车联网中的协同通信平均传输时间计算*
2021-04-24 06:24赵义飞张月霞
电讯技术 2021年4期
赵义飞,张月霞
(北京信息科技大学 a.信息与通信工程学院;b.现代测控技术教育部重点实验室,北京 100101)
0 引 言
随着5G移动通信技术时代的到来,超高可靠低时延通信(Ultra Reliable Low Latency Communications,URLLC)场景的大规模应用为车联网(Internet of Vehicles,IoV)的快速发展提供了机遇。在IoV中,基于LTE技术的车联网(LTE-Vehicle,LTE-V)标准是基于国内4G基础网络部署所建立的点对点通信标准,但是整体标准尚未制定完成,产业相对不成熟;而专用短程通信技术(Dedicated Short-Range Communications,DSRC)是一种较为完备的5G无线通信技术,其数据传输方式以车对车(Vehicle-to-Vehicle,V2V)和车对路(Vehicle-to-Infrastructure,V2I)为主。V2V通信具有能耗小、传输功率低、传输范围广的性质,但是它的传输速率较低,稳定性较差;而V2I 通信具有传输速率高、传输较为稳定的性质,但是它的传输受限于路侧单元(Road Side Unit,RSU)通信范围,并且会因大量的车辆接入导致频谱资源紧张甚至短缺。因此,研究V2V和V2I 协同通信以实现车联网内数据传输效率的提升很有必要。
目前关于IoV通信的研究大致分为以下两类:第一类是针对V2V或者V2I单一通信进行相关链路完善或者技术优化的研究,如:文献[1]针对V2V通信的延时问题,提出一种链路补偿算法,以增强通信实时性和准确性;文献[2]针对V2V通信不稳定的问题,提出一种路由转发加强算法,以降低数据包丢失率;文献[3]针对V2I通信能耗问题,提出一种结合非正交多址接入(Non-Orthogonal Multiple Access,NOMA)技术来研究通信过程中传输功率的分配方案。第二类是针对IoV通信过程中的时延问题进行相关算法的研究,如:文献[4]基于时延最小化提出一种预测型缓存数据分发机制,可以有效降低IoV通信过程中传输节点的传输时延;文献[5]基于IEEE 802.11p和终端设备直连(Device-to-Device,D2D)通信提出一种动态分配资源算法,可以有效降低端到端的时延。综上所述,采用传统的V2V或者V2I中的一种方式进行通信时,可能由于其没有完全覆盖,导致了通信中断,延长了通信的时间。而已有的V2V和V2I协同通信,主要考虑利用同向车道的车辆作为协同节点,避免了由于没有完全覆盖导致的通信中断问题,但是通信的时延仍然比较大。
为了更有效地降低IoV通信时延,本文基于对向车道场景,将V2V、V2I通信进行协同,提出一种新的IoV协同通信下平均传输时间的计算方法。本文通过分析推导目标数据从请求开始到完成的平均传输时间,显著降低了IoV通信的整体消耗时间,提高了传输效率。
1 系统模型
本文研究对向车道场景下V2V、V2I协同通信传输(Cooperative Communication and Transmission,CCT)算法,系统模型如图1所示。
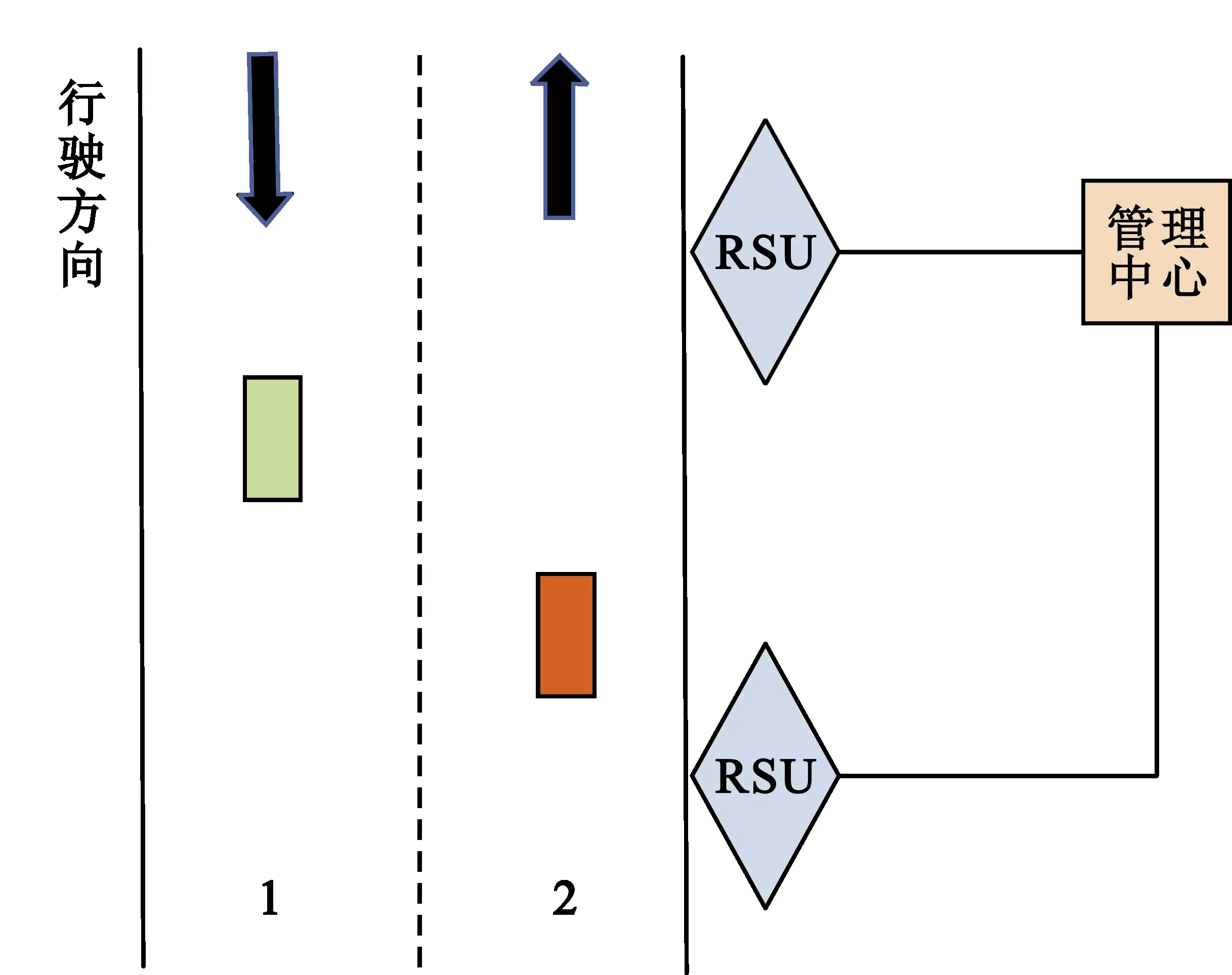
图1 系统模型图
本模型主要包括对向车道、RSU、管理中心等三部分。在对向车道中,1为反向车道、2为正向车道。假设位于同一车道上的行驶车辆速度相同,定义vi(i=1,2)是第i条车道的车速,i是车道序号。因车速不可能为负,故v1≥0,v2≥0。根据文献[6],车辆的速度是一个随机变量,服从正态分布,记作
(1)

RSU为道路附近设施或者基站,具有边缘计算和预缓存功能,它可以缓存车辆的相关信息,便于车辆请求调度。由于并非每个RSU都缓存车辆的信息,故而有一定的缓存概率,记为PR。由于RSU在道路侧的分布有限,不可能全部覆盖,故而将整个道路分为RSU通信范围和RSU无法通信范围,并且相对应的道路长度服从参数为a和b的泊松分布[7]。在RSU通信范围内,行驶车辆优先采用V2I方式进行数据传输,并定义V2I传输速率为r1;在RSU无法通信范围内,行驶车辆采用V2V方式进行数据传输,并定义V2V的传输速率为r2。设定车辆的通信半径为Rv[8]。
管理中心是负责RSU数据缓存、调度的设施。如果车辆进行数据请求时发现RSU没有相应的数据内容,则需要向管理中心提出申请,管理中心再下发数据内容,这个往返调度时间记为T[9]。
2 CCT算法
2.1 CCT算法原理
在行驶过程中,车辆的初始位置是随机的,即位于RSU通信范围内,或者RSU无法通信范围内,则该车辆产生数据请求的时刻也是随机的。并且,车辆完成数据传输的位置与时刻也是随机的。将请求数据的车辆定义为激励车辆I-vehicle(Incentive vehicle),缓存I-vehicle需要数据的车辆为响应车辆 R-vehicle(Responsive vehicle)。
由于车辆的快速移动、位置变化和频繁切换等性质,I-vehicle不能保证每时每刻都在进行有效的数据传输,故而整体传输过程拥有两种状态:一是车辆的纯行驶状态,即I-vehicle在无法与缓存RSU或R-vehicle建立通信链路时,保持行驶等待状态,一直到可以建立通信链路为止;二是交流状态,即I-vehicle在行驶过程中与缓存RSU或R-vehicle进行数据传输,处于相互交流状态[4]。
如图2所示,本文将整体数据传输分为三个阶段:一是初始阶段,即从I-vehicle产生数据请求的时刻开始,到它离开RSU通信范围或 RSU无法通信范围的时刻;二是传输阶段,即I-vehicle从初始阶段结束的时刻开始,到离开最后一个RSU通信范围或 RSU无法通信范围的时刻;三是结束阶段,即从I-vehicle从传输阶段结束的时刻开始,到完成全部数据传输的时刻。
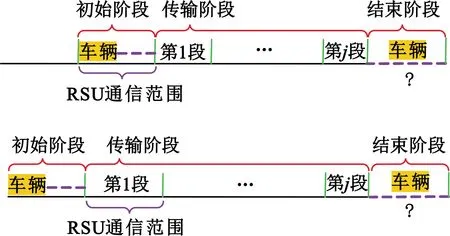
图2 数据传输划分阶段
2.2 传输时间分析
在V2V、V2I协同通信下进行数据传输,缓存RSU或者R-vehicle以一定概率出现,由于数据传输过程中,因外部条件难免会出现传输失败或者重传的情况,所以本文中所出现的RSU缓存概率PR和R-vehicle缓存概率PV是包括此种情况的总体概率。
2.2.1 初始阶段

(1)V2I传输时间
设I-vehicle数据请求开始时刻的起始位置位于RSU覆盖范围之内,与初始RSU通信范围边缘距离为x0,则初始阶段传输时间为
(2)
如果RSU缓存目标数据(概率为PR),则初始阶段传输数据量为
(3)
如果RSU未缓存目标数据(概率为1-PR),则初始阶段传输数据量为
(4)
(2)V2V传输时间
当行驶车辆处在RSU无法通信范围时,为获得自身所需要的目标数据,I-vehicle会向周围车辆进行广播,周期性地发送请求数据包m,从而期望在自身通信半径Rv之内获得R-vehicle的接收反馈kn(n=1,2,…,q)。因为并非所有车辆都恰好缓存目的数据,所以结合统计学和概率学,定义数据包反馈率PV(Packets feedback rate)作为R-vehicle的缓存概率[10],即
(5)
因为车辆位置服从泊松分布,根据文献[11],在I-vehicle通信范围内,车道存在R-vehicle的概率是
PV′=1-e-2RVρPV。
(6)
本文不考虑I-vehicle和对应的R-vehicle出现在同一车道,因为相同车道默认车速相同,所以在两者相连接的有效时间内,会从头到尾保持通信,一直到数据传输完成为止。
设I-vehicle初始时刻的起始位置位于RSU覆盖范围之外,与RSU未通信范围边缘距离为x1,假设I-vehicle在车道2,对应的R-vehicle在对向车道1,则该阶段传输时间为
(7)
该阶段传输数据量为
(8)
2.2.2 传输阶段
(1)V2I传输时间
设I-vehicle在传输阶段的行驶位置位于RSU覆盖范围之内,在该范围内的传输距离为a,则传输时间为
(9)

(10)
(2)V2V传输时间
设I-vehicle在传输阶段的行驶位置位于RSU覆盖范围之外,在该范围内的传输距离为b,则该段传输时间为
(11)
该段传输数据量为
(12)
2.2.3 结束阶段

(1)V2I传输时间
设I-vehicle数据传输完成时刻的结束位置位于RSU覆盖范围之内,与最后一个RSU无法通信范围边缘距离为x2,则该阶段传输时间为
(13)
如果RSU缓存目标数据(概率为PR),则该阶段传输数据量为
(14)
如果RSU未缓存目标数据(概率为1-PR),则该阶段传输数据量为
(15)
(2)V2V传输时间
设I-vehicle数据传输完成时刻的结束位置位于RSU覆盖范围之外,与最后一个RSU通信范围边缘距离为x3,同理,初始阶段传输时间为
(16)
则初始阶段传输数据量为
(17)
2.2.4 整体传输时间
(1)整体传输时间ttotal为
(18)
ttotal的均值为
E[tV2V]+P′·E[t2]+P″·E[t3]。
(19)
其中:
(20)
(21)
(22)
(23)
可得,E[ttotal]的解为


(24)
3 仿真与分析
本文仿真基于IEEE 802.11p的DSRC专用短程通信协议标准。通信源节点设置为目标车辆发出的请求数据,目标节点设置为通信范围内对应RSU或者车辆中缓存的目标数据。本文基于Matlab平台,模拟对向车道场景,对I-vehicle在V2I/V2V协同通信下的数据传输,进行一系列系统仿真,仿真图像中的每一点是仿真10 000次的平均值[4]。具体仿真参数如表1所示。
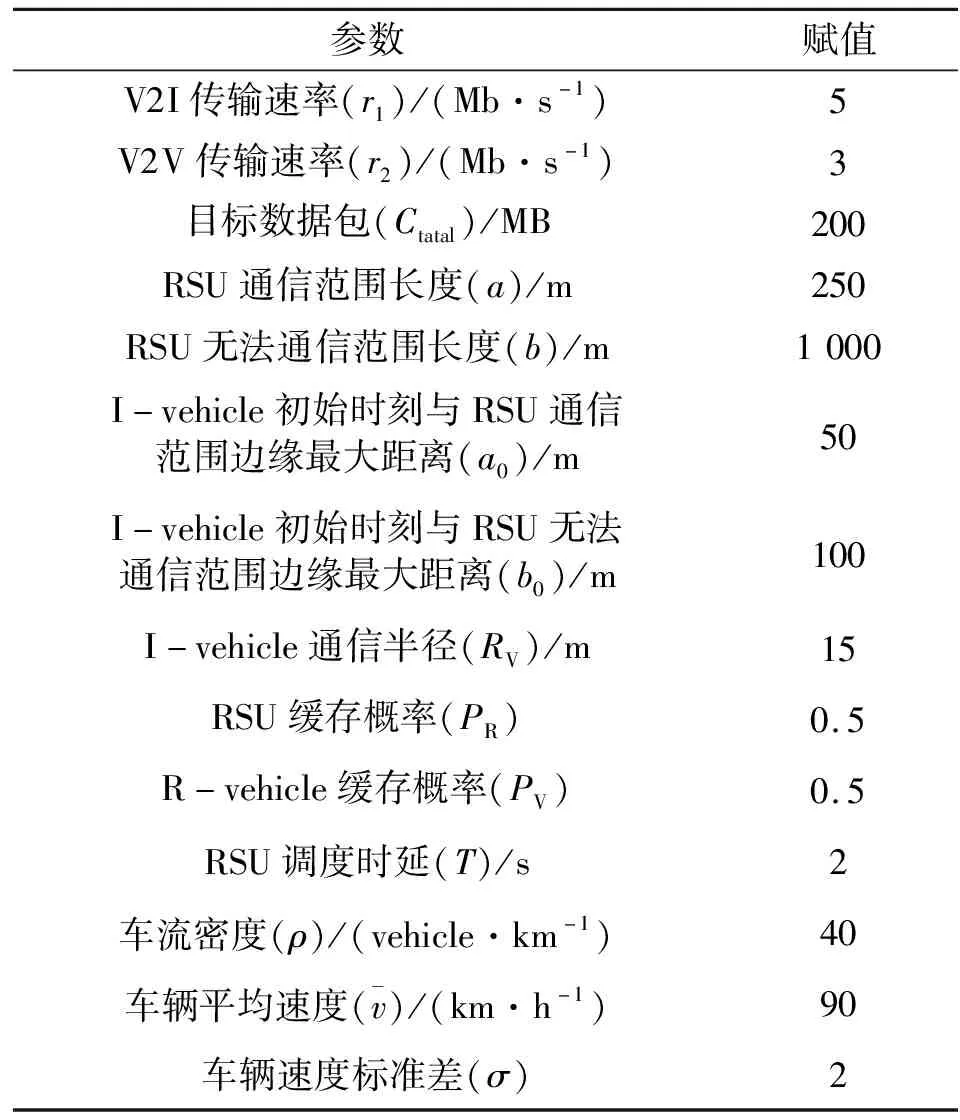
表1 仿真参数
由图3可知,I-vehicle在IoV协同通信下从请求数据到完成传输的整体过程,以及目标数据量随着时间增加而逐渐减少到零的变化关系。图示目标初值是指I-vehicle所请求的目标数据量;切换结点是指I-vehicle在通信过程中状态的变化;蓝线部分是指I-vehicle通过V2I方式通信;剩余红线部分是指I-vehicle通过V2V方式通信;平坦部分是指车辆处于“纯行驶”状态,周围无可进行数据传输的对象,单纯地向前行驶;斜线部分是指车辆处于“交流”状态,正与RSU或R-vehicle进行数据传输,同时向前行驶[12]。图3表明,I-vehicle在随机位置发出数据请求,最终在V2I/V2V协同通信下完成全部数据量的传输。
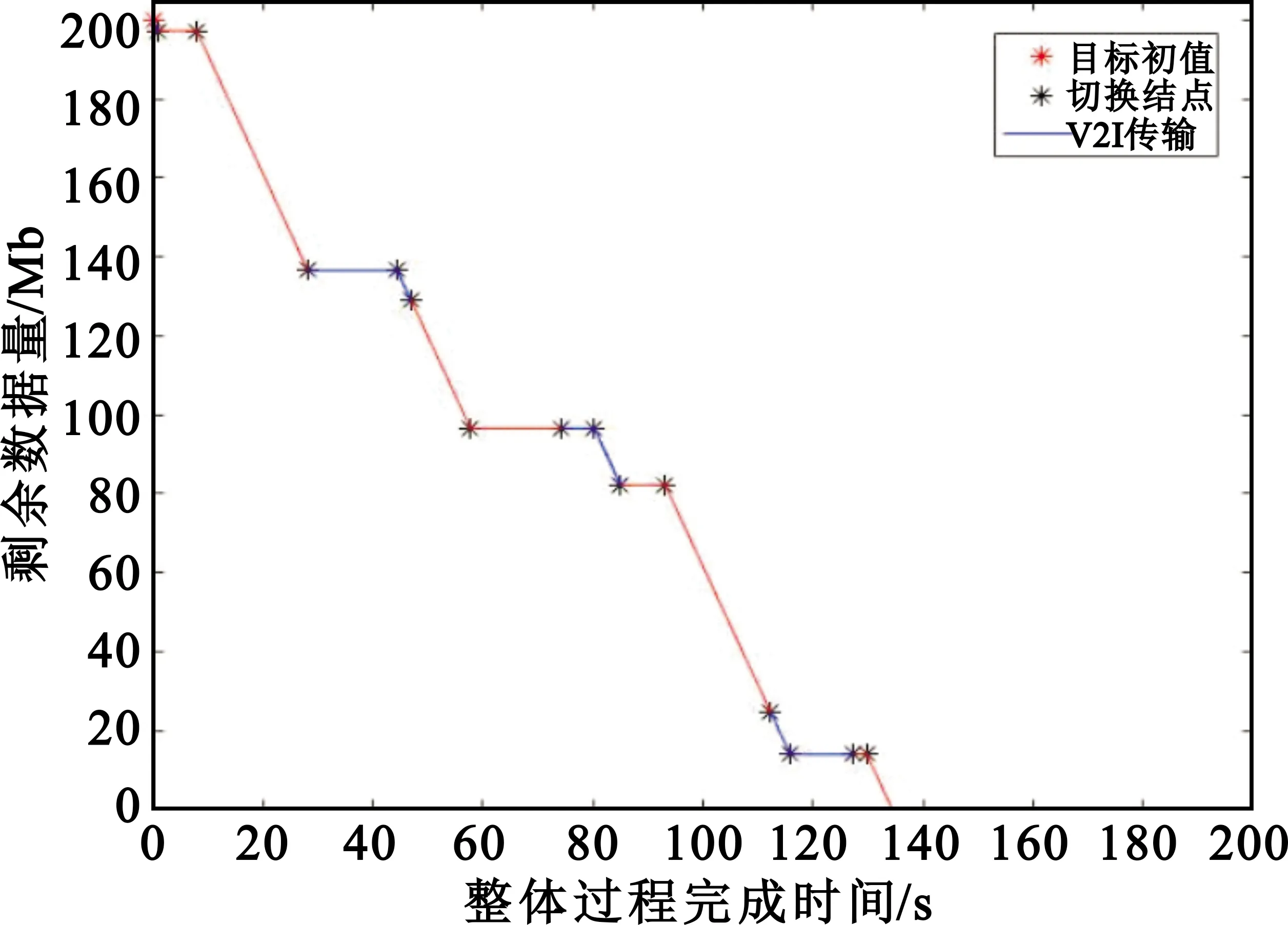
图3 整体行驶过程中剩余数据量随时间变化关系
如图4所示,将本文算法与文献[13-14]提出的两种新型传输算法进行对比。从图中可以看到,本文所提算法的整体消耗时间约为150 s,基于移动边缘计算(Mobile Edge Computing,MEC)车联网协作传输算法的整体消耗时间约为250 s,基于分簇V2X车载广播传输算法的整体消耗时间约为200 s。本文算法的整体消耗时间对比前者减少40%,对比后者减少25%,传输效率显著提升。这是因为基于MEC车联网协作传输算法的数据传输以V2I通信方式为主,通过移动边缘计算技术将数据缓存到RSU侧进行通信;基于分簇V2X车载广播传输算法的数据传输以V2V通信方式为主,通过将道路车辆进行分簇,每次数据传输选择传输速率大的车辆作为簇头,减少了RSU与车辆的信息传输次数。本文所提算法采用V2V和V2I协同通信,选择在最优环境下采用不同的通信方式,由于V2V和V2I时间需要不断切换,增加了复杂度,降低了整体消耗时间,提高了传输效率。由于车联网中更注重数据传输的实时性,因此,本文算法更具优势。

图4 三种传输算法所完成时间的比较示意图
图5给出了在不同通信算法中传输时间与RSU缓存概率之间的影响关系。图中曲线呈线性增长是由于RSU在道路侧的分布趋于均匀,则缓存数据的RSU也随之趋于均匀。两种传输算法中,I-vehicle在行驶过程中的平均传输时间都随着RSU缓存概率的增加而增加。这是因为随着RSU缓存概率增加,I-vehicle在V2I行驶过程中,对于未缓存数据的RSU从管理中心调度的等待时间减小,故而总体的传输时间随之增加,便于更快地完成目标数据量的获取[15]。从图中可以明显看出,V2I/V2V协同通信算法的传输时间大于V2I通信算法,可更有效地提高传输效率,从而有效降低整体过程消耗时间。
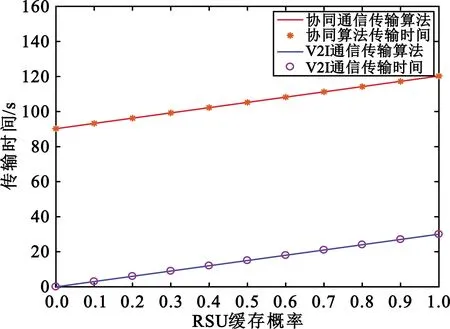
图5 不同算法中传输时间随RSU缓存概率的变化关系
图6给出了在不同通信算法中传输时间与车辆缓存概率之间的影响关系。图中曲线未呈线性增长是因为道路环境中缓存车辆的分布具有随机性,则受车辆缓存概率影响的关系曲线难以保持线性增长。两种传输算法中,I-vehicle在行驶过程中的平均传输时间都随着车辆缓存概率的增加而增加。这是因为随着车辆缓存概率增加,I-vehicle在V2V方式下,更易于找到对应的R-vehicle,减少了等待时间,该过程中传输的数据量增加,故而总体的传输时间随之增加[16]。从图中可以明显看出,V2I/V2V协同通信算法的传输时间大于V2V通信算法,可更有效地提高传输效率,从而有效降低整体过程消耗时间。

图6 不同算法中传输时间随车辆缓存概率的变化关系
4 结 论
本文通过对V2V/V2I协同通信的研究,提出对向车道CCT算法。通过建模分析了车辆在RSU通信范围和无法通信范围的传输过程,分析推导了此过程中目标数据的平均传输时间,并通过仿真验证了所提算法的合理性和准确性[17]。最终发现RSU缓存概率和车辆缓存概率是影响传输时间的关键因素,并得出结论:随着RSU缓存概率或者车辆缓存概率的增加,整体传输时间逐渐增加,这样更易于获取目标数据,缩短整体消耗时间。
猜你喜欢
中学生数理化·中考版(2022年6期)2022-06-05
卫星应用(2021年11期)2022-01-19
中学生数理化·中考版(2021年6期)2021-11-22
新世纪智能(数学备考)(2021年4期)2021-08-06
新世纪智能(数学备考)(2021年4期)2021-08-06
科学大众(2021年9期)2021-07-16
数学物理学报(2021年1期)2021-03-29
家庭影院技术(2020年12期)2021-01-18
中国交通信息化(2020年11期)2021-01-14
电子制作(2018年18期)2018-11-14