大型飞机多轮多支柱起落架载荷飞行研究
2021-05-06 03:06汤阿妮郭正旺
南京航空航天大学学报 2021年2期
汤阿妮,郭正旺,赵 华
(1.中国飞行试验研究院飞机所,西安710089;2.中国飞行试验研究院科研管理部,西安710089)
由于机场跑道及机身强度的限制,大型飞机多采用多轮多支柱起落架形式[1-2],以降低起落架作用于机体和跑道道面的集中载荷。多支柱起落架载荷是个超静定问题,牵扯到前、后多对主起落架缓冲刚度匹配,因此多支柱起落架布置、地面载荷确定以及缓冲功量分配的设计方法等具有不确定性。多轮多支柱起落架是中国在某大型运输机上首次采用的起落架结构形式,各支柱间载荷分配、缓冲刚度匹配无相应的设计规范,中国国内亦无该形式起落架设计及布局的相关设计经验[3]。为解决多支柱起落架载荷分配问题,国内对多支柱起落架着陆及转弯载荷进行了大量仿真分析[4-9],牟让科等将落震试验结果与仿真分析结合,对多支柱起落架载荷分析又前进了一步[10]。但实际飞机及起落架结构是及其复杂的,仿真结果的正确性及可靠性通常无法保证。为彻底解决多轮多支柱起落架载荷分配问题,并对大型飞机起落架设计使用寿命进行探索研究,以便获取可靠的设计支持数据,必须通过实际飞行试验进行多支柱起落架使用载荷研究。
本文采用应变法,以伊尔76 飞机主起落架为研究对象,在中国国内首次实测了多轮多支柱起落架载荷,对多轮多支柱起落架着陆及转弯载荷进行定量分析研究,揭示了多轮多支柱起落架着陆及转弯载荷的规律,为中国大型运输机起落架结构设计和验证及大型运输机的研制提供参考。
1 试验机及测载试验
1.1 试验机
试验机为引进的俄罗斯大型多轮多支柱起落架飞机伊尔76 飞机,该机起落架为五支柱前三点式布局,有1 个前起落架,4 个主起落架。主起落架为四轮并列支柱式,对称布置在机身两侧。前、主起落架均可收放,并装有良好的减震装置。每个主起落架均为带有可折斜支撑的单支柱套筒式四轮起落架,由承力构件、4 个带盘式液压刹车装置的机轮、收放机构和舱门传动机构等组成。前起落架为单支柱摇臂式四轮起落架,由承力构件、4 个带液压自动刹车装置的机轮、收放机构和舱门传动机构等组成。为改善地面滑行转弯时的灵活性,前起落架上还装有CyC-76 前轮转弯操纵系统。图1 给出了试验飞机及其起落架实物图。

图1 伊尔76 飞机及其起落架Fig.1 Aircraft IL76 and the landing gears
1.2 应变法测载
载荷测量采用应变法[11-12]。应变法测量起落架结构载荷要在结构受力分析的基础上,在测载结构主要传力部位安装应变计电桥,模拟结构实际受载情况,对测载起落架进行加载校准,建立的载荷模型为

式中:F 为起落架外载荷,包括垂向载荷、航向载荷、侧向载荷等。其中垂向载荷作用于机轮中心,指向上为正,用Pz表示;航向载荷在水平面内,垂直于垂向载荷,在着陆及滑行使用情况,作用于机轮中心,向前为正,用Px表示,刹车状态仅适用于主起落架,作用于轮胎接地点,恒指向后;侧向载荷垂直于xoz 平面,作用于轮胎接地点,对主起落架指向内侧为正,对前起落架指向右侧为正,用Fy表示。ε 为应变计电桥响应;β 为载荷系数,载荷校准时确定;n 表示电桥数。
图2 给出了主起落架轮轴及支柱部分应变计安装照片。
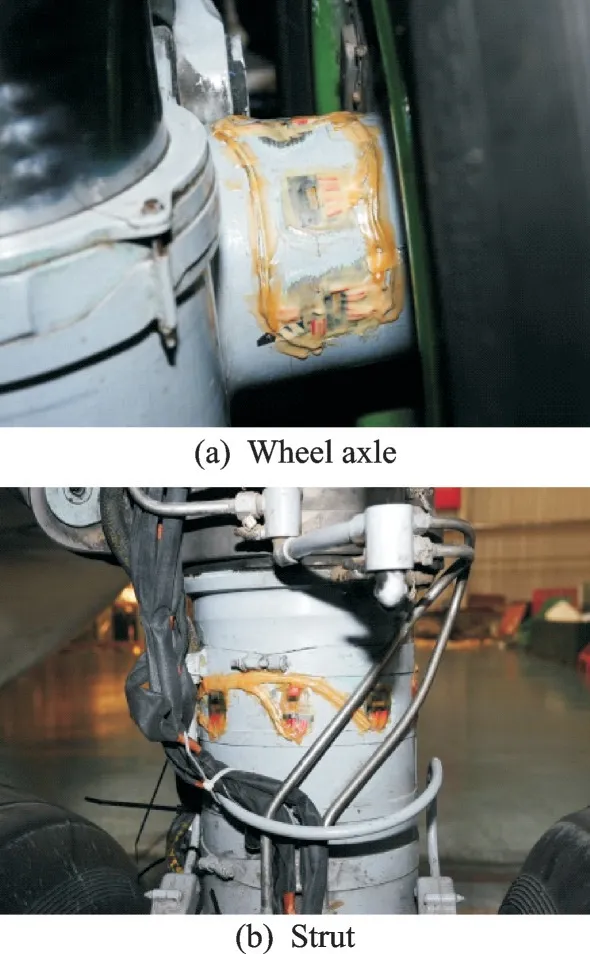
图2 部分应变计电桥加装示意图Fig.2 Sketch of some strain gauge bridges
1.3 飞行试验
起落架的载荷使用情况包括着陆、转弯、刹车和滑行等[12-14]。为了获得起落架在不同使用状态下的载荷,试飞科目包括最大起飞重量起飞、最大着陆重量着陆、大下沉速度着陆、大刹车压力刹车、大速度转弯及地面滑行等。本文对着陆和转弯情况进行分析。飞行试验过程中,测试参数除了直接用于载荷实测的应变参数外,还包括飞机重心三向过载、着陆下沉速度、着陆水平速度、着陆姿态角、滑行速度和燃油重量等飞行参数,以及起落架缓冲器行程、前起落架转弯作动器行程、主起落架刹车压力等起落架特征参数。
2 数据处理方法
2.1 无量纲化
将实测载荷除以对应起落架的停机载荷,计算载荷系数,以消除飞机重量对起落架载荷的影响

式中:Px、Pz、Fy分别为航向载荷、垂向载荷及侧向载荷;px、pz、py为对应载荷系数;Ptj为对应起落架的停机载荷,表示停机状态每个起落架承受的飞机重量。
2.2 载荷正确性分析
取着陆阶段飞机升力等于重力,地面滑行阶段忽略升力,对载荷实测结果正确性进行分析,即有

式中:nx、ny、nz分别为飞机重心处航向、侧向及法向过载;G 为飞机重量;Psl为飞机升力;PE为发动机推力;Pxi、Pzi、Fyi中下标1 到5 分别代表前起、左前主起、左后主起、右前主起及右后主起。
2.3 参数相容性分析
验证载荷正确性后,还需对不同受载情况的载荷进行飞行参数相容性分析,如,转弯情况需考虑转弯速度、转弯半径、转弯作动器行程等与载荷之间的匹配关系。一般分析公式可表示为

式中:Vx为航向速度,Vz为垂向速度,φ 及θ 为飞机姿态角,D 为起落架缓冲器压缩行程,DS 为转弯作动器行程,R 为转弯半径,PS 为刹车压力。不同的载荷情况取不同的参数,具体公式形式也不同,如转弯情况,主要参数为转弯速度、半径、转弯作动器行程等,着陆阶段则着重分析着陆下沉速度、着陆水平速度、着陆重量、着陆姿态以及缓冲器压缩行程等参数。在下述转弯载荷分析中将具体说明转弯情况的应用。
3 实测结果分析
3.1 着陆载荷
3.1.1 典型着陆载荷实测结果
图3 给出了2 次典型的着陆状态左侧前、后主起落架载荷及相关飞行参数时间历程曲线。图3(a,b)给出了水平着陆,飞机着陆俯仰角φ 为1.58°,下沉速度Vz为1.1 m/s,着陆重量G 为130 t,前、后主起落架触地时间极为接近时,左侧前、后起落架缓冲器压缩行程(DZQ和DZH)、飞机重心处航向及法向过载(nx和nz)、左侧前、后起落架航向载荷和垂向载荷(PZQx,PZQz,PZHx,PZHz)时间历程曲线。从图3(a,b)中可以看出,左侧前主起落架着陆垂向载荷、起转/回弹载荷均大于后主起落架。
图3(c,d)给出了机尾下沉着陆,飞机着陆俯仰角φ 为7.98°,下沉速度Vz为1.41 m/s,着陆重量G 为142 t,前、后主起落架触地时间差约为3 s 时,左侧前、后起落架缓冲器压缩行程(DZQ和DZH)、飞机重心处航向及法向过载(nx和nz)、左侧前、后起落架航向载荷和垂向载荷(PZQx,PZQz,PZHx,PZHz)时间历程曲线。从图3(c,d)中可以看出,左侧后主起落架着陆垂向载荷大于左侧前主起落架着陆垂向载荷。
表1 给出了4 个主起落架着陆时垂向载荷、起转载荷和回弹载荷实测极大值。

图3 主起落架着陆载荷及相关参数时间历程Fig.3 Curves of main landing gear loads and related param-eters during landing
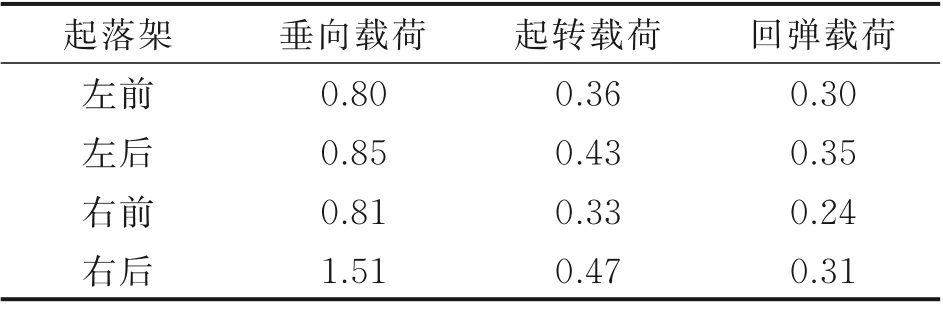
表1 着陆状态主起落架实测载荷极值Table 1 Load extreme value of main landing gear during landing
3.1.2 着陆载荷分析
着陆主要考察起落架承受垂向和航向起转及回弹载荷的能力。着陆垂向载荷大小取决于着陆质量、着陆下沉速度及着陆姿态。下沉速度和着陆质量决定了着陆能量的大小,是决定着陆载荷的关键,对多支柱起落架,着陆姿态(表征为着陆俯仰角和滚转角)决定前、后主起落架触地的时间差,影响前、后主起落架着陆载荷分配。一般情况下,总是后主起落架最先着地,前主起落架再着地,前起落架最后着地。故后主起落架将承担较大的着陆能量,导致着陆载荷较大。为改善前、后主起落架载荷分配情况,一般通过改变缓冲器充填参数的方式[15],以改变支柱刚度,达到使前、后主起落架受载相当的目的。图4 给出了左侧前、后主起落架着陆载荷对比关系,PZQ代表左前主起载荷,PZH代表左后主起载荷。从图4 可以看出左侧前、后主起落架载荷基本相当,右侧主起落架结果类似。

图4 左侧前、后主起落架着陆载荷对比图Fig.4 Comparison of landing loads of left front and rear main landing gears
在载荷设计中,利用不均匀系数表征载荷分配情况,对单侧两支柱起落架,其定义为后支柱最大载荷与前、后支柱最大载荷之和的比值

根据式(4),分别计算着陆时左侧主起落架与右侧主起落架垂向载荷的最大不均匀系数kmax、最小不均匀系数kmin及平均不均匀系数kmea,如表2 所示。从统计学的角度看,该机主起落架着陆载荷分配良好。

表2 着陆状态主起落架垂向载荷不均匀系数Table 2 Ununiformity coefficients of vertical loads of main landing gears during landing
起转与回弹载荷是飞机着陆载荷的重要组成部分。起转载荷取决于着陆时的水平速度、垂向载荷及跑道粗糙度。图5 给出了左前主起落架起转载荷(PZQxQZ)与对应着陆垂向载荷(PZQz)之间的关系曲线,其斜率可达到0.42,相关系数为0.89,即在起落架机轮起转过程中,起转摩擦系数平均值可达到0.42,与小飞机同等跑道飞行状态相比,这一数值偏大[16]。其原因在于该机起落架机轮数目较多、轮胎较宽、轮胎触地面积较大。回弹载荷取决于起转载荷及起落架支柱的航向刚度。实测结果发现,与起转载荷相比,回弹载荷较小,起转载荷平均是回弹载荷的2.7 倍。这是由于较大的起转载荷需要较强的航向刚度,较大的航向刚度则减小了起转时的变形,因此回弹载荷较小。

图5 起转载荷与垂直载荷关系曲线Fig.5 Relationship curve between spin-up load and vertical load
3.2 转弯载荷
3.2.1 典型转弯载荷实测结果
图6 给出了两次连续左转弯过程,前起落架转弯作动器行程(DS)、重心侧向过载(ny) 、4 个主起落架垂向载荷(PZQz、PZHz、PYQz、PYHz)和侧向载荷(FZQy、FZHy、FYQy、FYHy)时间历程曲线。转弯速度为5 m/s,外侧主轮处转弯半径约30 m。由图6 知,转弯时,前主起落架侧向载荷指向转弯圆心反方向,形成了阻碍飞机转弯的力矩。后主起落架和前起落架侧向载荷指向转弯圆心,提供转弯向心力。后主起落架侧向载荷远大于前主起落架。
表3 给出了转弯时4 个主起落架垂向载荷与侧向载荷系数实测极大值。4 个主起落架垂向载荷极值均大于其停机载荷,最大达1.66。后主起落架侧向载荷系数最大达0.47。由此可见,对多支柱起落架而言,转弯状态比着陆状态受载情况更加严重。
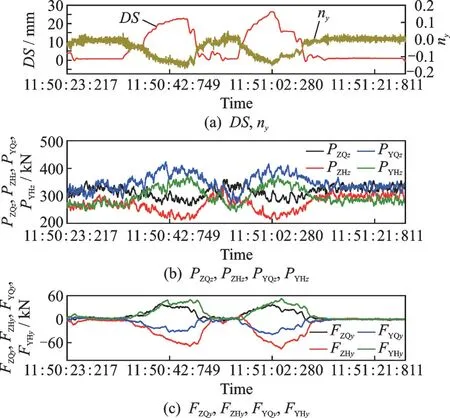
图6 主起落架转弯载荷及转弯作动器时间历程Fig.6 Curves of main landing gear loads and related param-eters during turning
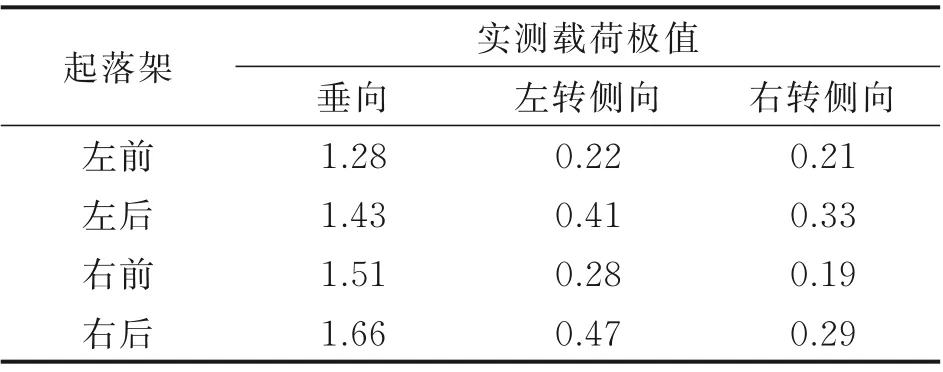
表3 转弯状态主起落架实测载荷极值Table 3 Extreme loads value of main landing gear during turning
3.2.2 转弯载荷分析
(1)几点假设
飞机在地面转弯是一种圆周运动,受多种因素影响,为简化分析过程,对飞机转弯运动作以下假设:
①飞机作匀速转弯,起落架无侧滑;
②将飞机作为刚体进行分析,忽略飞机弹性变形、起落架缓冲器内部运动;
③忽略道面不平度和侧风影响;
④忽略飞机俯仰运动;
⑤地面转弯均为低速运动,忽略飞机升力影响。
(2)转弯运动平衡方程
根据实测结果给出多支柱起落架转弯时受力图(图7)。图7 为俯视图,未标注出垂向载荷,仅用字母表示。飞机要完成地面转弯,需满足2 个条件:足够的向心力及足够的转向力矩。
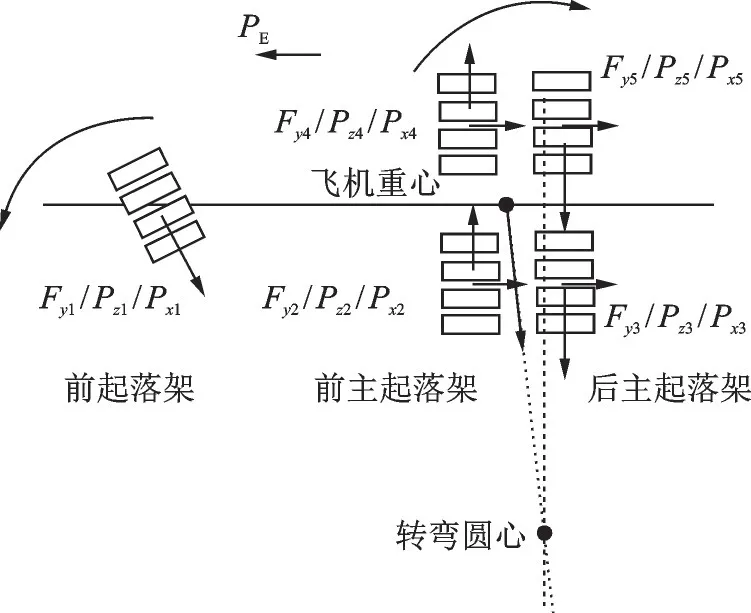
图7 多支柱起落架转弯载荷示意图Fig.7 Sketch of loads of multi-strut landing gears during turning
根据假设及受力分析,地面转弯飞机受力平衡及运动关系,即侧向载荷、偏航力矩及滚转力矩关系式分别为
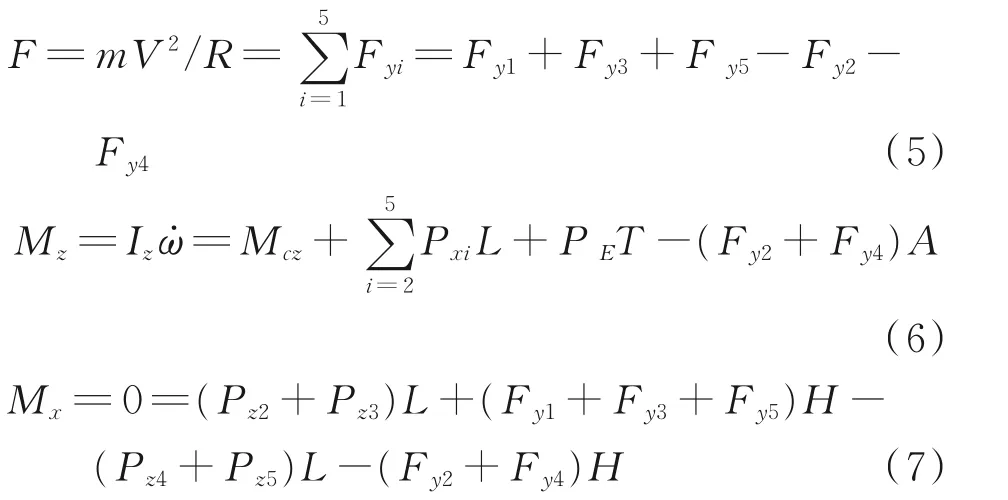
式中:m 为飞机质量,V 为转弯速度,R 为转弯半径,Iz为飞机转动当量惯性矩,ω 为转向速度,Mcz为操纵力矩,L 为主起落架与重心之间的侧向距离,T为发动机推力线到重心侧向距离,A 为前主起落架与重心之间的航向距离,H 为轮胎接地点到飞机重心的垂向距离。
垂向载荷、航向载荷及俯仰力矩依据假设与转弯运动关系不大,本文未列出。
(3)载荷分析
式(5)为飞机转弯圆周运动向心力公式,结合图7 可知,向心力来源于起落架与地面之间的侧向摩擦力。对于三支柱起落架,无Fy2及Fy4;而对于多支柱起落架,由于Fy2及Fy4的存在,要满足飞机转弯的向心力要求,只有增大其他支柱的侧向载荷。实测结果表明,后主起落架侧向载荷远大于前主起落架,正是为满足向心力需求而产生的必然结果。在统计的156 次转弯中,后主起落架侧向载荷平均是前主起落架侧向载荷的1.7 倍,最大可达到6 倍。
式(6)为转弯时转向力矩公式。飞机转弯时,首先要使前轮偏转一定的角度,偏转角增大到某一数值,将保持不变,飞机绕某一瞬时中心作圆周运动[7],该偏角决定了飞机的转弯半径。前轮偏转必须有足够的转向力矩,不同的转弯方式,转向力矩来源亦不同。操纵前轮转弯,由飞行员提供操纵力矩;不对称推力转弯,由发动机推力差形成的力矩提供;不对称刹车转弯,则由刹车载荷之差引起的力矩提供。
由式(5)可知,对于三支柱起落架,无Fy2及Fy4,因此所需的转向力矩只需满足前轮偏转需求即可。而对多支柱起落架,由于无Fy2及Fy4的存在,引起了反向力矩,故除满足前轮偏转需求外,在整个转弯过程中,还必须平衡该反向力矩,这正是多支柱起落架在地面转弯难度增大的原因。该反向力矩的大小与前主起落架侧向载荷量值及前主起落架与重心之间的距离有关。而侧向载荷大小又与转弯速度及转弯半径等有关。前主起落架与重心之间的距离由结构设计决定,从提高转弯机动性的角度看,前主起落架应尽量靠近重心。
根据式(5)分析形成无Fy2及Fy4的原因。大型飞机多支柱起落架完成地面转弯运动,除了绕某一中心的圆周运动外,还必须绕重心转动。由于前、后主起落架分别位于重心前、后位置,形成了不同方向的转动,最终形成了不同方向的侧向载荷。
侧向载荷随转弯角度(转弯半径减小)及转弯速度的增大急剧增大(图8),而前主起落架急剧增大的侧向载荷不利于飞机转向,为了达到转弯的目的,必须通过不断挤压轮胎、增大前主起落架变形的方式,克服不利的侧向力,这直接影响轮胎及起落架的使用寿命。此外,前、后主起落架不同方向的侧向力对机身形成了较大的扭矩,转弯方向不同,扭矩方向随之改变。因此,转弯造成了机身不利的疲劳受载,这是常规三支柱起落架没有的新载荷情况,在静力试验及机身设计时应予以考虑。故在结构设计时应当减小前主起落架侧向载荷以提高飞机地面转弯的机动性,并减小机身疲劳受载。在国外大型飞机多支柱起落架设计中,采取前主起落架转向(如An-124、An-225),或在转弯时抬起前主起落架的方式,以改变前主起落架侧向载荷方向或直接消除前主起落架引起的不利侧向载荷。另一方面,为减小转弯时机身承受的扭矩,前、后主起落架之间的距离不宜过大。
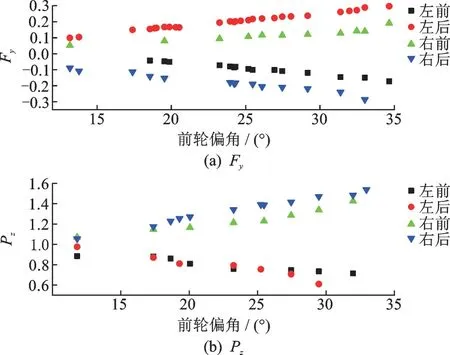
图8 转弯载荷与转弯角度关系曲线Fig.8 Curve of relationship between turning load and angle
式(7)为飞机滚转力矩平衡表达式。飞机在直线滑行过程中,起落架受到的侧向载荷很小,飞机两侧主起落架受到的垂向载荷大致相当,在垂直平面保持滚转力矩的平衡。在转弯过程中,由于侧向力的增加,其合力方向指向转弯圆心,相对飞机重心,增加了外翻的滚转力矩。为了保持力矩平衡,外侧主起落架垂向载荷将增大,内侧主起落架垂向载荷将减小。对多支柱起落架,虽然前主起落架侧向力指向转弯圆心反方向,但侧向总载荷指向转弯圆心,即Fy1+Fy3+Fy5-Fy2-Fy4指向转弯圆心。故侧向力对垂向载荷大小变化的影响与三支柱是相同的。内、外侧起落架垂向载荷变化的幅度与转弯速度、半径等参数有关,文献[17]给出了转弯时三支柱起落架垂向载荷经验估算公式为

式(8)中各符号含义,可参考文献[17],外侧起落架取正号,载荷增加,内侧起落架取负号,载荷减小。当内侧起落架垂向载荷减小到0 时,就达到飞机翻倒临界条件。根据上述公式,进行相应的折算后,利用实测数据进行验证,结果是比较吻合的。由此可见,转弯时外侧后主起落架将承受更大的垂向与侧向组合载荷,是后主起落架严重的受载情况之一。
多支柱起落架除满足上述转弯载荷规律外,由于前、后主起落架不同方向的侧向载荷,对前、后支柱垂向载荷变化量的影响亦不同。对外侧起落架,后主起落架垂向载荷增大的幅度大于前主起落架;对内侧起落架,后主起落架垂向载荷减小的幅度大于前主起落架。因此转弯运动增大了前、后主起落架垂向载荷的不均匀性。与稳定滑行状态相比,转弯时,前、后主起落架垂向载荷的差异最大可增至10%左右。
4 结 论
(1)伊尔76 飞机着陆过程前、后主起落架承担的载荷基本相当,表明该机起落架载荷分配合理,成功将着陆载荷分散到了两组不同的支柱上。
(2)与常规小飞机三支柱起落架相比,多支柱起落架起转载荷较大,回弹载荷较小,起转载荷平均为回弹载荷的2.7 倍。
(3)多支柱起落架转弯载荷与三支柱起落架有很大不同,前主起落架侧向载荷指向转弯圆心反方向,形成阻碍飞机转弯的力矩,后主起落架与前起落架侧向载荷提供转弯向心力,后主起落架侧向载荷平均为前起落架的1.7 倍,最大可达6 倍;前、后主起落架侧向载荷构成对机身不利扭矩,是多支柱起落架新的载荷情况。
(4)转弯是后主起落架垂向及侧向组合受载的严重工况,增大了前、后主起落架垂向载荷的不均匀性,与稳定滑行相比,前、后主起落架垂向载荷差异最大可增大10%左右。
(5)为增大多支柱起落架地面转弯的机动性及受载合理性,后主起落架应着重转弯载荷分析,前主起落架应着力于降低侧向载荷。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
新世纪智能(高一语文)(2021年3期)2021-07-16
中原商报·科教研究(2021年6期)2021-05-13
百科探秘·航空航天(2020年8期)2020-07-29
民用飞机设计与研究(2020年1期)2020-05-21
军民两用技术与产品(2019年12期)2020-01-19
民用飞机设计与研究(2019年4期)2019-05-21
东坡赤壁诗词(2018年6期)2018-12-22
北京航空航天大学学报(2017年2期)2017-11-24
小学阅读指南·低年级版(2016年8期)2016-05-14