
基于粗糙集和神经网络的无人机侦察效能评估*
2021-05-06 06:12甘旭升涂从良孟祥伟
火力与指挥控制 2021年3期
何 媛,甘旭升,涂从良,孟祥伟
(1.西京学院,西安 7101231;2.空军工程大学空管领航学院,西安 710051)
0 引言
信息收集是现代战争的关键环节。尽快确定对方的兵力、装备、目标的准确位置,已经成为影响战争的因素之一。无人机较强的侦察、机动能力以及较高的成本效益使其受到各国追捧[1-3]。如何在不同环境下正确评估无人机的侦察性能,对于充分发挥无人机的战斗力具有重要意义。
目前,对于无人机作战效能的研究比较多,而对于无人机侦察效能的研究比较少,国内外均没有系统的方法与准则。无人机的侦察能力会受到多种条件的制约和影响。因此,建立一套真实条件下的侦察效能评估模型,有利于在执行侦察任务之前选择一套较优的侦察方案,从而确保无人机的侦察效果。
当前无人机的效能评估大多是针对作战效能的研究,对于其侦察效能的研究较少。2016 年,徐冠华等人根据时敏目标的不同特点,分析了察打一体无人机在不同任务模式下的作战使用,将无人机的侦察能力与打击能力进行了相关性的分析,并构建了相应的无人机效能评估模型[4]。2018 年,陈侠等人利用粒子群算法来改进支持向量机的侦察无人机的作战效能评估模型,从而可以准确有效地进行无人机作战效能评估研究[5]。2019 年,庞强伟等人优化了K-means聚类算法的评价标准,然后利用改进的离散粒子群算法来求解侦察序列,进而降低任务的时间代价,从而生成一条多目标侦察的任务航迹来提高侦察效果[6]。2018 年,张海峰等在分析无人机侦察载荷性能特点基础上,设计了多种侦察载荷协同使用的方法,并构建了相应的无人机侦察效能评估模型[7]。2017 年,王光辉等人以CCD 摄像机作为机载侦察设备,对无人机在不同导航方式和不同干扰强度情况下,对给定区域的侦察效能进行了评估,并给出了不同导航方式下侦察效能的评估曲线[8]。2015 年,王庆江等人对无人机搭载CCD 摄像机的侦察效能,建立了相应的侦察模型,并改进了无人机光栅式的侦察方式[9]。2014 年,张旺等根据不同侦察设备的侦察特点,分析了影响多载荷协同侦察效能的因素,利用线性加权算法建立了相应的侦察效能模型,最后对两两协同的侦察效能进行了计算和分析,验证了模型的可用性[10]。无人机的侦察效能是多种因素综合作用的结果。而目前学者是从单一的角度来对无人机的侦察效能作出评估,或者是从某一技术角度来改进无人机的侦察效能,缺乏在多种条件综合作用下的效能评估研究。
为解决上述问题,本文提出一种基于粗糙集和改进的BP 神经网络的无人机侦察效能评估模型。由于无人机的侦察效能往往是多种因素共同作用的结果,因此,选用某部无人机近年来的最新案例并咨询专家,得到影响无人机侦察效能的原因属性,利用粗糙集来对原因属性进行约简找出核元素。在找出主要影响因素的同时进一步简化神经网络的结构。将得出的主要因素输入到神经网络,通过对神经网络的不断训练,得到最终的无人机侦察效能评估模型。通过两种方法的结合,解决了神经网络由于输入参数过多引起的泛化能力下降的问题。
1 相关理论
1.1 粗糙集理论
粗糙集是一种用来处理不确定、不完整数据的分析工具,是与概率、模糊理论具有一定的互补性。粗糙集是利用信息表来表征论域中的每个对象。利用这些外部信息来进行知识约简,找出数据内部潜在的规律。相较于其他方法,该方法的最大优势在于不需要任何额外的信息,进而能够避免主观判断带来的失误,使影响无人机侦察效能的因素更加复杂多样化。同时,利用粗糙集能够更好地进行数据分类,从而在有限的数据中找出影响侦察效能的主要因素。
1.2 B P 神经网络
人工神经网络是利用类似于人脑神经的结构来进行信息加工的数学模型。通常是由训练过程和测试过程组成,其具有较强的自学习性和鲁棒性,能够逼近任意的非线性函数。因此,在数据挖掘、模式识别、信号处理等多个领域都得到广泛应用。而BP 神经网络是一种多层的反馈型前向网络,其结构较为简单,并且具有良好的操作性。其主要是通过不断训练来改变连接权值的数值,最终使得输出的结果与期望值之间的误差最小化。由于无人机侦察效能与影响因素之间的关系是非线性的映射关系,因此,利用BP 神经网络能够找出二者之间的相关关系,从而避免人在效能评估中产生的主观影响。同时,BP 神经网络较好的鲁棒性和自学习性能可更快得到所需评估结果。
2 无人机侦察效能评估模型
为了能够更好地对无人机进行侦察效能预先评估,本文提出一套评估模型,主要是由3 部分组成。
1)建立影响无人机侦察效能的指标体系。通过与某无人机部队了解和与专业人员的咨询,对影响侦察效能的因素进行全面的分析,并按照人- 机-环- 管的理论对其进行分类,确定影响无人机侦察效能的相关因素。
2)结合粗糙集理论来对影响因素进行约简,筛选出主要因素。通过约简来简化网络结构,进而提高下一步中神经网络的信息处理能力,提高网络的泛化能力。
3)利用改进的BP 神经网络,构建无人机侦察效能的评估模型。由于BP 神经网络能够以任意精度来拟合任意函数,因此,利用神经网络来寻找侦察效能和各因素之间的非线性关系。但由于传统的神经网络在训练过程中容易陷入局部最优解当中,且收敛速度较慢,容错性差。因此,通过结合遗传算法来对网络中的权值进行优化,缩短训练时间,提高训练精度。
2.1 无人机侦察效能指标体系的建立
无人机侦察效能通常是多种因素共同作用的结果。本文定义:如果无人机能够清晰侦察到所有目标的信息,视为此次侦察效果为良好,记作1;如果只能够侦察到部分目标或者侦察效果模糊,则视此次侦察效果一般,记作0.7;如果无法获取相关的目标信息,则视为侦察效果不佳,记作0.1。通过对无人机侦察效能的分析,得出影响侦察效果的因素大致可以分为以下几类:人员因素、机械因素、环境因素、管理因素。通过记录侦察效果不佳的飞行可以发现:机械因素和环境因素占据了大部分,人员因素次之,管理因素所占比例最小。具体的比例如表1 所示。

表1 影响侦察效果成因比例
分别从人- 机- 环- 管的角度出发,分析统计了在一定时期内飞行实例,选取其中具有代表的飞行作为此次评估的实例,并通过咨询相关的飞行、管制及机务等相关人员对影响因素进一步细化,筛选出其中具有普遍共性的因素构建评估无人机侦察效能的指标体系。
2.2 基于粗糙集指标体系约简
无人机的侦察效能是由多种因素共同作用的结果。但在该系统中每个因素并不是同等重要,甚至有些是冗余的。因此,必须对其进行约简来找寻能够保证分类正确的最小属性集。本文中将侦察效能作为决策属性,而将其影响因素作为条件属性。通过对条件属性的约简来求核。但是要求解论域中所有最小属性集本质上属于N P 问题,求解时间和计算复杂度过高,采用定义法求解难度较大,因此,利用分辨函数和分辨矩阵来对问题进行求解。图1是对影响因素的约简流程。其中S=(U,A,V,f)为整个信息系统,U 是由飞行实例构成的整个论域;A 是对象的属性,即侦察效能的影响因素;V 是影响因素a 的值域;f 是一个映射函数,为每个对象的属性给予属性值;num 为论域中的对象数。
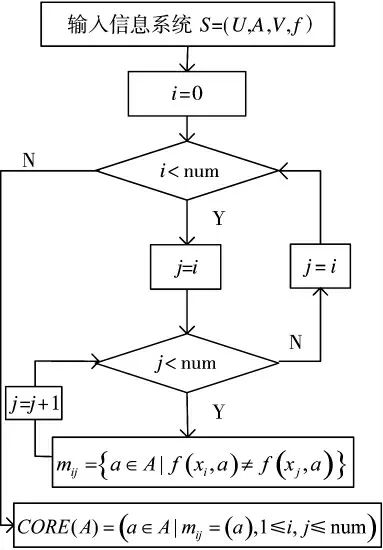
图1 影响因素约简流程
2.3 遗传算法优化的BP 神经网络模型
采用遗传算法优化BP 神经网络的参数的训练过程如下。
基于此,本文主要采用“过程—事件”的分析方法,通过对江苏省A市J、X、S社区征地拆迁过程中三种类型钉子户抗争事件的实践考察,以“策略主义”为分析视角,侧重于探讨地方政府回应钉子户抗争的行动逻辑究竟为何?对地方政府应对抗争行为的内在机制展开深入的理论解释,包括三个问题:一是分析地方政府“软化”钉子户抗争的策略和手段是怎样的?二是主要关注抗争事件的背后,地方政府采用“软策略”这种行动逻辑的内在机制是什么?三是这种“软策略”本质上反映的是何种治理技术?这些构成本文重要的研究动机。
1)神经网络输入节点数的确定:为保证神经网络的泛化能力,将经过粗糙集约简后的主要影响因素的维数作为网络的输入节点数。
2)网络输出参数的确定。将无人机的侦察效能分为1、0.7、0.1 这3 个等级,分别代表获得全部目标信息、获得部分目标信息以及无法获得目标信息。
3)网络的构建。利用一个三层的神经网络来预测无人机的侦察效果。隐含层的节点数一般选择遵从Kolmogorov 定理,即s=2n+1。本文中隐含层节点数的安排主要是根据经验式(1)以及运用试凑法来确定个数。其中,n 为输入层的节点数,m 为输出层的节点数,本文将侦察效果作为输出结果,因此,m=1。


图2 BP 神经网络结构图
具体的网络结构图如图2 所示。其中,p 为输入参数,wij为输入层与隐含层之间的连接权值;vj为隐含层与输出层之间的连接权值;θ2j为隐含层中第j个神经元的阈值;θ3为输出层中神经元的阈值;y 为最后的输出结果,即对侦察效果的预测结果。
4)神经网络的训练。将统计到的40 组飞行数据作为训练样本来训练神经网络,得到相应的侦察效果预测模型。
5)神经网络的精度验证。利用已经得到的侦察效果预测模型对3 组训练样本进行预测研究,进而验证利用神经网络得出的预测结果与实际结果的误差,如果误差过大,则需要对神经网络进行改动至满意的吻合度。
6)结合遗传算法来对神经网络中各层之间连接权值与阈值进行优化。主要分为以下步骤:a)个体的编码:将神经网络中各层之间的连接权值与阈值编作一组实数码,作为一条染色体。b)初始种群的生成:随机生成20 条染色体作为初始种群。c)适应度的计算:将每条染色体对应的连接值和阈值解码到神经网络当中,计算所有个体的平均总误差作为该条染色体的适应度值。即

3 仿真算例
为使预测更能贴合实际情况,跟踪统计了2019年5 月-11 月之间某无人机部侦察飞行情况,并对每次的飞行情况作了细致的分析,同时通过咨询相关专业人员,确定出了与无人机侦察效果有关的17个因素。图3 为影响无人机侦察效果的指标体系。
对于指标体系中的各个要素,记作p1~p17,其中包括定性因素和定量因素。针对定性因素,规定如果对侦察效果有利则属性值为1,反之为0。如机组人员的身体状况良好为1,不佳为0;机组人员操纵水平熟练为1,反之为0。针对定量因素,无法直接判定该因素与侦察结果之间的关系,故用整数来表示实际情况。如无人机的侦察导航方式可以分为GPS,无线电、惯性导航。用1~3 之间的整数来表示侦察飞行时可用的导航方式数。分析每次侦察飞行的实施情况得到下面的决策表,如下页表2 所示。

图3 无人机侦察效果影响因素
利用分辨矩阵和分辨函数对影响无人机侦察效果的因素进行约简和求核,得到影响侦察效果的主要因素是p1,p4,p5,p6,p7,p8,p11,p12,p13,p16,分别代表:机组人员的操作水平,无人机的侦察方式,无人机的导航方式,无人机搭载的传感器,无人机的飞机状况,无人机的数据传输能力,周边的电磁干扰情况,目标区域的天气情况,目标周围的植被情况,各任务组沟通的顺畅性。
针对定量因素,为了确保不同属性值之间的可比性,防止小值的信息被掩盖,因此,需要对其进行归一化处理,本文采用的是最小最大归一化方法来进行处理。由于变化是线性的,因此,可以较好地体现原始意义。具体公式如下:

经过约简后,主要因素为10 个,因此,输入神经元个数为10 个。根据2.3 节中的方法,可以确定隐含层神经元的个数为7 个。而输出结果为此次飞行的侦察效果,因此,输出的神经元个数为1 个。BP神经网络构建完成以后,需要利用统计的数据对网络进行训练以得到最终的模型,本文用前50 组数据来进行训练,用后面3 组数据来进行预测。选取的训练参数为:Sigmoid 函数作为传递函数;Traingdx作为训练函数;各层之间的初始连接权值和阈值均为[0,1]之间的随机数;最大训练次数为500 次,训练误差为10-4。表3 是经过归一化处理以后得到用于训练神经网络的样本数据。

表2 侦察效果影响因素属性表
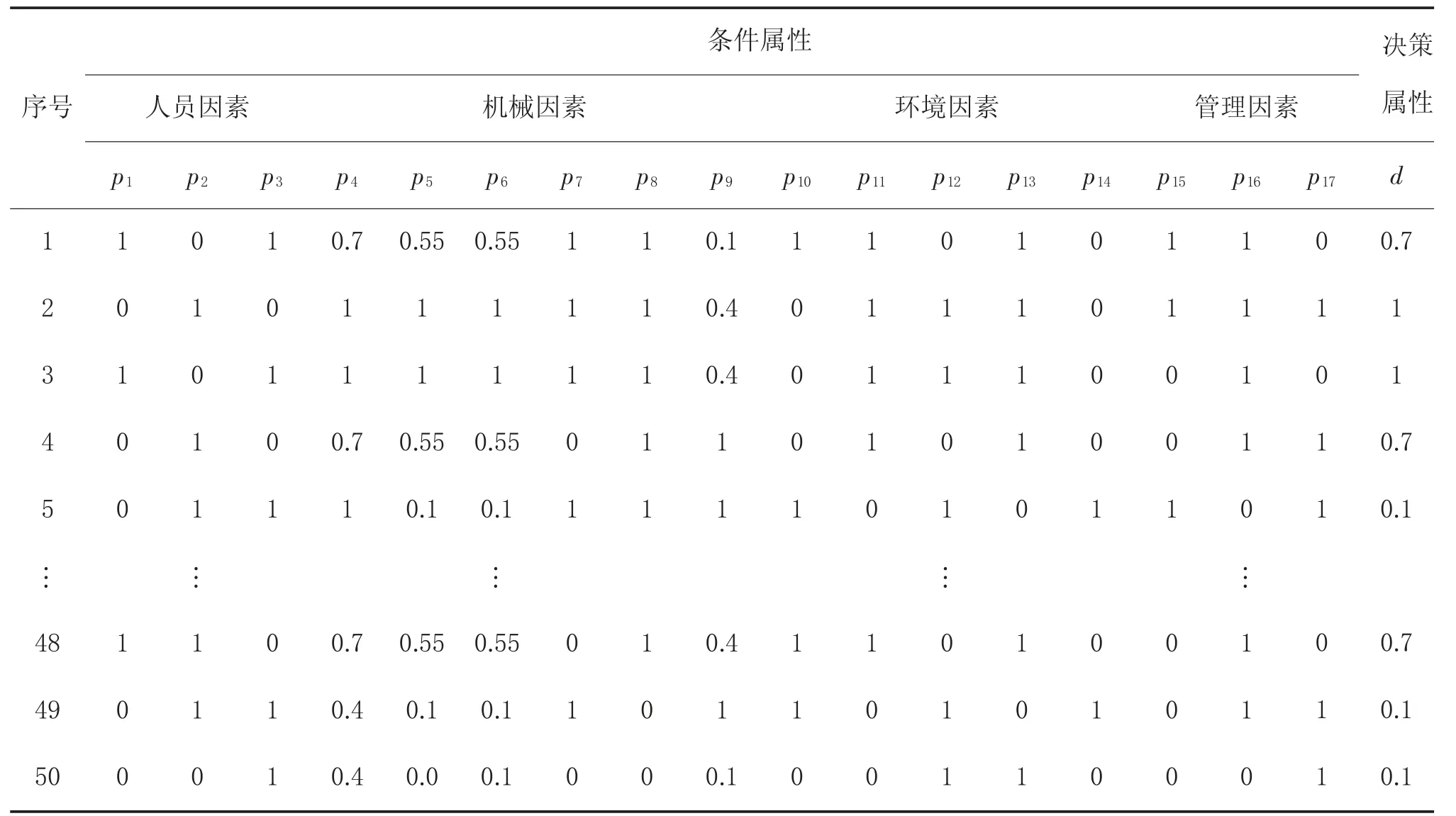
表3 侦察效果训练样本属性决策表
结合上述50 个实例,使用MATLAB 神经网络工具箱来对设计好的神经网络进行训练。通过训练发现:在经过117 次训练以后,BP 神经网络预测值与实际值之间的误差开始满足训练要求,即认为已经获得了较为合理的预测模型。图4 是训练过程中的误差变化曲线。

图4 训练过程误差曲线图

图5 检验结果示意图
将51~53 号实例输入到得出的神经网络进行检验,检验结果如图5 所示,得到预测值与实际值基本重合。而具体的验证数据如表4 所示。可以看出,误差均小于10-3,因此,说明得到的神经网络是有效可行的。

表4 预测结果及其误差
为验证改进BP 神经网络的有效性,利用传统的BP 神经网络来进行训练,结果如图6 所示。通过与图4 比较可知,利用遗传算法改进后的神经网络收敛速度更快。而利用51~53 号实例获得的检验结果如表5 所示。通过比较发现,改进后的网络得出预测值误差在10-3以内,而传统算法在10-2以内,因此,利用改进后网络预测的精度更高。
4 结论
1)提出的基于粗糙集和改进BP 神经网络无人机侦察效能预测模型,能够充分发挥两种方法的优点。该模型能够在众多影响无人机侦察效能的因素中去除冗余因素,找到影响的主要因素。通过实例证明该模型能够较为准确地预测无人机的侦察效果。

图6 传统BP 神经网络训练误差图
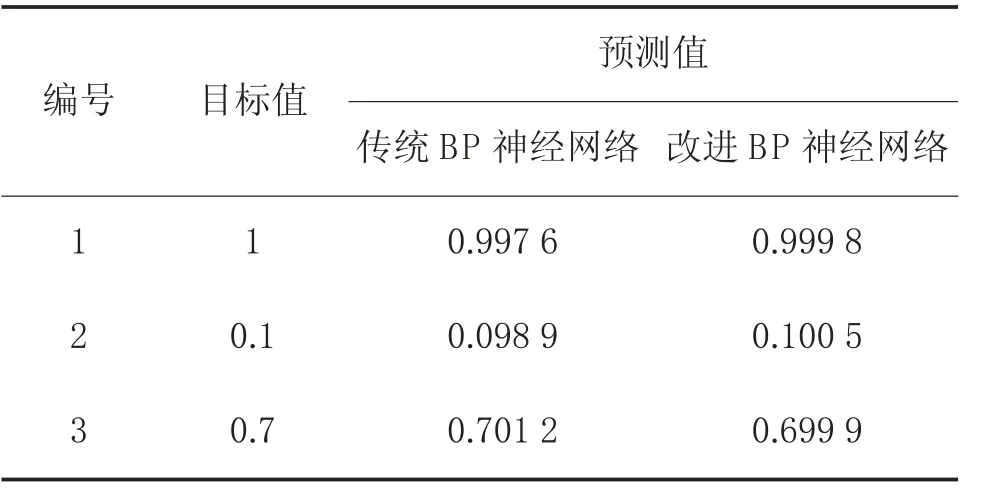
表5 同种方法的检验结果
2)相较于传统神经网络,改进后的方法能够更加快速准确地进行无人机侦察效能的预测评估,能够帮助无人机部队在实战中选择更为合理的侦察方案,具有一定的应用前景。
3)由于无人机应用部队时间较短,可供研究的数据较少,且在调查中会受到个人思维局限性的影响,在下一步的研究中需要寻找更多的数据来研究,同时也要多向专家请教,寻找被忽略的影响因素。
猜你喜欢
聊城大学学报(自然科学版)(2022年5期)2022-10-29
民族文汇(2022年13期)2022-05-07
闽南师范大学学报(自然科学版)(2022年1期)2022-03-28
计算机应用(2022年2期)2022-03-01
计算机应用与软件(2021年11期)2021-11-15
北京航空航天大学学报(2021年9期)2021-11-02
水上消防(2021年3期)2021-08-21
计算机应用(2021年4期)2021-04-20
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
海峡科技与产业(2016年11期)2016-12-26
