
动车组牵引电机轴承健康状态评估与预测
2021-04-28 09:13胡文涛孟建军
兰州交通大学学报 2021年2期
胡文涛,孟建军
(兰州交通大学 机电技术研究所,兰州 730070)
轴承做为牵引电机的关键部件,其可靠性直接影响动车组运行的安全性.我国幅员辽阔,自然条件差异较大,造成动车组的运行环境恶劣,交路长,且长期交变的高频振动和高速运转,也会导致牵引电机轴承失效.因此,对牵引电机进行健康状态的评估和预测是十分必要的[1].目前,已有大量的专家学者对此展开了研究,其中应用最多是基于传统可靠性理论的评估预测方法、基于数据驱动的评估预测方法和基于物理失效的评估评估方法.可靠性理论以机械装备在全生命周期内的失效形式以及失效机理为研究对象,利用数理统计的方法分析挖掘这些故障的演化规律,并通过故障发生的密度函数和概率等指标,来评估预测设备的健康状态,其应用较广,但是对于复杂系统,难以建立较为准确的模型[2].基于数据驱动健康状态评估方法,是通过对设备全生命周期内信息的采集和处理,利用机器学习构建数据输入和输出的映射关系,使用预测模型取代物理模型来实现的.其评估预测精度较高,但是对于数据要求也较高,而且资金投入相对较大[3].基于失效物理的评估方法可在存储条件下进行评估预测,而且对数据要求不高,可利用传感器进行数据采集,尤其对损失积累造成的失效,将数据信息和模型结合,其评估预测精度更高,但是资金投入也更高,而且应用范围较窄[4].
基于此,综合考虑评估精度、应用范围和资金投入,论文选取长短期记忆网络(LSTM)对动车组牵引电机轴承的健康状态进行评估与预测.通过采集轴承的振动信号,提取和选择退化特征,利用特征融合算法对特征进行融合,计算最小量化误差,并构建HI曲线.最后采用长短期记忆网络对动车组牵引电机轴承的健康状态进行评估与预测,验证评估方法的合理性和准确性.
1 长短期记忆网络
1.1 长短期记忆网络结构特征
长短期记忆网络(Long-Short Term Memory,LSTM)最早是由Hochreiter提出的,一经提出,便有很多专家学者对其进行了研究改进,目前已在许多领域得到广泛应用.LSTM网络实质上是一种改进的递归神经网络(Recurrent Neural Networks,RNN ),其结构与RNN相似,由输入层、隐藏层和输出层三层网络构成,具有一连串的链状重复神经网络模块,所不同的是它有四层神经网络,且以特殊的方式相互作用,而不是单个神经层,可以有效克服RNN出现梯度消亡的现象[5].
LSTM网络中添加了三个门限结构,分别是遗忘门、输入门和输出门,重复模块中包含有四个相互作用的激活函数,一个tanh函数和三个sigmoid函数,不仅解决了退化时间的关联性,还考虑较远信息之间依赖性的问题,其一般结构如图1所示.其中,每条线都表示一个完整的向量,从一个节点的输出到其他节点的输入,线条合并表示串联,线条分叉表示复制内容并输出到不同的节点,σ和tanh表示门限激活函数,x表示某个时刻的输入数据,h表示某个时刻的输出,⊗和⊕表示乘法操作和向量加法,代表允许传递的信息量[6].
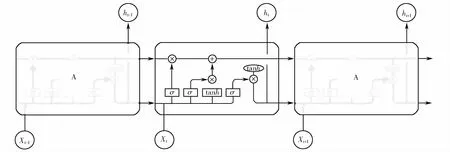
图1 LSTM网络结构图Fig.1 Structure of the LSTM network
1.2 长短期记忆网络作用原理
LSTM网络信息传递分为正向传递和反向传递,对于正向传递,输入门控制何时让激活函数传入存储单元,而输出门控制何时让激活函数传出存储单元.相应的,对于反向传递,输出门控制何时让错误流入存储单元,输入门控制何时让错误流出存储单元.其传递可分为三个步骤,下面进行详细介绍.
第一步:遗忘门限层,控制哪些信息从单元状态中抛弃,其计算公式如式(1)所示[7].
ft=σ(Wf·[ht-1,xt]+bf),
(1)
式中,ft表示t时刻的值,σ表示激活函数,Wf是遗忘门连接权重矩阵,ht-1是隐含层上一个时间节点的输出,bf是遗忘门的偏移值,xt是t时刻的输入层的输出.
第二步:控制单元状态中哪些信息需要储存,具体过程为生成临时新状态和更新旧状态,生成临时新状态的计算公如式(2)和式(3)所示[8].
it=σ(Wi·[ht-1,xt]+bi);
(2)
(3)


(4)
第三步:控制输出,首先通过sigmoid激活函数,控制输出信息,再将单元状态输入到tanh激活函数,将值转化到-1到1之间,再乘以sigmoid门限值,即可得到输出.具体计算公式如式(5)和式(6)所示[9].
ot=σ(Wo⎣ht-1,xt」+bo);
(5)
ht=ot*tanh(Ct).
(6)
式中,ot表示输出值,Wo表示输出门连接权重矩阵,bo表示输出门的偏移值.
2 构建健康指数曲线
2.1 数据采集
动车组在运行过程中主要受横向振动和垂向振动,横向振动主要影响动车组的平稳性,垂向振动主要影响乘客的舒适性,所以,我们主要从振动特性入手,对动车组牵引电机轴承进行数据的采集和分析,用加速度来表示.而采集的方法是通过安装在牵引电机上加速度传感器来体现,采样频率为1 800 Hz,采样间隔为5 min,共采集不同工况条件下的500组数据,每组数据1 200个点,以此作为牵引电机轴承健康状态评估和预测的依据.
2.2 退化特征的提取
退化特征提取是进行健康状态评估和预测的首要任务,直接影响到评估预测的准确性.由于动车组牵引电机轴承运行环境恶劣,运行时间长,载荷重,各个部件之间振动信号叠加,干扰因素较多,耦合现象严重;如果仅凭某一个退化特征是不能够完全反映动车组牵引电机轴承的健康状态,而且单一的特征很容易受动车组运行工况和环境影响的,也不能完全反映牵引电机轴承的运行状态,因此,需要从振动信号的时域、频域以及时频域中提取退化特征,以便更全面地反应牵引电机轴承的健康状态.
2.3 退化特征选择
在动车组牵引电机轴承的全生命周期内,不同的特征对退化的敏感性和相关性影响不同.健康状态评估时,需要退化特征能够识别出不同健康状态,而健康状态预测时需要退化特征能够反映出动车组牵引电机轴承的退化过程,所以需要选择一些敏感的退化特征.而常用退化特征的选择指标主要有单调性、相关性和鲁棒性等,下面就这三项指标,给出详细的定义,并以此进行特征的选取.
1) 单调性指标
单调性指标用来表示设备性能退化的一致性,取值范围为[0,1],单调性的值越大,越接近于1,表明该特征的单调性趋势越强.单调性指标具体定义如式(7)所示[10].
(7)

2) 相关性指标
相关性指标是用来反映退化程度和退化时间之间的相关程度,相关性指标值越大,表明相关程度越高,对于退化过程的描述也更加清楚完整,具体定义如式(8)所示[11].
Corr(X)=
(8)
式中,n为样本数,X=(x1,x2,…,xn)为退化时间序列,T=(t1,t2,…,tN)为采样时间序列.
3) 鲁棒性指标
鲁棒性通常是用来表示退化特征的稳定性,退化特征的时间序列越平滑,鲁棒性越好,稳定性越好,在进行健康状态评估与预测时不确性越小,其取值范围[0,1],具体定义如式(9)所示[12].
(9)

为了准确体现这三项指标,现将这三项指标作为约束条件,建立线性组合方程,将问题转化为求解多目标优化的问题,通过对每项指标赋一个权值,以此来选取敏感性较大的退化特征.建立的线性组合方程如式(10)所示[13].
(10)
式中,W为多目标优化函数,ωi=(1,2,3)为各个退化特征评价指标的权重.
在牵引电机退化过程建模时,查阅相关参考文献[14]并结合现场工作经验,各个退化特征评价指标的权重分别为ω1=0.5,ω2=0.2,ω3=0.3.根据式(10)可计算出各个退化特征的综合性评价指标,最终从时域、频域和时频域内选取的退化特征有最大值、方差、频率方差、平方根比率、平均幅值、标准差、平方根频率、方根幅值、中心频率、频率标准差、均方根、均方频率、均方根植和能量特征共14个退化特征[15].
2.4 退化特征融合
采用多目标优化函数对敏感退化特征进行选取之后,还需要运用特征融合算法对选取的这些特征进行融合,生成一条能够全面反映动车组牵引电机轴承退化状态的健康指数(Health Indicator,HI)曲线.深度学习是智能机器数据分析研究中的一个新领域,来源于人工神经网络,每次学习只训练一层,将其训练结果作为高一层的输入,并能使用监督学习去调整所有层,对于特征的融合和降维非常合适.因此,本文借助深度学习网络对所选取的退化敏感特征进行特征融合,并计算最小量化误差(Minimum Quantization Error,MQE)[16].具体步骤如下:
1) 数据预处理,为了简化计算,对上一节中选取的退化特征进行归一化处理,使各个退化特征变为纯量.
2) 定义算法公式,对于一个特征向量X=[x1,x2,…,xn]T,首先计算X与拓扑层神经元之间的欧式距离,然后以距离最小神经元为取胜神经元C,计算公式如式(11)所示[17].
(11)
式中,wij为输入层第i神经元与拓扑层第j个神经元之间的权值向量[11].
3) 数据迭代训练,将前300组数据作为训练集,剩下的数据作为测试集,因为特征维数为14,所以输入层神经元为14,输出层维数为5×5,学习速率为0.8,训练次数为100,以此来进行训练.
4) 计算最小量化误差MQE,MQE是输入特征向量与取胜单元C之间的距离,计算公式如式(11)所示[18].
MQE=‖X-wc‖.
(12)
式中,wc为获胜单元权值向量[13].
通过以上计算可以得出MQE,但是,这样得到的MQE会存在大量的毛刺和干扰因素,直接作为HI进行牵引电机轴承健康状态的评估和预测,会影响预测的准确性,所以多MQE进行db5小波分解,以低维趋势项作为HI曲线,分解结果如图2所示.有图可知,牵引电机轴承的退化可分为两个阶段,在420×5 min之前退化缓慢,之后快速退化,直到失效[14].
3 牵引电机轴承健康状态评估与预测
3.1 基于LSTM网络的牵引电机轴承健康状态评估与预测
由2.4节可知,动车组牵引电机轴承的退化分为两个过程,在缓慢退化阶段,牵引电机轴承的可靠性较高,对动车组的安全性影响不大;但是在加速退化阶段,牵引电机轴承可靠性降低,会危及行车安全.因此,论文以前420组数据对LSTM网络进行训练,对后80组HI值的变化趋势进行预测.
在使用LSTM网络进行健康状态评估与预测时,首先要对网络参数进行设置,具体参数如下:输入层节点为5,输出层节点为1,学习效率为0.8,误差为0.05,迭代次数为200,记忆单元数为5,损失函数选择平方损失函数.并设置牵引电机轴承失效的阈值为2,对快速退化阶段HI值的变化进行预测,最终预测结果如图3所示.
由图3可看出,随着服役时间的推移,LSTM网络的预测值虽然可以跟踪真实值,但是误差变得越来越大,预测失效时间为468×5 min,而实际失效时间为461×5 min,滞后了7×5 min.出现失效时间滞后的主要原因是误差累计造成的,但是通过HI值,可以反映牵引电机轴承的健康状态,也可为零件的预测性维护提供理论依据.

图2 MQE和HI曲线Fig.2 MQE and HI curve

图3 LSTM网络预测结果Fig.3 Forecast results of the LSTM network
3.2 基于ANN的牵引电机轴承健康状态评估与预测
为了验证LSTM网络预测的性能,同时采用ANN对牵引电机轴承的健康状态进行评估和预测,并对预测结果进行比较分析.同样以前420组数据ANN网络进行训练,对后80组HI值的变化趋势进行预测,最终预测结果如图4所示.
由图4可看出,使用ANN模型进行预测时,随着时间的增加,预测值跟实际值之间的偏离程度越来越大,预测失效时间为473×5 min,而实际失效时间为461×5 min,滞后了12×5 min.
对两种方法的预测结果进行对比分析,可发现,LSTM网络的预测精度比ANN网络预测精度高,预测的失效点也更加接近于实际值,因此,可得出,LSTM网络的预测性能更优,更适合动车组牵引电机轴承健康状态的预测和评估.
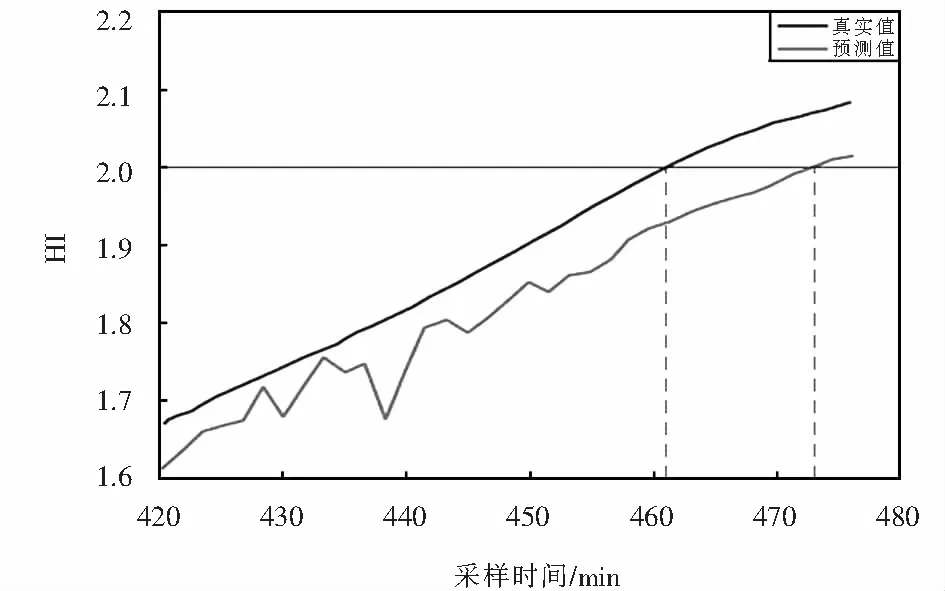
图4 ANN预测结果Fig.4 Forecast results of ANN
4 结语
本文提出了一种基于LSTM网络的健康状态评估预测方法,已动车组牵引电机轴承为研究对象,可以得出以下结论:
1) 基于LSTM网络的健康状态评估预测方法综合考虑了评估精度、可行性和资金投入,使得该方法具有更加广泛的适用性和经济性.
2) 通过深度学习网络对轴承的退化特征进行了融合和降噪,提高了评估预测的效率和精确性.
3) 将人工神经网络的评估预测结果和LSTM的结果进行了比较分析,二者基本趋势相同,但是LSTM的评估预测结果更加接近于真实值,说明LSTM网络的预测性能更优,更可靠,具有良好的应用价值.
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
防爆电机(2021年5期)2021-11-04
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
海峡姐妹(2020年2期)2020-03-03
伙伴(2020年1期)2020-02-14
校园英语·中旬(2017年16期)2018-01-27
山东工业技术(2016年15期)2016-12-01
