
大高差困难地区多平台影像建模融合处理方法
2021-05-18 11:27孙保燕张小可姚学杰黄邦伟
遥感信息 2021年2期
孙保燕,张小可,姚学杰,黄邦伟
(桂林电子科技大学 建筑与交通工程学院,广西 桂林 541004)
0 引言
多平台融合是时代发展的趋势。利用各个平台的优势解决大高差困难地区的区域建模往往受制于环境、地形、天气、设备因素的影响。如何高效、高精度地建立大高差困难地区的地理信息模型,一直都是低空倾斜摄影的研究重点。
国内外的多平台融合常见的有旋翼无人机和单反相机、旋翼无人机和固定翼无人机的平台融合,如孙保燕等[1]利用旋翼无人机和相机融合,提出了一种空地结合的方式,用于文物保护的精细化建模;陈苹[2]结合固定翼无人机和旋翼无人机的特点,解决了大区域建模的难题;李亚东等[3]提出利用固定翼无人机搭载高精度RTK获取较为精确的影像姿态数据,构建出大比例尺的带状河道地形地貌。在重叠度和匹配算法上,Ajay等[4]使用一种影像低重叠度,借助Photoscan完成精度匹配;涂继辉等[5]提出了一种自动检测和解决高空影像阴影的算法。在大高差航线规划上,大都为KML模式的地形跟随方式来规划立面的航线,对无人机的性能要求和地图精度都有一定的限制,如邹杨等[6]提出了有机分布正射航线和倾斜航线的方法在大高差铁路工程施工中的应用;冯威[7]利用无人机仿地飞行,解决了高寒高海拔困难地区的勘测问题。
本文利用无人机倾斜摄影的方法,对不同像元尺寸相机拍摄的图像进行融合做了探究。利用固定翼和旋翼无人机有机融合可以突破旋翼无人机飞行时长的限制,解决固定翼无人机无法近距离拍摄的问题。本文对空中三角测量点云融合作了理论分析,研究一种大高差航摄分区的公共接边方法和高效率解决空中三角测量出现的不匹配的情况。利用公共接边区域的控制点进行二次空三可消除曝光点接近基线过短的影像,能够快速匹配倾斜影像。
1 技术流程
本文的技术流程如图1所示。

图1 技术流程图
2 案例分析
该县城境内三面高山环绕,主要的山峰高度超过1 000 m。以县城为中心测区面积约为15 km2,如图2所示,上方的白色区域为大疆旋翼飞行区域,飞行高度为200 m、航向重叠率75%、旁向重叠率60%、搭载相机为DJI FC6310。飞行28个架次获取9 578张照片。下方的黄色区域为固定翼飞行区域,采集照片五镜头固定翼飞控平台为飞宇Panda3,飞行高度为450 m,相机搭载SONY ILCE-5100,飞行3个架次获取16 145张照片,通过匀色匀光处理剔除无效照片为1 146张,照片的有效使用率为95.5%。通过RTK对布设区域布置24个检查点,如图2所示位置为黄色的点。图2中灰色点为旋翼无人机和固定无人机公共接边的控制点。图3所示为旋翼无人机和固定翼无人机飞行高度导致航带存在大高差的情况。

图2 航测区域图
在大疆旋翼无人机和五镜头固定翼无人机连接处对大落差航带公共接边进行了分析,在公共接边区域设置了4个公共点(用红线注明)和5个检查点作为公共接边区域精度核定,验证是否满足公共接边地区的标准。

图3 公共区域接边公共点和检查布置图

表1 公共接边区域控点误差表
考虑到固定翼无人机和旋翼无人机的像元尺寸不一样,为更好地拼接公共接边区域的连接精度,在二者航带落差区域按阶梯式增加了连接影像,如图4所示。

图4 公共接边影像分布图

图5 增加连接影像的布置图

表2 增加航带落差影像的公共接边点误差表
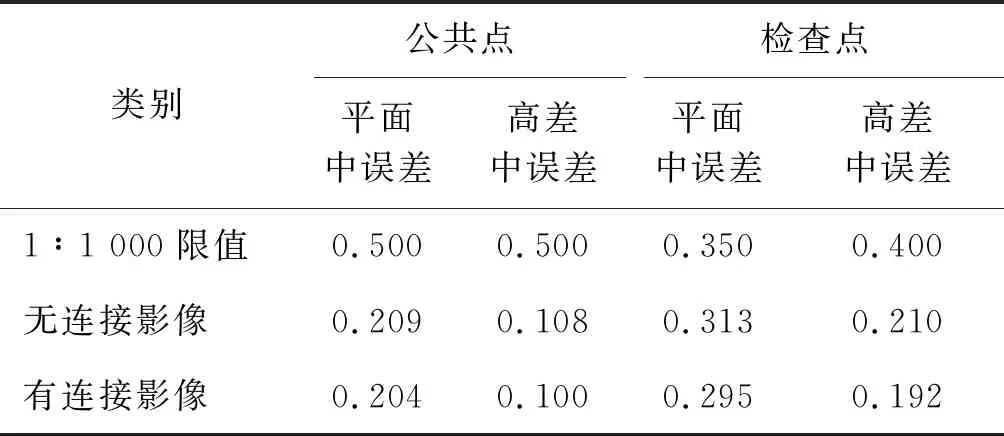
表3 公共接边公共点检查点中误差分析表
通过分析航带公共接边的公共点和检查点的中误差,发现通过添加航带之间的连接影像可以有效地降低检查点的中误差,进一步提高航带分区的特征匹配精度。
3 航带分区连接影像分析
由于固定翼搭载的相机CMOS(complementary metal oxide semiconductor)尺寸为23.5 mm×15.6 mm,远大于大疆旋翼无人机相机CMOS尺寸13.2 mm×8.8 mm,因此,考虑到重叠度的问题,取最小像元尺寸相机的CMOS进行计算。
设CMOS1(a1×b1)的尺寸大于CMOS2(a2×b2)的尺寸,当搭载CMOS1尺寸相机的无人机在上方,搭载CMOS2尺寸相机的无人机在下方时,有
(1)
hL=H2
(2)
式中:hn为第n次CMOS2尺寸相机拍摄的高度;H1为搭载CMOS1尺寸相机的无人机航高;q为连接影像之间的重叠率;H2为搭载CMOS2尺寸相机的无人机航高。
当搭载CMOS1尺寸相机的无人机在下方,搭载CMOS2尺寸相机的无人机在上方时,有
(3)
hL=H1
(4)
式中:f1为为搭载CMOS1尺寸相机的焦距;f2为搭载CMOS2尺寸相机的焦距。
本文使用的是第一种情况,如表4所示。

表4 高低航带连接影像计算表
4 影像匹配
针对影像处理时,本文所使用的方法为尺度不变特征变换算法[8](式(5))。

(5)
式中:m(x,y)和θ(x,y)分别为高斯金字塔影像(x,y)处梯度的大小和方向;L为每个关键点所在的尺度[9-10]。
拍摄的正射影像(包含旋翼和固定翼无人机)由于相机CMOS尺寸不同,在公共连接区域可能会出现曝光点坐标接近情况。因此,借助连接公共区域的4个公共点作为控制点,消除曝光点接近基线过短的影像,处理后的影像作为结构信息先进行一次空中三角测量解算点云,建立局部框架模型。因为在尺度空间金字塔中,主要构建尺度不变特征,将原始影像的主要结构信息作为金字塔顶层,故匹配性较高[11-12]。加入倾斜影像在第二次空中三角测量解算点云时,由于第一次空三框架的存在,在匹配的过程中由主体框架限定搜索区域减小,提高了第二次运算的效率,并且根据第一次空三运算的特征点快速匹配倾斜影像的特征点。

图6 一次空三点云图

图7 二次空三点云图
5 模型重建与纹理映射
将大疆无人机和固定翼无人机的姿态角数据联合形成外方位元素,通过空三解算和影像的自动匹配技术对拍摄区域进行场景重建生成TIN(triangulated iregular network)网格模型[13]。纹理映射主要是通过拍摄多视图片的影像作为纹理图,结合TIN模型的边界轮廓进行重映射生成纹理[14],如图8所示。

图8 TIN模型图
6 精度分析
产出TIN模型后,找出布设检查点的对应点坐标,之后与检查点作误差分析(表5),最后进行中误差分析(表6)。融合精度满足1∶1 000的限差。

表5 误差分析表

表6 中误差分析表
7 结束语
本文通过对大高差重叠航带融合情况进行了讨论,提出不同高差设置连接影像的办法,针对空空结合、空地结合都具有很好的拓展性。
多旋翼与固定翼的结合解决了区域建模的难题。旋翼受制于飞行时长的限制,但可以小区域高精度建模;固定翼虽解决了飞行时长的限制但是针对细部建模往往受到飞控方式的限制。二者的有机结合能够相互弥补。
通过二次空中三角测量解算,第一次空三联合控制点构建重建区域的大框架,第二次利用第一次空三的特征不变的原则高效率重建细部模型,有效解决了目前航测建模会出现的点云错层、影像丢失、拉花、球面的现象。
猜你喜欢
计算机系统应用(2022年4期)2022-05-10
煤气与热力(2021年10期)2021-12-02
北京航空航天大学学报(2021年4期)2021-11-24
天津医科大学学报(2021年4期)2021-08-21
装饰装修天地(2020年11期)2020-07-04
电子制作(2019年7期)2019-04-25
国际呼吸杂志(2019年4期)2019-03-12
铁道勘察(2018年5期)2018-10-22
航空模型(2016年10期)2017-05-09
舰船科学技术(2016年1期)2016-02-27
