
基于预测自适应的永磁同步电机无传感器控制
2021-04-27 07:13程亮戴天董子健
河北大学学报(自然科学版) 2021年2期
程亮,戴天,董子健
(1.邯郸学院 机电学院,河北 邯郸 056005;2.华北电力大学 控制与计算机工程学院,河北 保定 071003)
永磁同步电机具有功率密度高、调速范围宽、结构简单等特点,广泛应用在风力发电、机器人、电动汽车等领域[1-2].在永磁同步电机矢量控制中需要位置传感器获取电机转子位置角和电角速度信息实现转速精确控制,但湿度、温度、粉尘浓度等因素会严重影响位置传感器的稳定性和信号的可靠性[3].传统比例积分(PI)控制器在永磁同步电机受到外部扰动和系统不确定性情况下,其控制效果会变差[4].大量文献对永磁同步电机无位置传感器控制进行了深入研究.王要强等[5]提出一种以边界层可变的双曲正切函数为全阶滑模观测器,且将滑模速度控制器替代传统参数恒定的PI控制器,有效改善了永磁同步电机动态性能.高钦和等[6]为克服低速运行时定子反电势过低不易观测的问题,提出应用锁相环技术对永磁同步电机转子的位置信息进行提取. Kim等[7]为削弱反电动势中的高频抖振,提出应用Sigmoid饱和函数代替符号函数估计永磁同步电机转子反电动势.张震等[8]提出一种复合检测方法,将扩展卡尔曼滤波算法与高频信号注入法相结合对永磁同步电机转子的位置信息进行实时估计.周贝贝等[9]为减小系统的抖振,提出基于幂次趋近律的滑模观测器进行反电动势估算.申永鹏等[10]提出基于扩展滑模观测器的永磁同步电动电机转子速度信息提取.为克服电机在系统扰动下的鲁棒性差、运行不稳定的问题,罗德荣等[11]提出一种实时切换参考坐标系的动态滑模控制策略.针对电机直接转矩控制转矩和定子磁链脉动大、逆变器开关频率不固定问题,苏丹丹等[12]提出改进模型预测直接转矩控制策略.针对传统永磁同步电机无传感器控制出现的问题,同时综合现有文献资料,本文采用在线梯度下降法设计可调整参数的二阶线性扩张状态观测器,用于永磁同步电机无传感器控制.在线梯度下降法能够在电机负载扰动或转速突变情况下进行实时参数整定,以保证准确快速地对永磁同步电机转速实时估计.同时将预测自适应滑模控制系统应用于转速环节,通过预测自适应估计扰动变化量进行实时电流补偿.
1 永磁同步电机数学模型建立
α、β坐标系下定子电流方程为
(1)
式中,iα与iβ、uα与uβ、eα与eβ、Lα与Lβ分别为α、β坐标系下电流分量、电压分量、反电动势分量和电感分量;Rs为定子电阻[13].
式(1)反电动势eα、eβ可表示为
(2)
式中,ψf为永磁磁链;ωe为转子电角速度;θe为转子位置角.
由式(2)可知,反电动势包含永磁同步电机转子位置角θe和电角速度ωe参数信息.
2 带参数整定的二阶线性扩张状态观测器设计
2.1 二阶线性扩张状态观测器设计

(3)
将函数φ(ωe,θe)扩张为1个新的变量x2,即
x2=φ(ωe,θe).
(4)

(5)
(6)
式(6)离散化状态空间方程为
(7)
式中,z1(k)、z2(k)为永磁同步电机变量x1(t)、x2(t)的观测值;β01、β02为二阶线性扩张状态观测器参数;h为积分步长.
由于β01、β02影响观测器状态扰动和跟踪的估计,参数β01、β02设定合适值可使误差无限小[14].
2.2 基于反正切函数的转子位置与速度估计
由式(6)可求得永磁同步电机自抗扰二阶线性扩张状态观测器[15]
(8)

(9)
则
(10)

(11)
3 基于预测自适应的滑模速度控制器设计
定义永磁同步电机状态变量
(12)
式中,ωref为永磁同步电机给定转子电角速度.
由式(12)可得状态方程[16]
(13)
式中,C为常数项.
定义速度滑模面函数
s=kx3+x4,k>0
(14)

(15)
将式(14)代入式(15)得
(16)
kx4-Du=-εsgn(s)-qs.
(17)
由式(17)可得q轴参考电流
(18)
在实际运行中,永磁同步电机的外部扰动和参数摄动等因素会降低电机鲁棒性,传统滑模速度控制器无法解决.基于上述问题,假定TL=TL0+ΔTL,ψf=ψf0+Δψf,TL0、ψf0为电机设计参数,ΔTL、Δψf为电机扰动量[17].
由式(18)可得不确定参数式
(19)
式中,|ΔTL|≤σ,|Δψf|≤δ,σ、δ分别为负载和磁链扰动量上界,则基于预测自适应的速度滑模函数和q轴参考电流的速度滑模面为
(20)
由式(20)可得修正后
(21)

4 仿真与结果分析
为验证本文控制策略的有效性和优越性,利用Simulink仿真工具构建如图1所示控制系统,仿真条件如表1所示,仿真模型使用的电机参数如表2所示.

图1 系统仿真模型Fig.1 System simulation model

表1 仿真条件

表2 仿真电机参数
4.1 空载起动分析
永磁同步电机空载起动,设置仿真时间为0.05 s,给定转速为600 r/min,0时刻电机空载起动,得到电机空载转速曲线和电磁转矩曲线,如图2和图3所示.
由图2可知,空载时带参数整定二阶线性扩张状态观测器经参数实时整定后能够对转速准确快速估计,预测自适应滑模控制策略可使电机0.005 s稳定在给定转速,且在转速调节过程中无超调现象;由图3可知,预测自适应滑模控制策略使得空载起动下永磁同步电机电磁转矩0.007 s达到稳态,有效减少了电磁转矩频繁抖振,而且稳态下电磁转矩准确稳定在0.

图2 电机空载转速曲线Fig.2 Motor no-load speed curve

图3 电机空载电磁转矩曲线Fig.3 Motor no-load electromagnetic torque curve
4.2 抗扰性能分析
设置仿真时间为0.2 s,初始转速为0,初始负载转矩为1 N·m,0.08 s时转速由600 r/min上升到1 000 r/min,0.15 s时负载转矩由1 N·m上升至4 N·m.得到新型永磁同步电机无传感器控制策略下的电机负载转速曲线和电磁转矩曲线,如图4和图5所示.
由图4可知,负载时带参数整定二阶线性扩张状态观测器经参数实时整定后能够对转速准确快速估计,且在外部负载扰动下无明显抖振现象,预测自适应滑模控制策略使永磁同步电机大约在0.01 s由初始转速600 r/min达到给定转速1 000 r/min,响应速度快且在转速调节过程中无超调现象,0.15 s时负载转矩突然增加对电机转速几乎无影响,体现预测自适应滑模控制策略具有良好的鲁棒性;由图5可知,在0.15 s时电机负载转矩突然增加情况下预测自适应滑模控制策略使电机转矩响应速度提高,有效避免调整阶段的周期性抖振且稳态阶段电磁转矩抖动幅值减小.
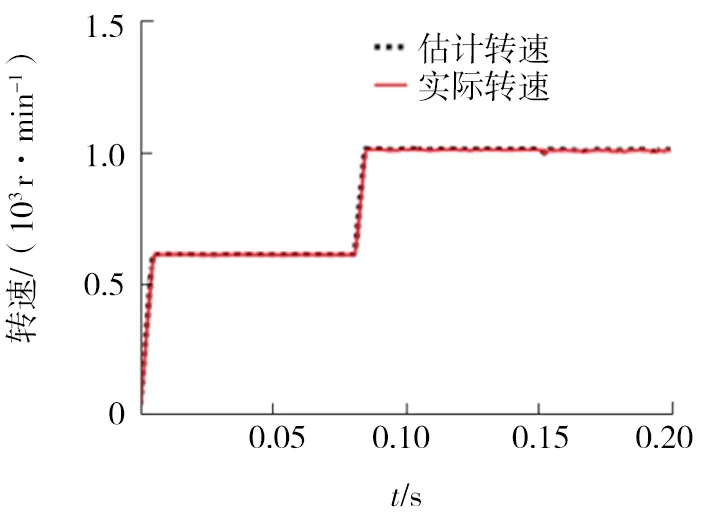
图4 电机负载转速曲线Fig.4 Motor load speed curve

图5 电机负载电磁转矩曲线Fig.5 Motor load electromagnetic torque curve
5 结论
针对传统永磁同步电机无传感器控制动态性能差和转速信号观测精度低的问题,本文设计了新型永磁同步电机无传感器控制方法.采用在线梯度下降法设计二阶线性扩张状态观测器,该二阶线性扩张状态观测器能够在永磁同步电机负载扰动或转速突变情况下准确快速对电机转速实时估计,同时将预测自适应滑模控制系统应用于转速环节.为验证本文提出方法的有效性和优越性,利用Simulink仿真工具建立新型永磁同步电机无传感器控制方法仿真平台,通过仿真分析电机空载起动、变速运行和突加载荷3种情况.仿真结果表明带参数整定二阶线性扩张状态观测器经参数实时整定后能够对转速信号准确快速估计且抗干扰能力强;预测自适应滑模控制策略有效缩短电机速度响应时间,显著削弱电机转速、电磁转矩的抖振,表现出良好的动态性和鲁棒性.
猜你喜欢
防爆电机(2022年4期)2022-08-17
火力与指挥控制(2022年6期)2022-07-25
防爆电机(2022年3期)2022-06-17
中等数学(2021年9期)2021-11-22
计算机仿真(2021年3期)2021-11-17
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09
北京航空航天大学学报(2020年10期)2020-11-14
航空发动机(2020年3期)2020-07-24
数学学习与研究(2017年20期)2018-01-02
