
永磁同步电机无传感器控制及在线参数辨识
2021-05-06 03:27:44孔丽丽易春求刘文通
组合机床与自动化加工技术 2021年4期
孔丽丽,易春求,刘文通
(1.中国计量大学机电系,杭州 310018;2.奥的斯机电电梯有限公司开发部,杭州 310019)
0 引言
永磁同步电机(PMSM)被广泛应用在机床、新能源汽车、工程机械、家用电器等领域。它具有结构简单、质量轻、体积小、效率高、调速范围宽等优点。在传统的PMSM调速系统中,为实现闭环控制,必须使用光电编码器、磁编码器等传感器测量电机转子的位置和转速。这样,不仅会增加系统的体积和生产成本,而且会增加系统故障率,降低系统的抗干扰能力。因此,采用无传感器的电机控制系统将是未来发展趋势[1]。
另一方面,随着对PMSM控制系统精度和稳定性要求的提高,控制系统中电机的参数必须足够准确。因此,实时地获取精确的电机参数对控制系统稳定性非常重要。理想情况下电机自身参数是常数。然而随着电机运行,内部环境变化如温升磁饱和等因素影响,PMSM的定子电感、定子电阻、磁链等参数都会发生变化,系统必须具有实时在线修正电机参数的功能。
对无传感器的PMSM控制系统而言,准确估计电机转子的位置和速度是控制系统实现的首要任务。目前,广泛研究和应用的方法主要有:电压电流检测法、观测器法、卡尔曼滤波、模型参考自适应法、旋转/脉振高频注入法、神经网络、模糊控制[2-10]。这些方法的实现,都离不开电机模型,离不开准确的电机参数。在线参数辨识并不是孤立于PMSM无传感器控制系统存在的,而是相关联的。在线参数辨识常用的方法有:卡尔曼滤波法、最小二乘法、遗传算法[11]。遗传算法能对定子电阻、永磁体磁链以及电感进行辨识,具有收敛速度快、鲁棒性好的优点。本文采用滑膜电流观测器估算电机转子的位置角度和角速度。采用遗传算法对电机参数进行在线修正辨识,将得出的定子电阻Rs、电感L送入滑膜电流观测器,估计出电机转子的位置和转速。在MATLAB/Simulink中对永磁同步电机无传感器控制系统进行了仿真研究。将滑膜观测器和遗传算法同时引入到PMSM控制系统中,两种方法在统一的电机模型中完成,具有估计准确、收敛速快等优点,避免了繁琐的不同坐标系下的电机建模。
1 永磁同步电机的数学模型
为了简化建模过程,在建立永磁同步电机的数学模型时作如下假设[12]:①不考虑电机定、转子的铁芯饱和效应;②忽略电机的涡流和磁滞损耗;③永磁材料的电导率为0,永磁体内部的磁导率与空气磁导率相同;④电机稳定运行时,三相绕组的电流波形为标准的正弦波。
PMSM数学模型包括a-b-c三相坐标系、α-β两相静止坐标系和d-q两相同步旋转坐标系下三种数学模型。不同的坐标系下,PMSM的数学模型也不同。PMSM在α-β两相静止坐标系下电压方程:
(1)
式中,uα、uβ为定子α轴、β轴电压;iα、iβ为定子α轴、β轴电流、L为定子电感;Rs为定子电阻;eα、eβ为定子α轴、β轴反电动势。
由PMSM的运行原理可知,反电动势与磁链、转子角速度有关,反电动势方程为:
(2)
式中,ψ为转子永磁体磁链;ω为转子角速度;θ为转子位置。
对式(1)进行变形得到电流的方程:
(3)
2 滑膜电流观测器设计
滑模控制是一种变结构控制策略,与常规控制的根本区别在于控制的不连续性,具有控制系统结构随时间变化的开关特性。因此,滑膜控制非常适用于PMSM电机运行中定子参数会不断变化的控制系统。且滑动模态不受系统外界干扰的影响,因此,使用滑模控制的系统具有很好的鲁棒性。滑膜电流观测器的设计步骤为:①由PMSM两相静止坐标系模型,设计一个滑膜电流观测器;②由滑膜电流观测器模型导出电流观测值;③将电流观测值和电流实际值作差,得出电流误差的状态方程;④由误差方程得出反电动势观测值,依据反电动势观测值可以估算出转子位置θ;⑤对位置θ进行微分可以得出角速度ω。
首先,设计滑膜函数为:

(4)
根据α-β两相静止坐标系数学模型式(3),构建含有电流估计值的滑膜电流观测器模型:
(5)

(6)
(7)
K为滑膜观测器增益。
对比式(3)和式(5),这两个公式应该是等效的。可以得出:
(8)
(9)
对式(9)微分之后得出转子角速度的观测值:
(10)

图1 滑膜电流观测器原理图
3 遗传算法在线参数辨识
遗传算法是在计算机辅助基础上不断迭代来完成的。PMSM的数学模型属于连续系统模型。因此,必须将PMSM的数学模型式(3)转换成计算机可以处理的形式,即对上述电机数学模型进行离散化处理。设采样周期为T,离散序号为n(n=0,1,2……)。在采样周期T足够小的情况下,可以用差分代替微分的方法将上述模型离散化。
在数学模型式(3)的基础上进行采样周期T的离散化处理。结果为:
(11)
式中,
(12)
显而易见,应以电流作为等价系统的可测量的矢量,根据式(11)构建电流等价跟踪模型:
(13)

(14)
于是将辨识Rs和L的问题转换为基于遗传算法求目标函数J取最小值时的Rs和L的参数辨识问题。在满足J最小时,可以求出K1和K2的值。然后通过式(12)反求出Rs和L。通过遗传算法的不断迭代,可以对Rs、L进行在线修正辨识。

图2 在线参数辨识框图
4 仿真与分析
为了验证方案的可行性,根据图3所示的系统控制框图,在MATLAB/Simulink中搭建系统仿真模型。电机控制采用的是SVPWM空间矢量控制方式。系统包括SVPWM矢量控制模块、逆变模块、PMSM电机模块、必要的坐标系变换模块、滑膜电流观测器及在线参数辨识模块、速度环控制模块ASR、电流环控制模块ACR。uα、uβ、iα、iβ作为滑膜电流观测器的输入,ω是滑膜电流观测器输出值,将估算出的角速度ω作为反馈与给定转速ω*形成速度闭环控制ASR。uα、uβ、iα、iβ为在线参数辨识模块的输入量,经遗传算法参数辨识模块的辨识,能针对电机的不同运行状况不断修正电机参数Rs和L。实验选用隐极式永磁同步电机,其参数为:定子电阻Rs=0.2 Ω,定子电感L=8.6 mH,极对数P=3,永磁体磁链F=0.18 Wb,转动惯量J=0.008 kg.m2。

图3 PMSM控制系统框图
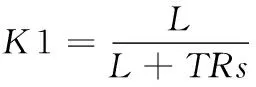
图4所示的是电机给定转速为600 r/min时的永磁同步电机转子实际位置角度和实际转速波形。算法可以很好的估算出电机实际转速。稳定运行后转速的估算误差为10 r/min。收敛速度快,时间约为0.025 s。系统稳态和动态性能良好。图5所示的是电机给定转速为800 r/min时的电机转子位置角和转速波形。稳定运行后转速的估算误差为18 r/min。转速收敛时间约为0.03 s。依旧保持良好的稳态和动态性能。图6给出的是电机转速从600 r/min变化到800 r/min时转子位置角度和转速的波形图。在电机速度发生变化时,速度估算误差仍能保持在20 r/min,动态响应时间约0.03 s。在电机速度发生动态变化时,该方法能快速地响应电机速度变化。
电机运行过程中受各种内外条件的影响,电机参数经常发生变化,辨识算法需具有较好的跟随性才能对电机参数进行更准确地辨识。实验所用电机的定子电阻Rs=0.2 Ω、电感L=8.6 mH。图7和图8是对电机电阻和电感的辨识波形,可以看出最终的辨识结果都能收敛到真实值,说明这种方法对定子电阻的辨识和电感的辨识具有较高的准确度。

(a)位置角度 (b) 转速图4 转速600r/min的转子角度和转速波形

(a)位置角度 (b) 转速图5 转速800r/min的转子角度和转速波形
(a)位置角度 (b) 转速图6 转速600r/min变到800r/min的转子角度和转速波形
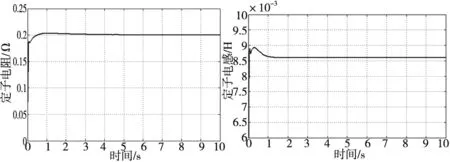
图7 定子电阻辨识曲线 图8 定子电感辨识曲线
5 结束语
为解决传统永磁同步电机有传感器控制方法存在的不足以及电机参数受影响会发生变化的问题,提出了一种滑膜电流观测器加遗传算法参数辨识无传感控制闭环策略。搭建系统仿真模型,并进行仿真验证。实验表明,在较大的调速范围内,所提出的方法能快速、准确地预估出电机的位置角度和速度。对电机的定子电阻和电感都能很快收敛至真实值,具有较高的辨识精度。能够满足永磁同步电机无传感器控制的场合。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17 06:26:42
建材发展导向(2021年14期)2021-08-23 00:57:20
上海大中型电机(2021年2期)2021-07-21 03:01:32
防爆电机(2020年6期)2020-12-14 07:16:54
中国组织化学与细胞化学杂志(2016年3期)2016-02-27 11:15:41
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
电测与仪表(2014年11期)2014-04-04 09:21:36
西南医科大学学报(2014年6期)2014-03-20 15:43:47
