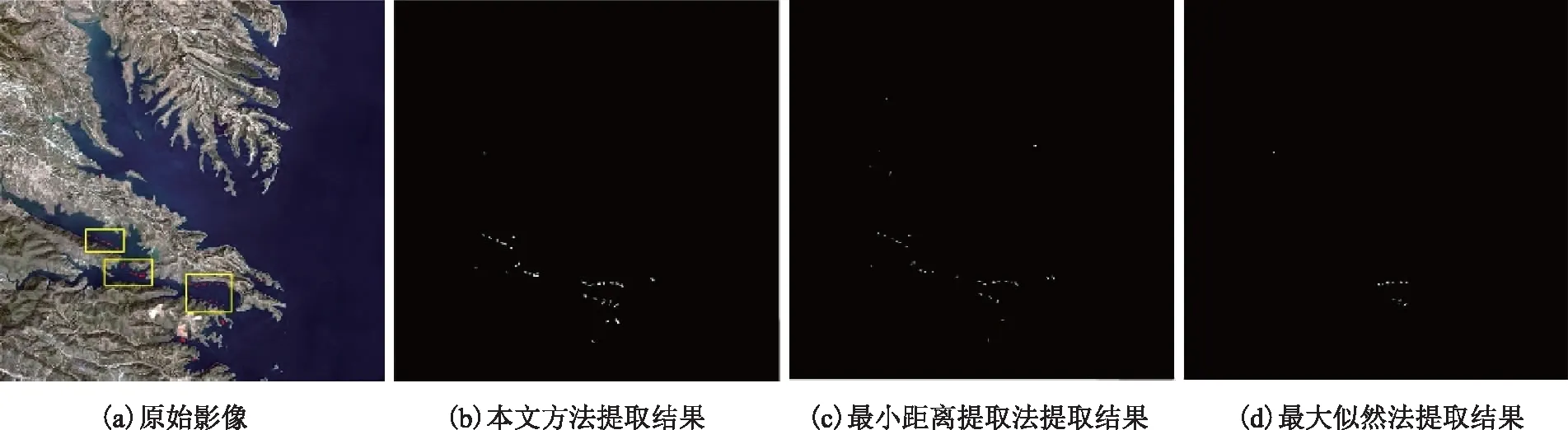
图11 不同算法的网箱养殖区提取结果

图12 不同算法的网箱养殖区提取对比图(局部)
针对网箱养殖区提取精度的评定,采用目视解译结果与3种自动提取方法的提取结果进行对比,按提取出的网箱养殖区对象个数进行比较(表1)。由表1可知,本文方法提取精度为88.1%,与最小距离法和最大似然法相比有较大提升,比最小距离法的提取精度高14.3%,比最大似然法的提取精度高45.2%。

表1 不同算法提取精度统计
4 结束语
针对遥感影像中网箱养殖区的自动提取,本文基于层次分析法的思想,提出一种网箱养殖区提取方法。该方法通过优化归一化差分水体指数并充分利用网箱养殖区的纹理特征和形状特征,实现对网箱养殖区的准确提取。实验结果表明,该方法相比传统方法具有更高的提取精度,能够较为完整地提取出全部网箱养殖区,且对网箱养殖区的特有形态保留较好。不足之处在于,该方法还存在一定的人机交互处理环节,如纹理特征指数、形状特征指数的选取等,在面向不同区域、不同形态的水产养殖区自动提取时,需要进行针对性的调整。后期将在拓展方法自适应性和应用等方面开展进一步研究。
猜你喜欢
广西科学(2022年5期)2022-12-07
海洋通报(2021年2期)2021-07-22
电子制作(2017年24期)2017-02-02
渔业致富指南(2016年12期)2016-11-11
高师理科学刊(2016年8期)2016-06-15
湖南农业(2016年3期)2016-06-05
西藏科技(2015年4期)2015-09-26
现代盐化工(2015年3期)2015-01-23
河北北方学院学报(自然科学版)(2014年2期)2014-05-30
海洋与湖沼(2014年6期)2014-03-19
