
基于网络的EHA伺服教学实验台设计
2021-05-14 02:09赵孟文樊泽明
液压与气动 2021年5期
王 博, 赵孟文, 樊泽明
(1.西安航空学院机械工程学院,陕西西安 710089;2.西北工业大学自动化学院,陕西西安 710072)
引言
作为功率电传作动系统中最为代表性的电动静液作动器(EHA)[1],兼有传统电传液压作动系统较高的作动稳定性,快速响应等优点,有效地减小了体积与质量,实现了模块化与集成化,改善了传统作动系统油管遍布机身所产生的可靠性与可维护性的问题。基于EHA已成为未来飞机作动系统的主流,航空类院校EHA相关的理论课程也逐步开设,然而,一台EHA伺服教学实验台的造价非常昂贵,如果采用传统实验教学模式,只有一台实验设备是很难保证学生实验质量的。设计实现一套基于互联网的EHA伺服教学实验台[2-4],可以改变以分离模式为主导的传统教学模式,使做实验不再受时空约束,教师上课时可通过网络控制实验台,实验台的图像及控制数据实时传回课堂,为学生理解理论提供帮助,学生还可通过注册排队的方式实现有序实验,学生在做网络实验的过程中不但能学到知识,还能充分调动学生学习积极性[5-9],真正实现了理论与实践一体化同步教学,是一种将理论与实践结合的全新教学模式。
1 EHA伺服教学系统结构及组成
实验装置由带负载模拟的EHA台、操作控制柜、工业控制计算机、服务器、摄像机等主要设备组成。实验台中的控制操作柜由两层柜体组成,上层柜体安装液压仪表、电气仪表、液晶显示器、液压操作阀等,下层柜内安装有工业控制计算机、电源、EHA、接触器、继电器等,下层立面安装按钮、指示灯等,带负载模拟的EHA台安装在上层柜体的台面上。所有需要体现实验内容的实验台部件均清晰的展示给学生,保证通过摄像头视频,学生和教师在远程能够清晰看到整个实验过程。操作柜台面上带负载模拟的EHA台为该网络远程控制实验的控制对象,负载模拟的EHA台具有1个移动运动副,负载模拟由液压泵站电机、伺服阀和模拟翼面液压缸组成,1个做负载,1个做运动控制。操作台布局如图1所示。
实验台由三部分组成,分别是远程测控部分、机电驱动部分、EHA液压系统部分:
(1) 远程测控部分由CVI本地测控软件、Moxa卡、PCI8932数据采集卡组成,Web远程控制界面主要由一台工控机、一台服务器及若干板卡实现,工控机将控制信号通过Moxa卡送出至电机驱动,工控机采用测控软件LABWindows/CVI,该软件通过编写C语言程序依托其强大功能可实现计算机控制系统的搭建。

图1 操作台EHA及负载模拟布局
平台分为本地部分和远程部分,本地部分有自己的测控界面,通过修改C语言代码可实现各种控制算法的加入,本地测控界面完成的C语言代码支持开环、单位反馈以及数字PID实验,可将其运动曲线以及传感器数据显示在界面上,通过TCP/IP协议实现远程控制本地,远程部分通过打开浏览器输入实验台服务器网址,即可进入网络远程界面预约实验,网络实验界面包括实时在线视频和实时传感器数据;
(2) 电机驱动系统由伺服电机、电机驱动器,电机尾部光电编码器组成,电机型号为ecma-ca0604rs,该电机响应速度及精度满足系统要求;
(3) 液压系统部分由微型泵、伺服阀、液压缸及拉压力、位移传感器组成,其中微型泵选用PB33 HP 054560型号,转速5000 r/min,流量为0.225 L/min,持续压力90 MPa,工作温度200 ℃,重量0.33 kg,可正方向转动或者反方向转动,吸油能力强。系统组成如图2所示。
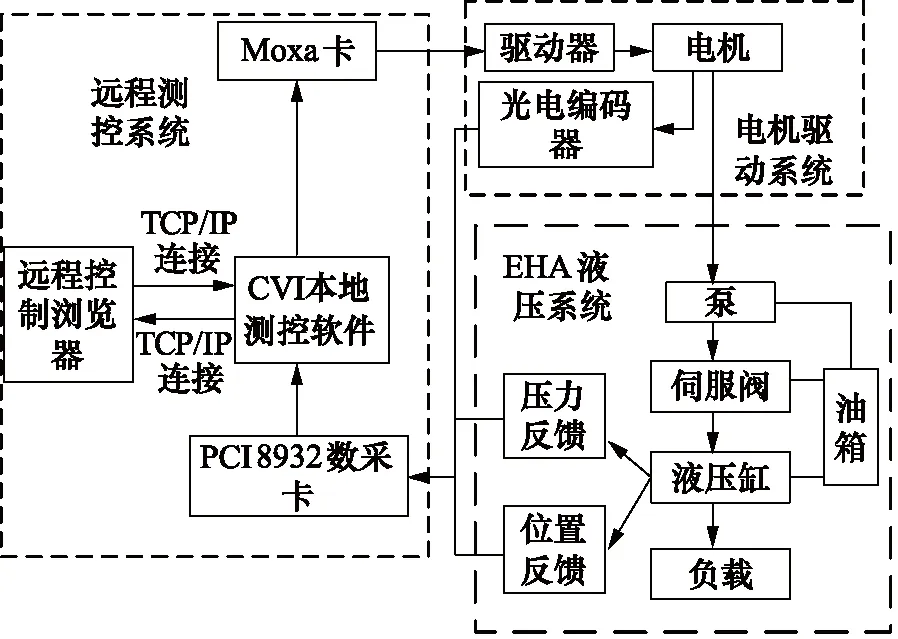
图2 远程EHA控制系统组成
2 EHA伺服教学实验台设计
2.1 EHA液压系统设计[10-11]
EHA液压系统采用阀控缸式结构,通过控制伺服阀输入电流,进而控制液压缸输出位移,其系统具体原理如图3所示。
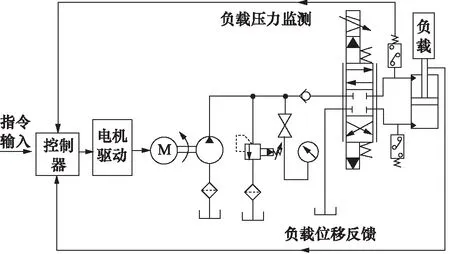
图3 EHA液压系统原理图
(1) 选定系统压力:由于实验台为教学演示实验台,为保证实验者安全,限定该系统最大负载力为900 N,EHA系统的设计压力p=3 MPa。
(2) 液压缸尺寸参数:由于该EHA系统具有高集成特性,这里主要计算液压缸内径,计算公式为:
(1)
式中,D—— 缸筒内径,mm
F—— 负载(取最大负载),N
p1—— 供液压力,Pa
W—— 机械效率(初算取0.9~0.95,本系统取0.9)
经圆整后取标准值D=20 mm。为保证刚性要求,活塞杆直径为15 mm。
本研究EHA作动系统选用单活塞杆双作用液压缸,有杆腔与无杆腔通过输入不相同的压力和流量的油液,实现往复运动。液压缸主要受推力,液压缸筒的材质为45号钢;EHA壳体设计采用封闭集成设计思想,实现伺服阀板式连接,微型电机泵插装连接,实现了全部液压元件的集成连接设计,最大限度的减小EHA系统的体积和重量,图4为实验台EHA装配图。
2.2 加载系统设计[12]
为了测试EHA系统各项性能,需要匹配加载系统,实验台加载系统液压原理图如图5所示。一般加载系统采用阀开口控制系统载荷,无法达到需要的响应速度以及调节精度,难以为EHA系统提供更丰富的负载加载波形。对于EHA系统加载系统,必须能为系统提供需要的载荷,同时为了验证EHA系统是否具有足够的刚度,需要加载系统能提供干扰作用,进而确定出系统的静刚度是否满足设计要求。加载系统的连接点只有1个,所以采用单活塞杆双作用液压缸,在液压缸活塞的顶端安装拉压力传感器,侧面安装有直线位移传感器,实时采集系统输出量。
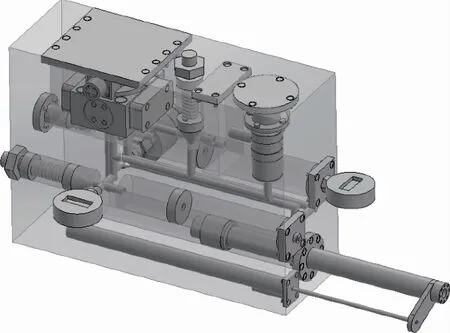
图4 EHA装配图

图5 加载系统液压原理图
3 实验台硬件测控系统设计
实验台测试部分(反馈通道)主要采用PCI8932数据采集卡,通过PCI卡槽与工控机通信,通过数据线连接外置端子板,与拉压力传感器和位移传感器连接,如图6所示。

图6 测试系统方块图
实验台控制系统前向通道主要采用串口Moxa卡与电机驱动器通信,用于发送实时指令,电机驱动具有数模转换功能。加载系统伺服阀控制采用PCI8932模拟量输出功能,为伺服放大器提供±10 V直流电压,该部分如图7所示。
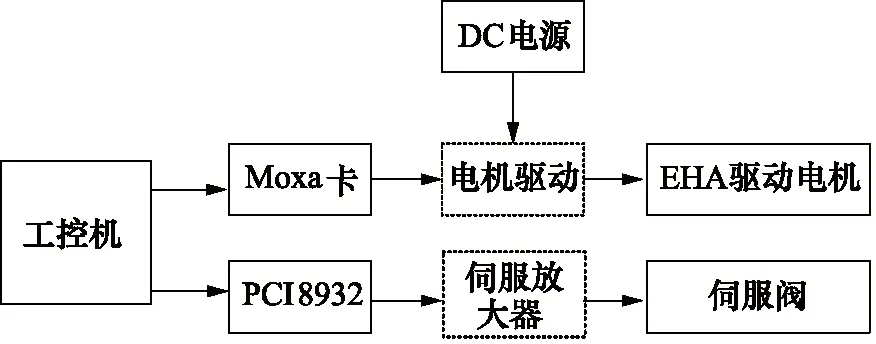
图7 系统前向通道方块图
4 实验台软件设计
4.1 本地软件设计
实验台软件本地测控程序采用LABWindows/CVI进行编写,本地软件测控设计[13-15]采用模块化设计思想,具有较强的可移植性,主要考虑学生在实验台练习本地测控软件编程时,能对模块随意组合,提高学生编程效率,实验台本地软件总体架构如图8所示。

图8 实验台本地软件总体架构图
界面设计划分为3个区,分别为EHA伺服加载控制区(如图9所示)、实验管理综合控制区(如图10所示)、记录数据区。在EHA伺服加载控制区可以对EHA及加载系统进行PID闭环控制;实验管理综合控制区主要控制本地模式还是远程模式,如果选择控件处于本地模式将只能进行本地实验,该区还可以控制系统液压油路并显示油路压力信息及位移信息;记录数据区主要作用是显示实时数据,并将所用数据点导出用于曲线后期辨识研究。

图9 EHA伺服加载控制

图10 实验管理控制
4.2 Web远程控制界面设计
如图11所示,该远程控制界面采用了樊泽明教授的发明专利“一种理论与实验一体化同步教学系统”,由现场视频、采集显示和操作界面3部分构成。现场视频负责实时监测实验室内设备的运行状态;采集显示负责将传回的传感器采集量以曲线的形式在页面显示;操作界面提供实验排队、控制参数设定等操作功能。开始实验前,学生需要先“点击排队”,若此时设备空闲,则直接进入实验,否则等待队列之前的学生完成实验后,方可进入实验。系统为学生权限分配的实验时间为5 min,教师为45 min。若计时结束前未“退出实验”,系统会自动移除当前实验用户,将队列中的用户按顺序推入实验。
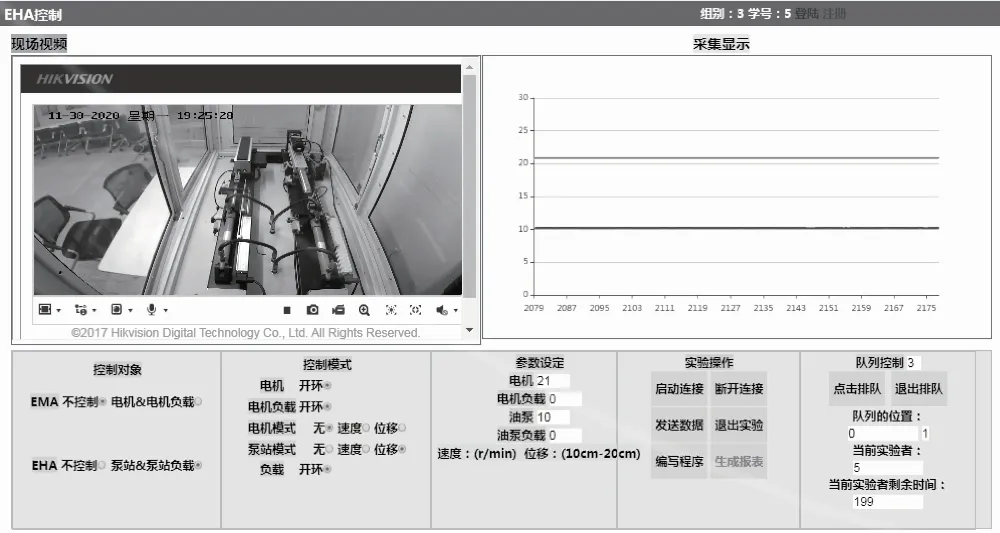
图11 Web远程控制界面
该实验界面有默认与自定义两种操作模式。默认操作模式下,只需要在操作界面选择被控对象的控制模式,设置对应被控对象的控制参数(运动方式与幅值);设置完成后,点击“启动连接”按键,与实验室工控机建立远程连接;连接成功后点击“发送数据”,此时,可以在页面的视频窗口实时监测被控对象的运行情况,同时右边的采集窗口显示被控对象的反馈曲线(位置);选择不同运动方式与控制参数值,运行后观察不同情况下被控对象的运行状态与反馈曲线的变化规律。EHA的输出端安装有泵站负载来模拟翼面负载,从而达到仿真舵面的控制效果。学生通过EHA伺服控制理论的学习,结合在网络下对EHA单独控制,更加深刻理解伺服控制原理,拓展液压传动、机电传动、分布式控制、建模仿真、计算机控制等多个学科视野,使学生深入了解这一分布式作动系统的组成、原理和特性。
5 实验效果展示
登录校内服务器网址后,即可进入实验系统界面,有3种用户选项,学生、老师、管理员。对于学生用户需要注册,才能正常登录,注册界面如图12所示,老师及管理员用户无需注册,直接通过系统设定用户名及密码登录。

图12 学生注册界面
注册后直接登录,选择需要进行的实验项目EHA,即可进入图11所示的远程控制界面。为了保证学生有序实验,需点击排队,否则不能进行实验,这时可以看到自己所处的队列位置,队列位置为0,说明当前可以进行实验。点击实验操作下方“编写程序”按键,操作界面下弹出在线编程面板,学生在代码编辑区域用编程语言编写数字PID 控制器算法,如图13所示,该程序的作用是控制EHA位移。
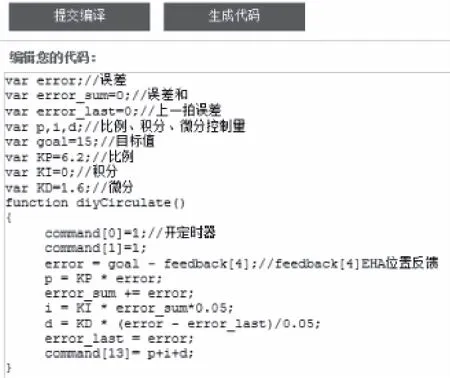
图13 在线编程面板
编辑完成点击“提交编译”、“生成代码”,并“启动连接”,这时即可在图11采集显示窗口观察到曲线,如图14a所示。

图14 EHA响应曲线
可以看出,目标值为15 cm,而系统输出存在明显的稳态误差,主要原因是控制器采用PD结构,由于系统缺少积分作用,导致系统型别不足,所以始终无法消除稳态误差。将EHA输出位移退回10 cm,待其稳定,重新设定控制器参数,KP设为5.6,KI设为0.8,KD设为1.9,这时输出曲线如图14b所示,可以看出由于加入了积分控制,使系统型别增加了一级,这时固定输入的稳态误差为0。
6 结论
以上实验,学生通过网络编程,加深对控制算法的理解,同时通过实时传输的数据验证算法的优劣,培养学生工程调试能力,且实验质量和在实验室做本地实验一样,网络实验相比本地实验,还可以避免学生因为误操作,导致实验系统瘫痪的风险,这一优点必将使网络化成为未来高校实验系统的发展趋势。设计的网络化EHA伺服教学系统,是对未来教学模式发展的探索。在实际的教学中,取得了令人满意的教学效果,主要体现在以下几个方面:第一,使课堂变得更生动有趣;第二,学生在课下可以方便的实现远程实验,获得需要的数据,最大限度的服务学生;第三,这种先进技术在教学中的加持可以提升学生的科技视野,激发学生的创新精神。
猜你喜欢
装备制造技术(2021年1期)2021-05-21
铁道通信信号(2020年11期)2020-02-07
汽车与新动力(2019年5期)2019-11-07
铁道通信信号(2019年1期)2019-03-21
测控技术(2018年2期)2018-12-09
电子制作(2017年9期)2017-04-17
山东工业技术(2016年15期)2016-12-01
太空探索(2016年12期)2016-07-18
工业设计(2016年11期)2016-04-16
电子器件(2015年5期)2015-12-29
