
基于Petri网的产品设计功能建模方法研究 *
2021-05-18 05:32张静,常宁,杨杨
机械研究与应用 2021年2期
张 静,常 宁,杨 杨
(1.天津理工大学中环信息学院 机械工程系,天津 300380; 2.卡特彼勒(中国)投资有限公司天津分公司,天津 300308; 3.西科沃克瑞泰克热处理设备制造(天津)有限公司,天津 300385)
0 引 言
产品的功能设计是以多种功能流及其相互关系为特征的一个设计过程,其中包含多种功能之间的相互关系和相互约束。在产品设计过程中,由于机械设计知识非常丰富、复杂,很多是不确定的和非结构化的[1],且对产品设计多方案的评价不够客观,方案之间关系不明确,造成对系统的评价不够准确,当达到一定运行条件时,所设计的产品就会出现不良结果,增加了后期改进设计的强度与增加费用,造成设计中的不必要的浪费。
而Petri网是一种图形化和数学化的建模工具,兼顾形式化和图形化两个方面,拥有强有力的分析技术和仿真工具[2]。利用Petri网进行产品设计过程建模,可以使复杂的设计知识框架结构化、简单化。这是一种适合于描述产品功能建模的方法。因此,提出了一种基于Petri网的产品功能建模方法。
1 基于Petri网的产品功能建模方法
产品的功能建模广泛应用于机械等产品的设计,此方法可以简洁、直观的了解所设计产品的功能结构以及实现原理,具体步骤如下:①确定系统的功能关系,通过明确总功能、各个分功能及其重要性来完成;②列出条件,明确边界条件和初始条件;③寻求实现分功能的作用原理,要在广泛的范围内寻求解,消除偏见;④任意组合作用原理,得到更多的原理解;⑤评价并优化,建立Petri网模型,以目标和给定条件为依据进行评价,并对比优化;⑥决断,得到最优解。
1.1 确定功能关系
19世纪40年代,美国通用电气公司的工程师迈尔斯首先提出功能的概念。他认为,顾客买的不是产品本身,而是产品的功能。系统的功能就是为了满足人们的需求,而系统各部件的功能就是为满足系统目标的实现而服务的。功能(如图1)是输入流与输出流之间的转换,功能流包括物料流(Material)、能量流(Energy)和信息流(Signals)[3]。
功能分解开始于产品总功能的描述,然后将总功能分解为复杂程度比较低的、较为简单的分功能,从而使问题的复杂程度降低,以利于产品功能的结构求解。

图1 总功能关系图
功能分解的方法很多,无论是功能树方法,还是任务列表,都可用于建立功能模型。功能树方法主要有两种方式:一种是自顶向下系统化的功能分析系统技术法(FAST,Function Analysis System Technique)(如图2),一种是自底向上的[4]。

图2 功能树结构
1.2 确定条件
为了确保产品设计的成功率,降低产品成本,需要做到以下几点:①明确客户的需求,从而提炼出具有市场潜力的功能要求;②了解现有的发展技术和生产条件,所设计产品要与生产发展需求相适应;③预算产品的经济效益,要尽可能实现以最小的开发成本,获得符合市场需求的设计方案;④使环境污染达到最小;⑤要利于产品重复利用;⑥设计要考虑安全性、方便性、舒适度和美观等[4]。
1.3 寻求作用原理以实现分功能
通常,单独使用一些物理效应或者将一些物理效应的结合来实现分功能。
1.3.1 寻找原理解的方法
(1) 传统的方法有:收集信息、分析自然系统、分析已知技术系统、类比和测量与模型测验。
(2) 直觉的方法有:头脑风暴法、635法、陈列法、德尔菲法、类比法和联合法。
(3) 逻辑思维法有:物理过程的系统研究、用分类表进行系统的搜索和设计手册的使用。
(4) 组合原理解法有:系统性的组合和依靠数学方法的组合。
1.3.2 分功能的实现
将分功能和解决原理以表格形式(见表1),直接、清楚地显示出各分功能的原理解。

表1 分功能实现原理
1.4 组合原理解
组合原理解的方法有:系统化的组合和借助于数学方法的组合。组合后会得到许多不同程度的实现功能的原理解,这就需要我们选择最佳解作为产品设计的最终原理方案。
1.5 评价的方法
用Petri网来描述产品的功能,建立模型。从而评价所组合的原理解,选出最优原理解。首先了解一下Petri网的基本概念。
1.5.1 Petri网基本概念
此处应用的Petri网是库所容量K=∞的库所/变迁网系统(P/T系统),这属于高级Petri网,由于虽然基本Petri网描述能力很强,但对于描述复杂的条件,它还是有限的,以下给出高级Petri网的基本定义。
定义1 Petri网是一个六元组Σ=(S,T;F,K,W,M),当且仅当:
(1) S∪T≠Φ;
(2) S∩T=Φ;
(3) F⊂(S×T)∪(T×S);
(4) dom(F)∪cod(F)=S∪T;其中dom(F)={s∈S∪T|∃t∈S∪T:(s,t)∈F},cod(F)={s∈S∪T|∃t∈S∪T:(t,s)∈F};
(5) K:S→N+∪{∞}称为N的容量函数(capacity function);
(6) 对给定的容量函数K,M:S→N,称为N的一个标识(marking)的条件是: ∀s∈S:M(s)≤K(s)。
(7) W:F→N+称为N上的权函数,对(x,y)∈F,W(x,y)=W((x,y))称为(x,y)上的权;
其中N+={1,2,3,…},N={0,1,2,…},S和T分别是N的库所(place)集和变迁(transition)集,F是流关系(flow relation)[5]。
该定义说明Petri网是由库所、变迁及它们之间的流关系所构成的一个动态网。通过引入变迁发生规则的定义,可以使得标记(token)在网中流动,Petri网的标识不断更新,从而描述系统的动态过程。
定义2 变迁规则:令Σ=(S,T;F,K,W,M)是一个Petri网,则:
(1) 对于变迁t∈T,变迁t在标识M有发生权(firable)的条件为:∀s∈*t: M(s) ≥W(s, t)∧ ∀s∈t*: M(s)+W(s, t)≤K(s)
t在M有发生权记作M[t>,也说M授权(enabled)t发生。
(2) 若M[t>,则在标识M下,变迁t可以发生(fire),从标识M发生变迁t得到一个新的标识M′(记为M[t>M′),则对∀s∈S,
其中,*t={s| s∈S∪T∧(s, t)∈F},t*={s| s∈S∪T∧(t, s)∈F}分别称为t(t∈T)的前集和后集。
1.5.2 Petri网建模方法
Petri网是描述和分析具有分析、并发、异步等特征系统的一种有效的模型工具。Petri网建模综合利用面向事件,面向活动和面向进程的三种建模方法。它不仅能够自然地描述同步、并发、资源争用的等特征,且本身自含执行控制机制,非常适用于离散事件系统的描述,是一种常见的离散事件系统建模方法[6]。
1.5.3 产品方案的选择过程
方案选择是一个迭代式的五个步骤的过程:
(1) 达成对所有标准的的一致意见。
(2) 达成对所有方案、概念的一致意见。
(3) 对可选方案、概念进行排序。
(4) 对可选方案、概念进行评价。
(5) 对否定意见进行讨论。
2 实 例
弹簧是现代工业中常用的元件,大到飞机军舰,小到手机相机等等各种产品均用到弹簧,因此弹簧的生产已经有几百年的历史了。
绕簧机设计是将一根直径为0.3 mm的钢丝绕成直径为2 mm,螺距为2 mm的弹簧的系统设计。实现钢丝的校直、导料、导向、卷制、定径和定螺距的功能。
2.1 绕簧机的功能建模
绕簧机的主要结构由传动、工作和支架三部分组成[7]。绕簧机传动部分由电机,皮带和齿轮等组成。由皮带和齿轮实现减速传动,从而带动导料滚轮转动。工作部分由校直机构、导料滚轮、导丝管、双顶杆、节距块和断丝刀组成。而这些部件都固定在支架上。工作过程中,钢丝由导料滚轮带动,经过双顶杆和节距块而绕成弹簧。弹簧直径的大小是用双顶杆来调整的,弹簧的螺距大小是由节距块来确定的。
建立总功能和分功能如图3。
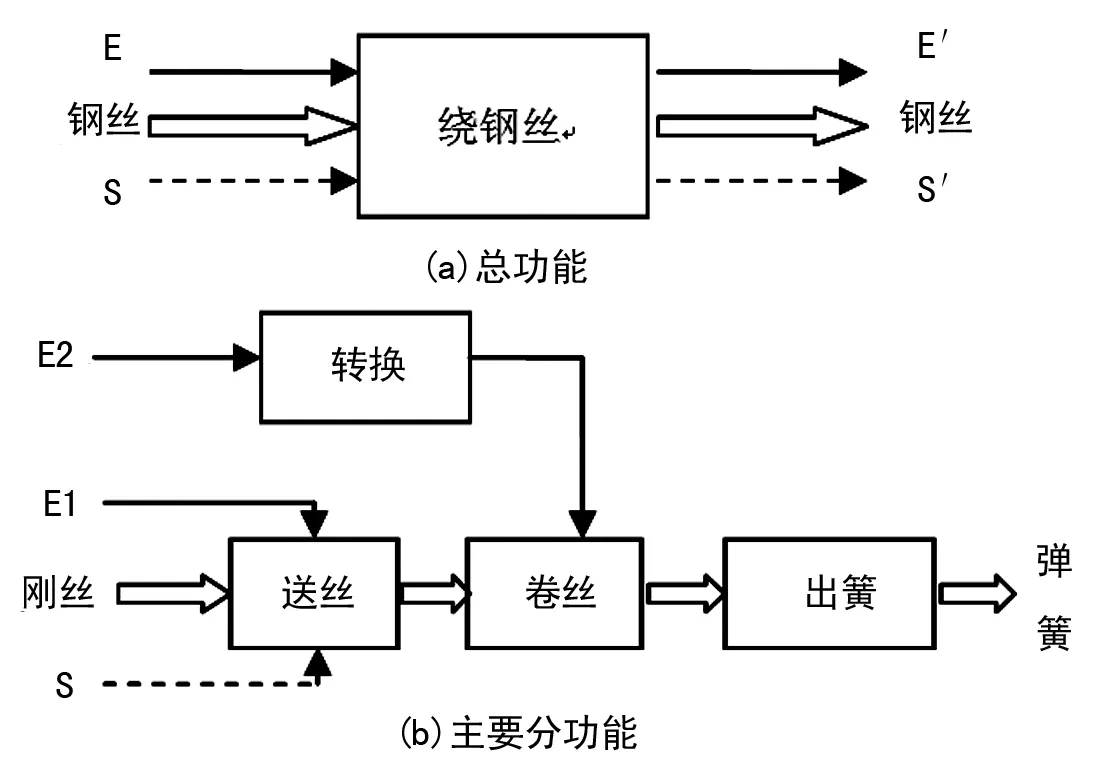
图3 绕簧机的总功能和主要分功能
2.2 寻求作用原理以实现分功能
2.2.1 原理简介
初始物料经拉丝模具处理后,得到直径为0.2 mm的钢丝。所要设计的结构要能实现钢丝的送丝,卷丝和输出弹簧的功能。
(1) 送丝时,要保证钢丝处于直线状态(水平或竖直),松紧程度要适当。
(2) 卷丝时,要尽可能减小直径和螺距的误差。由此看出,卷丝过程是此模具设计的关键。卷丝方式有两种:有芯模具和无芯模具。
对于有芯模具,芯轴可以是圆锥形(如图4)或圆柱形(如图5)。在弹簧卷制过程中,若卷制力越小,卷绕后反向转动的速度越高,转数越多,则回弹量就越大。
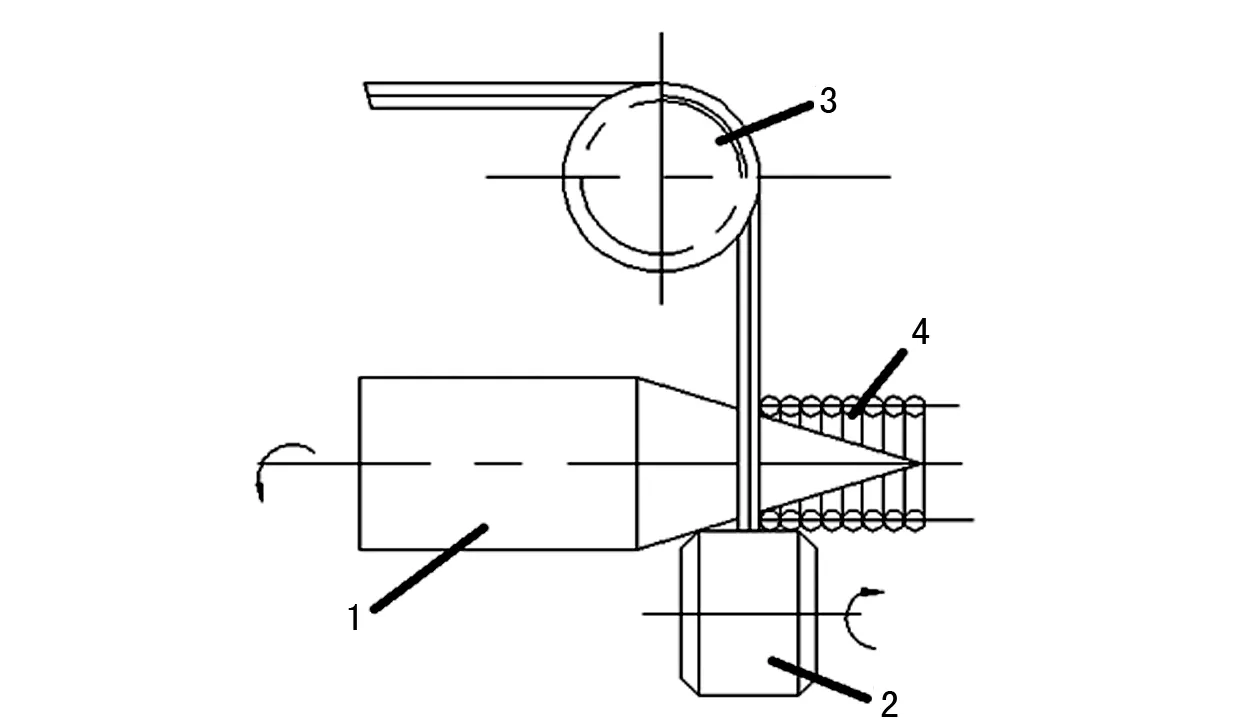
图4 功能树结构1.圆锥形芯轴 2.螺杆 3.导向滚轮 4.导向摆
圆锥形有芯绕簧模具(如图4)与圆柱形有芯模具(如图5)中,由4导向摆或扭杆与芯轴的夹角,来确定弹簧螺距的大小。
在生产实践中,确定回弹量的实质就是确定卷簧芯轴的直径。导向装置与芯轴的距离对回弹量也有影响,二者间的距离大,回弹量也大,且不均匀。实际中,影响回弹量的因素复杂。用芯轴定直径和螺距,容易实现,但是,定螺距需要在芯轴上加槽,考虑到所缠绕的弹簧直径小,因此,误差大,出簧困难。
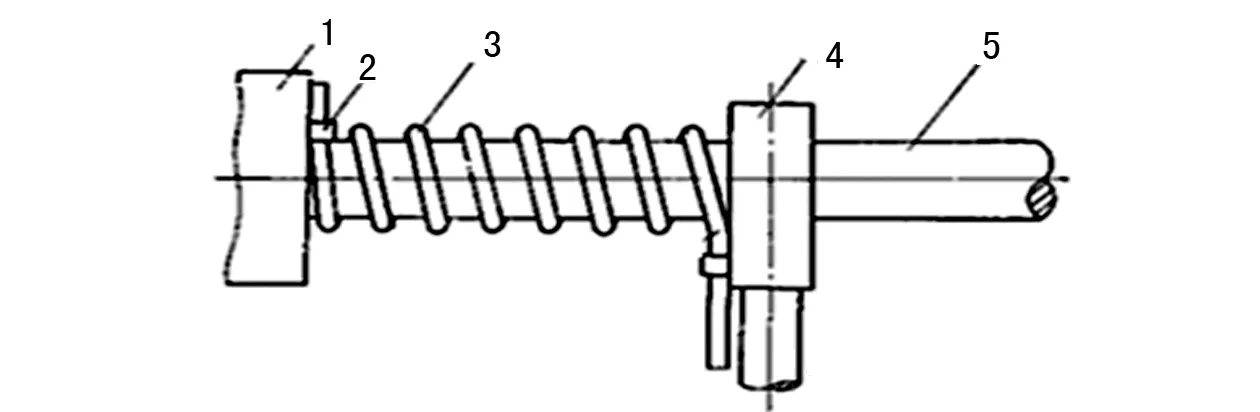
图5 圆柱形有芯模具1.支架 2.导向环 3.钢丝 4.扭杆 5.圆柱形芯轴
对于无芯模具(如图6),误差小,操作简单。但是,对节距块的和顶杆的定位精度要求高。
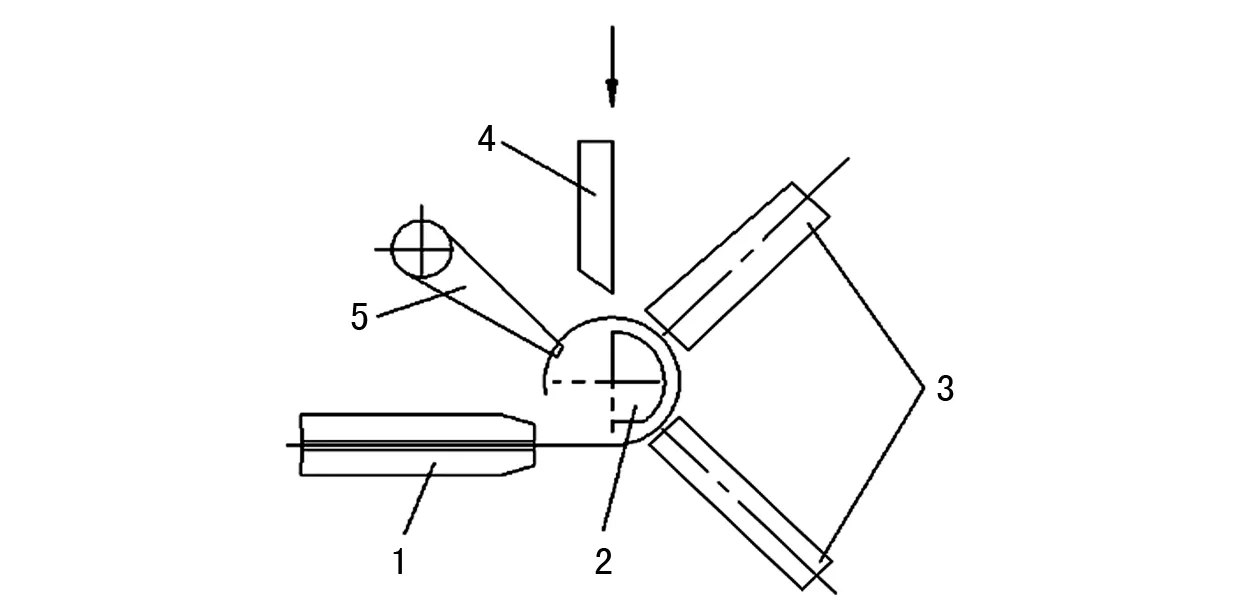
图6 无芯绕簧模具1.孔型导料装置 2.芯轴 3.顶杆 4.切断装置 5.节距块
2.2.2 建立功能结构模型
绕簧机的功能结构模型如图7所示。
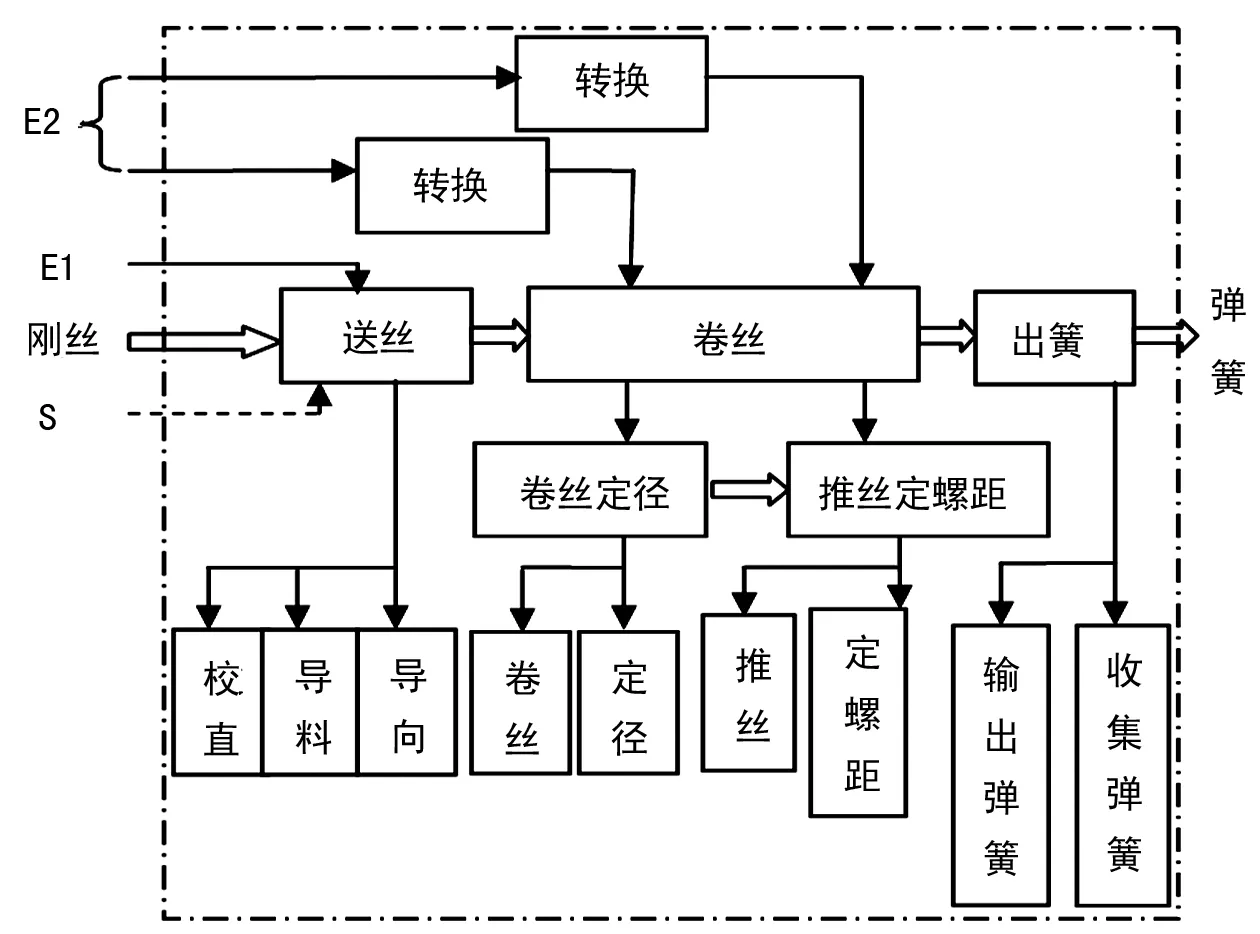
图7 绕簧机的功能结构模型
2.3 作用原理的组合
作用原理的组合如图8所示。
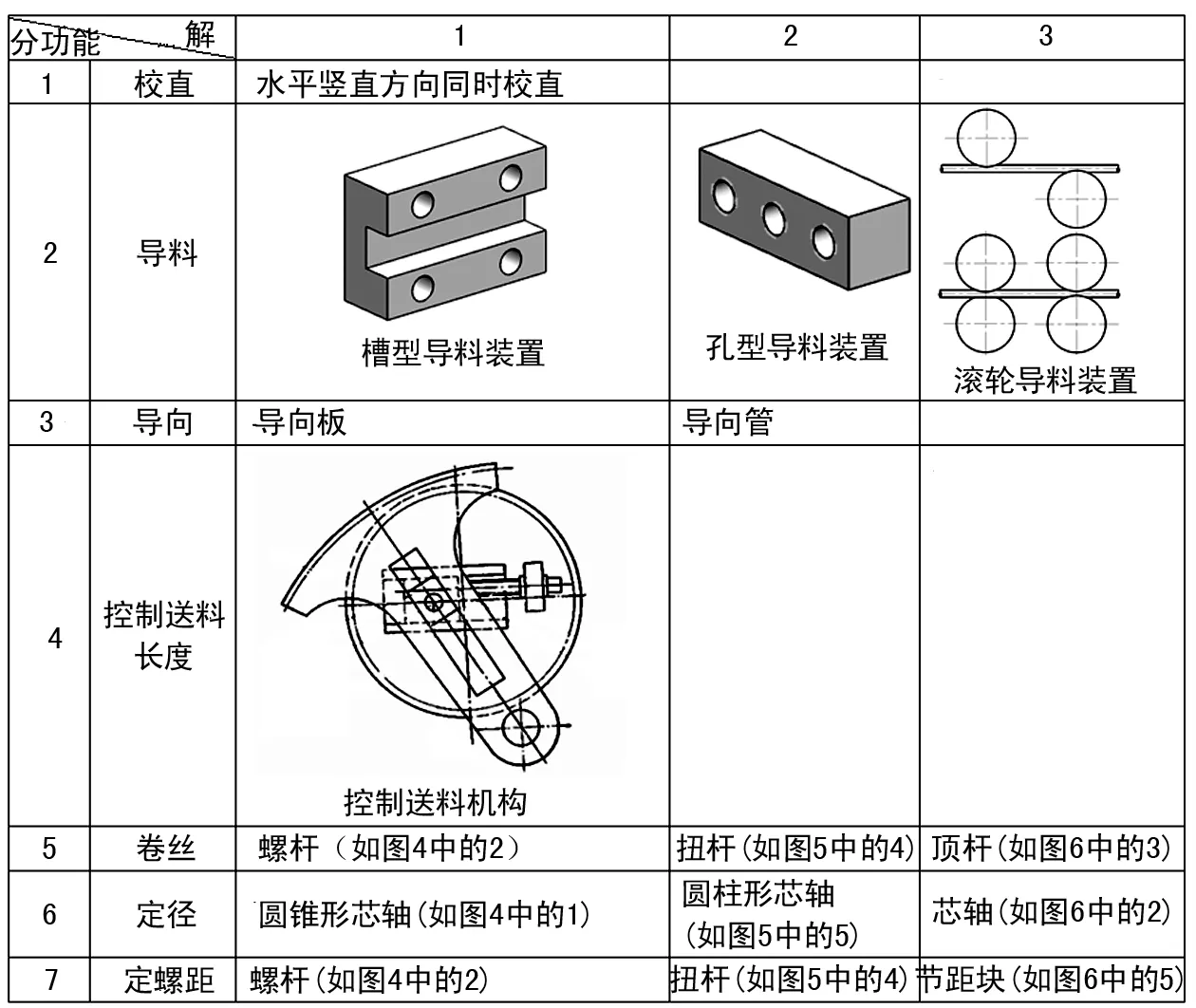
图8 作用原理的组合
2.4 挑选合适的作用原理
根据自动绕簧机的工作原理,校直机构选水平竖直同时校直机构;导料机构选滚轮导料机构;导向机构选导向管;控制送料机构如图8所示;卷丝机构选顶杆;定径机构选芯轴;定螺距机构选节距块,从而得出自动绕簧机原理图,如图9所示。

图9 自动绕簧机原理图1.校直机构 2.滚轮导料机构 3.导向管 4.顶杆 5.芯轴 6.节距块 7.切断装置
2.5 具体化为原理解
芯轴的外径:扭簧内径的确定由芯轴的大小决定,但需考虑扭转后,簧体的变化,因此需要预留适当的余量。
装置空间的内径:若扭转弹簧装置采用崁入式,则需考虑崁入式的空间。空间则决定簧体的外径、自由长、圈数。
动作的起终点:施力扭杆在未做功时,与支点的角度位置,可确定施力扭杆的长短、形式及与支点杆的角度。
2.6 绕簧机工作过程的Petri网描述
2.6.1 绕簧机卷制弹簧的流程
绕簧机工作分三步,即送丝,卷丝和输出弹簧。
送丝机构包括校直,导料和导向三部分;卷丝机构包括卷丝和定径两部分;输出弹簧机构包括。绕簧机卷制弹簧的流程如图10所示。
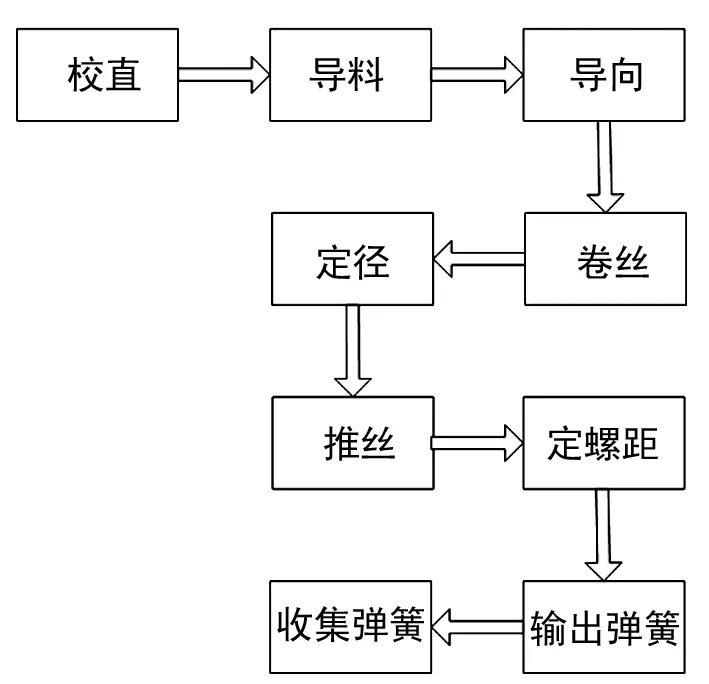
图10 弹簧机卷制弹簧流程图
2.6.2 画出Petri网模型
图10是绕簧机卷制弹簧过程的Petri网模型,每个库所表示所处的工作状态,每个变迁表示工作状态的转换[3]。其中库所元素和变迁元素所代表的意思分别见表2、3所列。

表2 Petri网库所元素说明

表3 Petri网变迁元素说明
由绕簧机卷制弹簧过程的Petri网模型(见图11),分析绕簧机的性能:
(1) 有界性:绕簧机的设计是一个可控的循环控制问题,不影响系统的有界性,所以整体产品系统是有界的。
(2) 活性:从初始标识开始,每一个变迁都被至少激发一次,所以所有的变迁都能通过某变迁序列激发,也就是绕簧机的各个状态的转变依某逻辑顺序是可以实现的,因此,系统是活的。
(3) 可达性:绕簧机设计中Petri网所描述的状态都能达到,所以系统是可达的,即绕簧机方案实现是合理的。
(4) 前进性:模型中,不存在无用的循环,四个节点的循环都是有益的,可控的,所以系统具备前进性。
通过以上特性分析,可知绕簧机系统的原理解方案,具备逻辑上的合理性与可实现性。
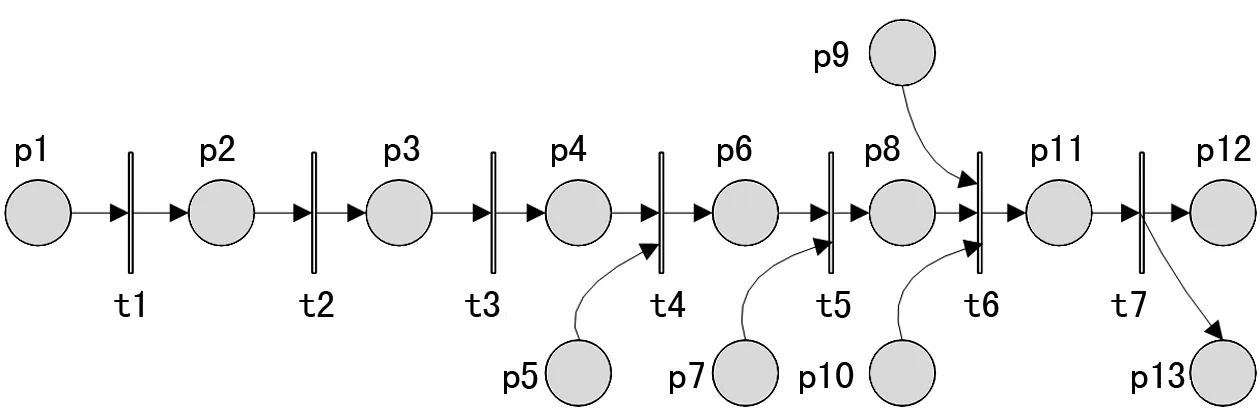
图11 绕簧机卷制弹簧过程的Petri网模型
3 结 语
将Petri网与功能模型结合起来,得到一种适合于产品设计的功能建模方法理论。该理论方法,首先从分析所设计产品的总功能出发,分析实现总功能的各个分功能,从而建立功能结构模型;其次,寻找实现各分功能的原理,即针对每个分功能,可以找出一系列作用原理;第三,在各分功能的实现原理中,任选一种原理进行组合,即可得到多个原理解;最后,用Petri网建模方法,按照设计产品的工作流程,有条理性的描述产品功能模型,选出最优解。
该方法确定后,以绕簧机为例,建立绕簧机的功能结构模型,得到子功能,然后寻找各功能的作用原理,并组合得到产品的一系列原理解,通过Petri网建模方法选出最优解。由此可以看出,基于Petri网的功能建模方法是可行的。
猜你喜欢
机械管理开发(2021年9期)2021-10-15
山东冶金(2020年5期)2020-11-10
理化检验(物理分册)(2020年9期)2020-11-09
上海金属(2020年5期)2020-09-26
中国粮食经济(2018年12期)2018-12-30
中国粮食经济(2018年10期)2018-12-30
中国粮食经济(2018年11期)2018-12-27
人大建设(2017年6期)2017-09-26
河南冶金(2015年4期)2015-12-22
装备制造技术(2015年7期)2015-02-20
