应用物联网技术的智能停车引导系统
2021-05-07 05:35袁珍
黎明职业大学学报 2021年4期
袁 珍
(黎明职业大学 通识教育学院,福建 泉州 362000)
随着我国综合国力的提升,汽车的数量越来越多,在一些大城市和沿海经济发达地区最为明显。目前,随着大型商场、住宅小区的出现,大面积多层停车场层出不穷。对于很多新建居民区和商业区而言,停车场管理系统已经成为了配套设施。由于车辆多、停车场面积大,缺乏系统规划、管理混乱等原因,导致停车场的利用效率低下。用户需要在驾车入场时寻找空位,离场时取车找车和寻找出口,花费时间较多,容易造成拥堵。这使得车辆的智能引导技术也越来越受到关注。人们更愿意使用一个运行效率高、直观可靠的可视化引导系统。因此带图形界面的空位识别引导停车系统将有着非常广泛的应用前景。
物联网技术的发展为解决这一问题提供了很好的思路,可以通过计算机技术、网络设备、车道管理设备等搭建一套具备空位智能识别、场内车流引导等功能的停车系统,从而为用户提供更方便、直观、快捷的停车方法[1-3]。实现智能停车系统是一个复杂的过程,本文在阐述技术实现时,有选择地涉及其中几个内容,重点针对无线传感网络和辅助停车系统开展研究,研究停车场内精确选择车位的方式,并构建基于最佳路径优化选择的停车辅助系统。
1 无线传感网络
无线传感网络的主要功能是空位识别和车辆信息登记,这是智能引导的前提。系统会将识别出来的空位体现在车库环境模型中,方便用户停车取车,也为后面的路径引导提供目标位置[4-5]。据此,本系统基于物联网环境,对停车引导系统的各个模块芯片进行分析选型,设计硬件电路并进行测试,建立一个集数据采集、分析、控制、引导于一体的无线传感网络,为整个停车场方案实施提供硬件基础。采用了嵌入式模块作为主控制端,用Zigbee(“紫蜂”,一种低速短距离传输的无线网上协议)模块采集和传输信息,再结合多个传感器构成一个无线传感网络,系统框架如图1所示。
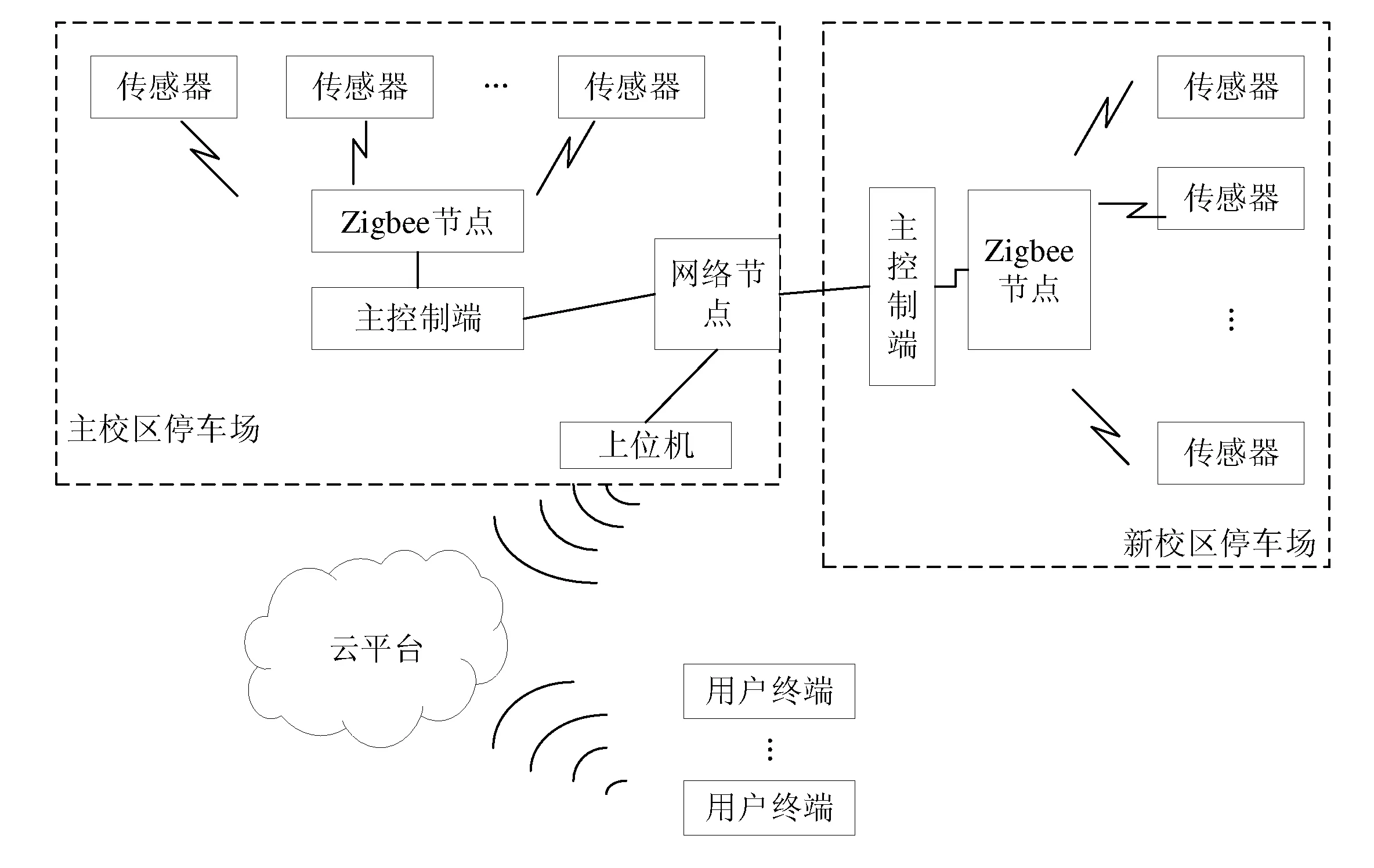
图1 无线传感网络框架
在主控制器的选择上,考虑到停车场车辆众多,需要上传位置信息和车牌信息,并且需要在主控制器上安装路径识别算法,因此主控制器必须具备一定的数据处理和存储能力,在数据处理速度上也有一定的要求。因此,本系统选用了集成ARM(先进的精简指令集处理器)单片机和DSP(数字信号处理)芯片的LM3S5749,此芯片功耗低、运算精准,同时具备了主控功能和数据处理功能。
空位识别可使用的传感器有很多种,例如超声波传感器、光敏传感器、红外检测器等。经过测试,本系统采用了灵敏度高、分辨率大的磁阻传感器。目前多数停车场都是用红外线或超声波检测器进行空位识别,而经过调研发现,这两种传感器存在着精度低、易损坏等缺陷。在本系统中,空位识别是后期停车线路规划的前提,需要降低传感器故障的几率,提高精度,因此选用的磁阻传感器更加适合这一场景。
传感器节点通过IIC(集成电路)总线与Zigbee终端监测节点CC2530连接,监测车位状态。信息采集终端电路如图2所示。
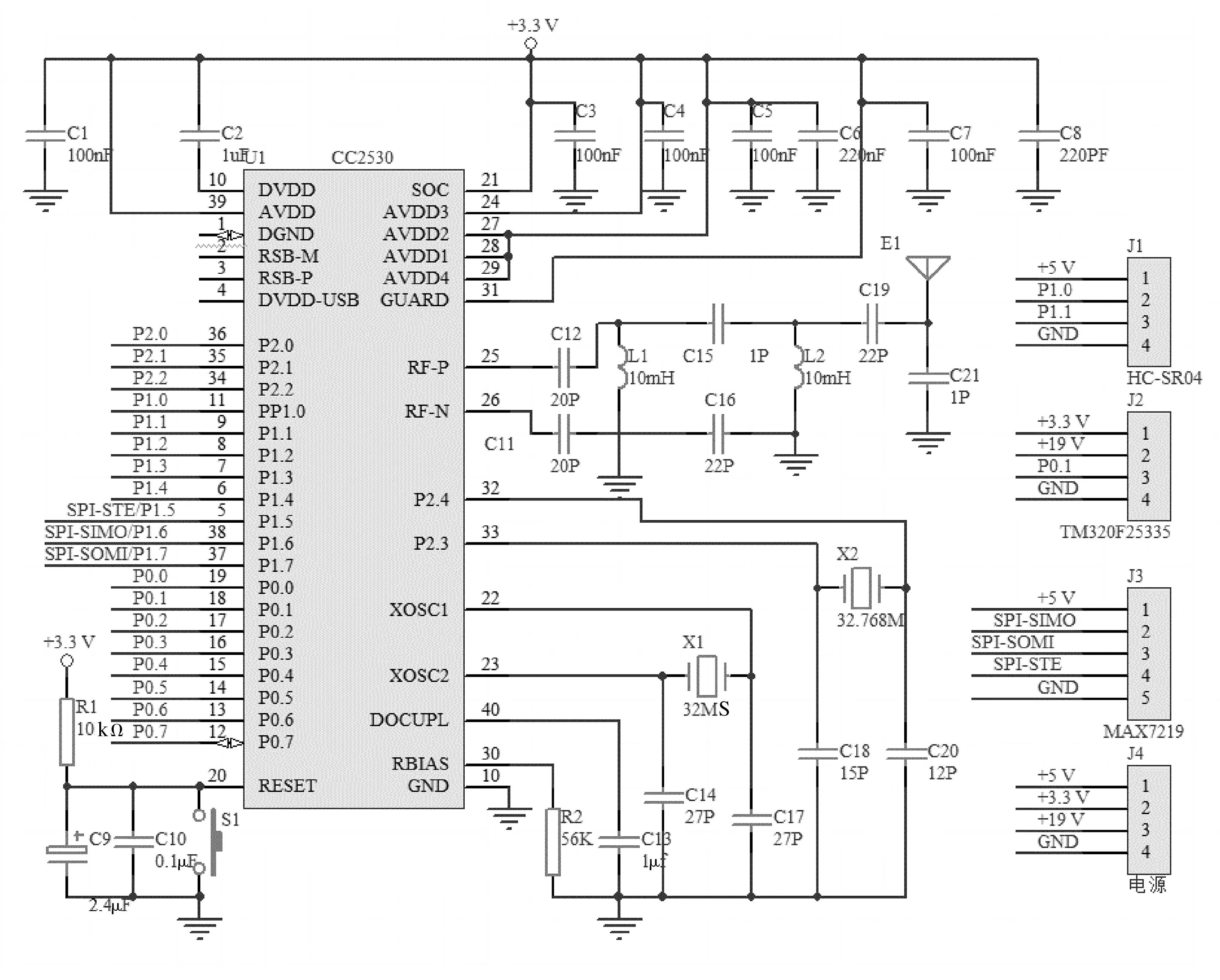
图2 信息采集终端电路图
利用Zigbee无线传输将信息发送至ARM主控平台,经过对车位信息的存储、处理,通过路由节点将信息发送至上位机,通过路由节点的设置实现停车场与汽车用户之间的消息发送、传递与接收。
2 智能诱导停车路径算法
2.1 选择最优车位
非智能车位选择办法一般是由用户自行选择,但由于对停车场不熟悉等原因,选择的停车位不是最合适的。本算法是从用户角度看待问题,考虑目标停车位距停车场入口距离、出口距离及两侧车位占用情况等因素,为用户选择最合适的停车位。
停车场空位实例及简化停车场模型为二维有向带权图,如图3、图4所示。其中Ri为路径编号,Si为空位编号。
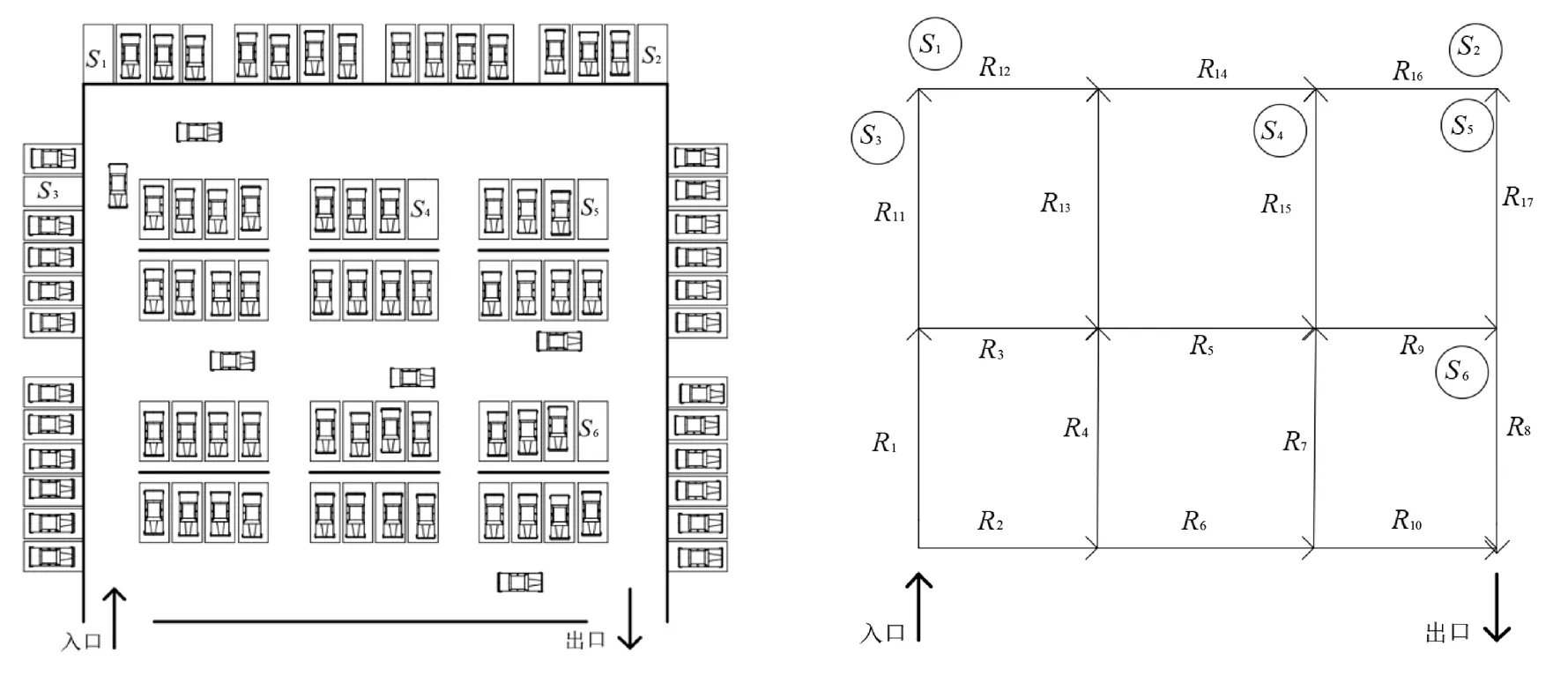
图3 停车场空位实例图 图4 二维有向带权图
通过车位检测模块得到停车位占用信息,分析行车时间、车位类型等因素,确定若干备选停车位,考虑场内车流量和距离出入口距离等因素赋予每条有效路径适当的权值。设停车场内每条道路的实际车速为V〈Ri~Rj〉(i,j=1,2,3,…),停车场内车速上限为V1,则某条道路(编号为i~j)上的实时车速为:
(1)
式(1)中μ为车流量系数,通过实际停车场内统计数据得到。
根据式(1)由实际测量的道路距离除以速度即可得到每条道路的权值:
(2)
假设目标路径长度为D,停车场内车辆行驶平均速度为V1、步行速度平均为V2,由此可计算出用户从入口至停车位停好车,再步行至出口的总时间如下:
(3)
其中:T′为泊车所需时间;α为时间系数,取值为0~1,可通过改变α的大小来调整行车时间和步行时间的比重。
在本系统的测试过程中,大部分情况下选取α=1,忽略步行时间。根据公式计算入口至各备选停车位的总时间T,当式(3)中T最小时,也就是停车所用时间最短,那么该备选车位即可选为当前目标车位。
2.2 路径规划
Dijkstra算法是很经典的单源最短路径算法,能够计算出从一个指定节点到其他所有节点的最短行车路线。计算原理是从起始节点开始逐步向外围搜索,遍历停车场模型中的所有节点,直至搜索至出库,得到最佳路径。其缺陷是计算速度慢,工作效率低。在实际应用时,一般都会加上各自的预处理方法:分层或预计算。由于各停车场内环境不相同,相对复杂,本算法将对传统的Dijkstra算法进行改进。利用有向带权图,将路径赋予一定权值,权值满足条件的道路才予以考虑。
为了简化,将车位和停车场内的路径均看成节点,并进行编号,在搜索路径时将车位节点和路径节点分开处理。首先处理路径节点:根据上文得到的目标车位位置,得到其所在目标路段编号。建立两个路段节点集合M、N,集合M中包含入口路段节点及其最小权值,集合N中包括其他路段节点及其对应权值。从N中找出权值最小的节点,将其移至集合M中,并更新集合N中的权值。重复这一操作直到目标道路节点出现在集合M中,这时只需将入口道路节点与集合M中出现的节点连接起来,即可构建最优行车路线。具体流程如图5所示。

图5 路径识别流程
2.3 测试效果
硬件测试时,编写简短的测试程序烧录至ARM主控平台,主要检测磁阻传感器能否实时更新车位的占用情况,数据能否通过ZigBee无线网络传输至主控平台。并测试各种干扰情况是否会影响数据的准确度、完整度。经测试,数据采集终端运行正常,无线网络传输正常,符合预期目标。
软件测试以图3为停车场平面模型和实时车况参考,检测软件是否能正确找到有效路径。首先需要根据备选车位、距离入口距离、道路情况等确定最优停车位。根据空位识别得知,当前停车场共有6个空位,编号为Si(i=1~6)。车场内每条路径的长度是不变的,只考虑道路距离权值的话,S3即为最优车位,可系统计算时综合考虑了距离权值和道路状况权值,S3车位所在路段R11当前路况较为拥挤,路段权值过大,不予考虑。综合考虑后,选取了S4节点为最优车位,根据系统的路径规划算法规划出最佳路线为:入口—R2—R4—R13—R14—S4,路径如图6所示。可以看出,最终设计的路径有效地避开了R3、R5、R11、R12等拥挤路段。

图6 路径识别结果
3 信息的处理和发布
在信息采集和处理端,主要采用了C语言来开发设计软件程序,大大降低了开发难度。并结合MySQL(关系型数据库管理系统)数据库,存储车位和车辆信息,可以满足服务器的使用需求。
在信息传送和发布端,软件方面需要实现的功能是:当有车辆入场时,首先确定所有空位位置信息,再利用路径规划算法,定位最优车位,并提供最优停车路线;通过网络设备将以上信息推送至服务器,通过服务器的可视化界面,将信息发布在用户终端(目前主要是在web端)上,引导用户驾车至最优停车位。
信息发布端采用B/S(浏览器/服务器)架构,实现了客户端的统一,将功能实现部分集中在云端(服务器),终端只需安装浏览器即可实现与服务器数据库的信息共享,简化了客户端的功能。具体实现过程是:用户通过浏览器向服务器发送请求,服务器端接收、处理请求并产生响应,把用户请求的数据(这里主要是车位信息和路线图)返回到浏览器;浏览器解释执行HTML(超文本标记语言)文件,呈现在用户界面上。另外,系统利用了RSTP(快速生成树)协议实现信息的发布。RSTP是一种主机和服务器之间的双向通信协议,可以实现声音和影像等多媒体信息的传送,在本系统中传递的主要是车位和路线信息。
4 结束语
在停车场智能引导系统的研究开发过程中,主要实现了停车场空位实时识别并生成相应平面图、识别出最佳空位和最优引导路径。该系统在投入应用后,可以提高大型停车场的车位利用率及运行效率,为用户节省时间,进而提高停车场的管理水平和服务质量。另外,本系统具有可视化界面,针对某一停车场环境进行建模,实时显示停车位的空闲或占用状态。当汽车驾驶人驶入停车场区域内时,即可通过终端平台(手机APP)查看空闲车位位置,并迅速停车。若驾驶人不熟悉环境,可选择停车空位项进行停车诱导;系统将采用图形界面提示或者语音提示的方法进行停车诱导,帮助驾驶人提高停车效率。
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
英语文摘(2020年7期)2020-09-21
校园英语·月末(2019年11期)2019-09-10
环球时报(2019-07-24)2019-07-24
作文中学版(2018年1期)2018-11-28
读书文摘·经典(2017年8期)2017-08-09
喜剧世界(2016年14期)2016-11-26
科技视界(2016年1期)2016-03-30
物联网技术(2015年7期)2015-07-21
读者欣赏(2014年6期)2014-07-03