基于树莓派的预防性轻型除冰机器人行走控制系统设计
2021-04-23 05:00:24
电气传动 2021年8期
(华南理工大学电力学院,广东 广州 510640)
国内外在除冰机器人领域已有相关研究,加拿大魁北克研究院设计出HQ LineROVer遥控小车[1]清除线路覆冰,日本学者Hisato Kobayashi等人提出多车连接结构的蛇形巡检机器人[2]。上述两种机器人行走结构复杂、较难应用于工程实际。国内除冰机器人的研制也取得一定的研究成果[3-6]。文献[3]设计了一种PLC控制多电机配合,依据不同覆冰厚度选择不同行走除冰方案的除冰机器人,该设计考虑覆冰状况调整行走除冰方案,但其难挂载、重量大,事后式除冰设计无法进行预防性除冰;文献[4]设计了一种“防冰为先,防除兼备”的新型高压除冰机器人,通过覆冰前采取防冰措施以降低覆冰概率、达到更好的除冰效果,但其无法结合线路状况实现协调控制,且采用的电机数多、机构复杂;文献[5]设计了一种基于单片机控制可根据光强检测线路覆冰情况调整行走除冰方案,该方案受光照影响较大,且未考虑仰俯角影响以及预防性除冰方案。文献[6]分析了机器人攀爬行走受力情况,未考虑线路覆冰状况对行走控制的影响,也未提出预防性除冰的方案。此外,湖南大学、哈尔滨工程大学等高校均有相关研究,研制出相应的样机进行测试[7-9],但均为事后式除冰方案,装有厚重除冰装置,且厚冰情况下的除冰效果差。
综上所述,现有除冰机器人普遍存在机体结构复杂且重量大,挂卸载、维修困难等问题;基于事后式除冰的思路,即线路覆冰严重后再除冰,忽略了预防性除冰的重要性,往往导致线路发生严重受损的事故;且无法结合线路阻力和覆冰情况进行协调控制,难以适应复杂的除冰环境。
针对上述问题,本文基于往复式、预防性除冰的思路设计了一种基于树莓派(raspberry pie,RPI)和各种检测模块共同搭建的行走控制系统,可根据作业环境对预防除冰方案进行自主决策,使得机器人兼备预防性除冰与事后除冰的功能,可根据线路仰俯角、覆冰情况协调、调整行走与除冰策略,并自主判断线路折返点实现杆塔间往复式行走,机器人整体结构简洁、重量轻。
1 行走控制系统总体设计
除冰机器人行走控制策略如图1所示,行走控制系统主要由微型计算机RPI、仰俯角检测模块、超声波模块、图像采集模块、温湿度检测模块和电源模块共同组成。
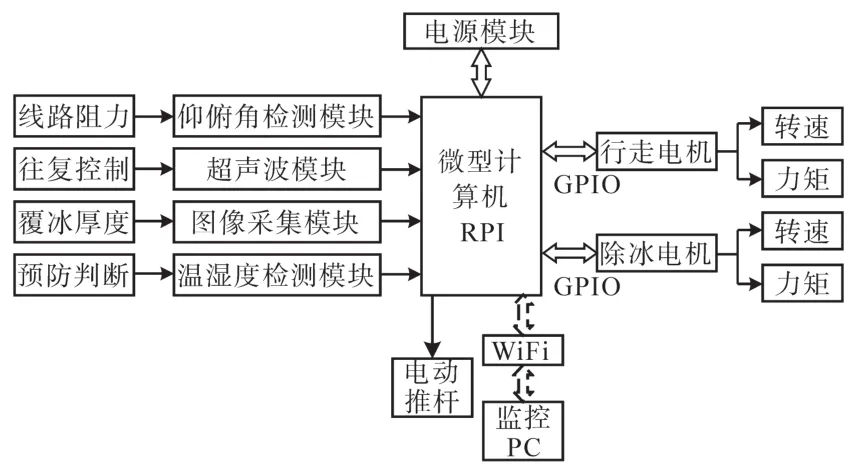
图1 行走控制策略框图Fig.1 The block diagram of the travel control strategy
机器人上线作业时,地面PC通过WiFi与RPI进行数据、图像传输,实现远程控制;温湿度检测模块负责监测作业的周围环境从而对预防性除冰动作进行决策;为获取线路阻力装设仰俯角检测模块,周期性采集线路仰俯角数据传输给RPI;图像采集模块采集线路覆冰状况并传输给处理器进行覆冰厚度分析;采用超声波模判断是否改变电机转向实现杆塔间往复行走;RPI分析处理各模块反馈信息,调节行走、除冰电机转速与力矩,实现行走控制与除冰控制的协调性。为保证导线与轮之间有效接触,另设电动推杆增大线轮间摩擦力兼备辅助制动功能;电源模块可为系统供电。
2 行走控制系统硬件电路设计
2.1 微处理器介绍
本文设计的硬件核心是基于RAM7的微型电脑RPI,搭载运行频率1.4 GHz的64位四核处理器,设有kMB以太网和双频WiFi可实现远程通信,设有40个端口允许访问27个通用输入与输出(GPIO),I2C,3.3 V和5 V电源,可外拓各种传感器。本文GPIO均采用功能物理引脚编号。本文使用的RPI 3B+支持远程图形化操作界面且可对机器人行为实时图像捕捉[10],相对于单片机能运行Linux等操作系统且运算性能更高,可完成复杂多重的任务监控管理与调度。
2.2 仰俯角检测电路设计
本系统采用RPI中wiringPi库的中断,周期性采集除冰机器人行走时线路仰俯角,仰俯角检测电路图如图2所示。
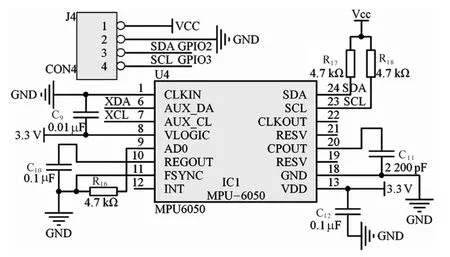
图2 仰俯角检测电路图Fig.2 The circuit diagram of the pitch angle detection
本系统采用了集成三轴MEMS陀螺仪和加速度计的MPU6050模块,拥有3个16位的ADC,能够满足精度的要求,寄存器通过I2C总线与RPI建立数据传输通道。地址数据总线SCL,SDA分别与 RPI的 GPIO3(SCL.1),GPIO2(SDA.1)相连接,工作电压采用3.3 V供电模式。
2.3 超声波模块及温湿度检测电路设计
图3为温湿度及超声波模块原理图。如图3所示,本设计采用的超声波模块选用HC-SR04模块,该模块性能稳定、测度距离精确满足需求。模块接口TRIG,ECHO分别与RPI的GPIO38,GPIO40相连。温湿度检测模块选用DTH11,它是集成温度湿度测量二合一的传感器,具有超小体积的特点。数据总线DATA与GPIO37相连。
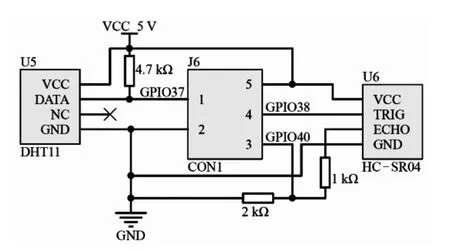
图3 温湿度及超声波模块原理图Fig.3 The schematic of the temperature & humidity and ultrasonic module
2.4 行走电机驱动电路设计
行走除冰电机均选用直流电机,采用L298N双路H桥路模块驱动,可实现正反转、PWM脉宽平滑可调。图4为行走电机驱动电路图。如图4a中RPI的GPIO25与ENA相连,GPIO23,24分别与IN1,IN2相连控制电机转向。为真实地反映机器人在线行走速度,采用如图4b中的EC11增量式旋转编码器检测行走电机的位置与转速。编码器安装于被动轮上防止主动轮打滑。通过RPI的GPIO12,GPIO1213检测A,B输出脉冲超前与滞后相位关系判断电机转向和码盘光栅间距弧度求取位移角速度。
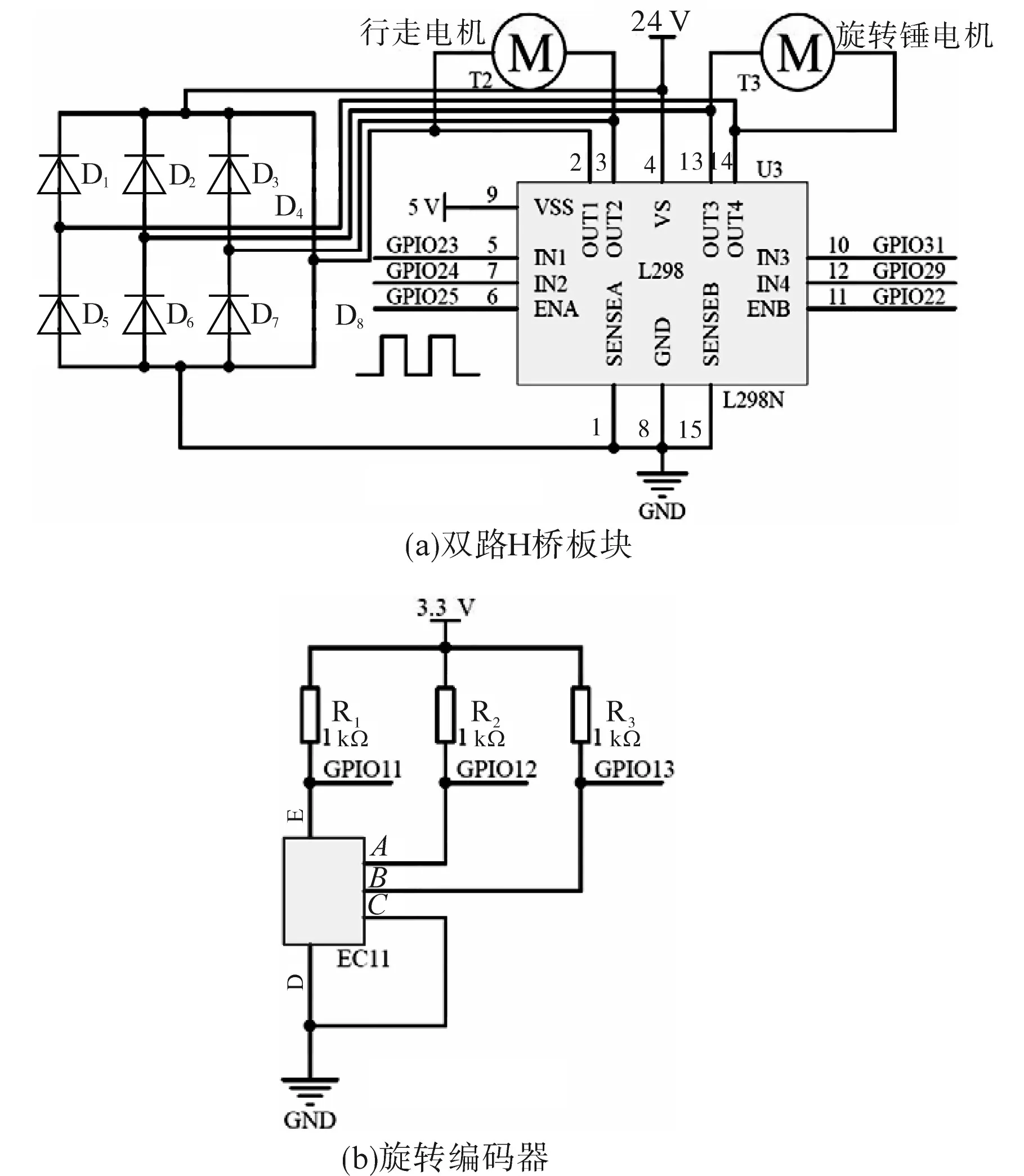
图4 行走电机驱动电路图Fig.4 Circuit diagram of travel motor drive
2.5 电源电路设计
机器人在高空执行任务需要可靠电能供应。本设计电源采用能量密度大的24 V∕1 kW·h锂电池。图5为电源模块电路原理图。
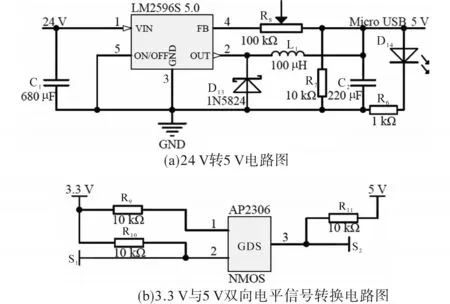
图5 电源模块电路原理图Fig.5 Circuit schematic diagram of power module
考虑到系统存在多种电平,锂电池输出电压24 V,RPI需5 V供电,设24 V转5 V降压电路,如图5a采用LM2596S芯片,电路最大电流输出3 A满足RPI 5 V∕2.5 A的正常工作需求。RPI最大允许输入电压3.3 V,而传感器一般为5 V电压信号,本设计采用的AP2306MOS管可实现5 V-3.3 V电压双向变换,如图5b所示,S1,S2分别为变换电压信号。
3 行走控制系统软件设计
系统程序是基于Python语言在RPI的Linux系统下实现的,行走控制总流程框图如图6所示,初始化地面监控PC与RPI建立远程通信;机器人根据作业环境自主决策预防性除冰动作,满足预防性除冰条件后对线路仰俯角、覆冰图像等多维信息进行周期性采样。结合力学建立电机转速与仰俯角模型,得到满足驱动力需求下转速n1;通过图像采集获取线路当前覆冰情况并计算覆冰厚度,在有效除冰情况下协调控制行走电机输出最大不打滑速度n2;因此行走电机理论转速n=min(n1,n2)。超声波对行走方向作出判断后,调用PWM转速调整程序实现闭环控制。
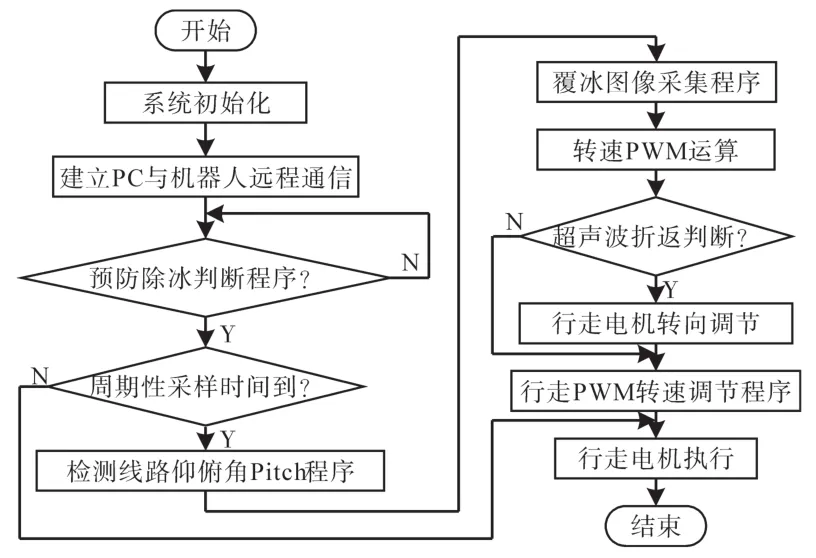
图6 行走控制总流程图Fig.6 General flow chart of travel control
3.1 预防除冰动作判断程序设计
除冰机器人被挂载在线路上处于待机状态,作业前需进行预防除冰动作自主决策。图7为预防除冰动作判断流程图。如图7所示在接受到作业指令后,系统中温湿度检测模块周期性测量作业环境的温度值TM、湿度值HM,当检测值满足预设范围时,产生并发送预防除冰任务指令触发RPI执行杆塔间预防除冰任务以及采取相应的除冰措施,包括:涂抹憎水性涂料和喷洒抗冻化学试剂,实现自主决策预防除冰动作。
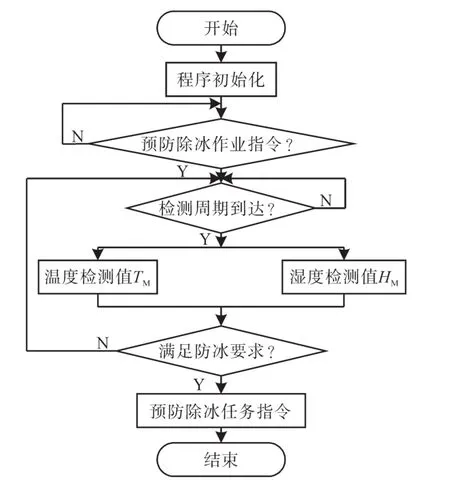
图7 预防除冰动作判断流程图Fig.7 The flow chart of the preventive deicing action judgment
3.2 仰俯角检测程序设计
为获取机器人行走时所受阻力,需对线路的仰俯角进行检测。图8为仰俯角检测流程图。线路的仰俯角检测系统由RPI和MPU6050共同完成。如图8所示,首先初始化I2C总线并与PU6050建立数据通道;接收到触发指令后,内嵌指令I2cdetect捕捉MPU6050的地址并用i2cdump指令读取寄存器中三轴的加速度和角速度AD值。采用四元数法[11]即利用DMP库将6个数据转换为四元数,从而测出仰俯角Pitch,通过主程序周期性触发实现不间断检测。
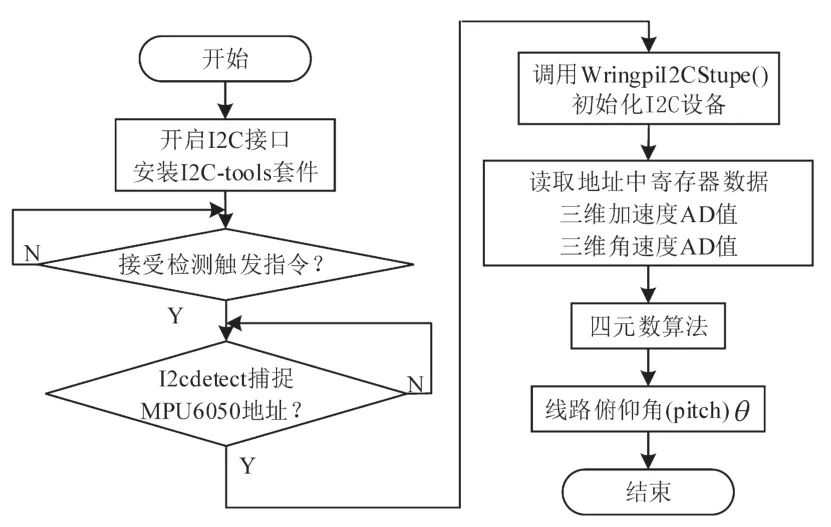
图8 仰俯角检测流程图Fig.8 Flow chart of line elevation angle acquisition
3.3 覆冰图像采集程序设计
本设计采用500万像素的排线摄像头,能高清晰度检测线路覆冰情况。图9为覆冰图像采集流程图。如图9所示,接收到采集指令后对线路覆冰图像采集并储存。处理过程包括图像灰度化、对图像进行去噪和去除背景等预处理,只保留图形前景,提取覆冰前后线路像素值,计算线路覆冰厚度[12]。并在有效除冰条件下计算出除冰电机的转矩与转速。
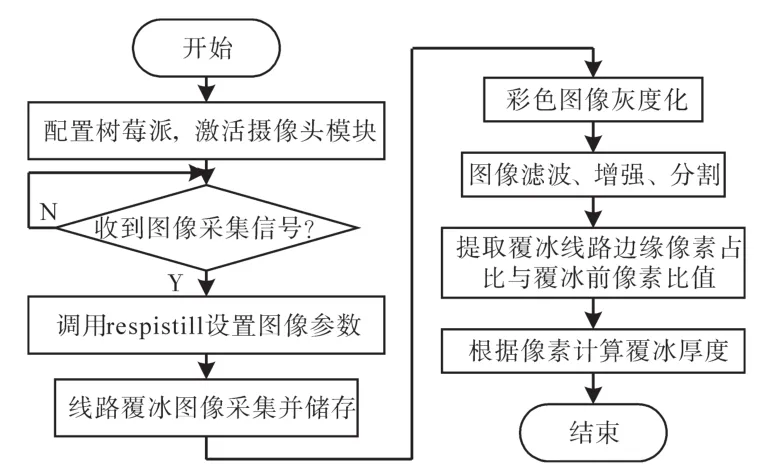
图9 覆冰图像采集流程图Fig.9 Flow chart of ice image acquisition
3.4 超声波折返判断程序设计
实现杆塔间往复式行走需对折返点做出判断,利用超声波对前后障碍物测距判断,进而调整电机转向。图10为超声波折返判断流程图。如图10所示,RPI的GPIO口输出脉冲给Trig触发模块测距并开始计时。若有信号返回,Echo端口电平由高变为低,RPI端口记录高电平持续时间tH,测试距离D1=tHv∕2,v为声速取340 m∕s,比较D1与允许距离D2决定是否产生并发送转向信号,本文采用的超声波避障模块为HC-SR04模块。
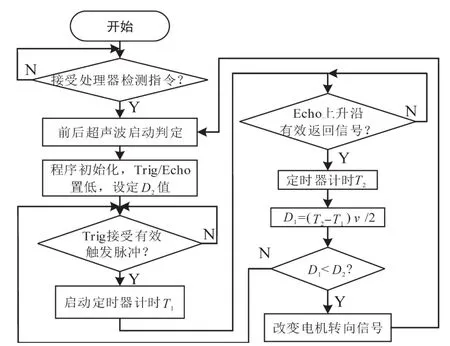
图10 超声波折返判断流程图Fig.10 Flow chart of ultrasonic reentry judgment
3.5 行走电机PWM转速控制程序
行走电机是通过PWM波控制L298N模块进行调速的,图11为PWM调速程序流程图。如图11a所示,主程序先初始化PWM,设置GPIO18为PWM输出端口,然后周期性查询是否接收到控制指令,若接受到,则调用中断子程序如图11b所示,根据当前机器人对线路状况分析处理后的转速,将其对应的脉宽数列更新寄存器脉宽值,并设计判断行走电机转速控制是否采用闭环控制,本文采用PID控制行走电机转速稳定跟踪结合线路仰俯角和覆冰情况计算出的转速,经运算后的脉宽占空比储存在脉宽寄存器中,最后输出控制行走电机转速。
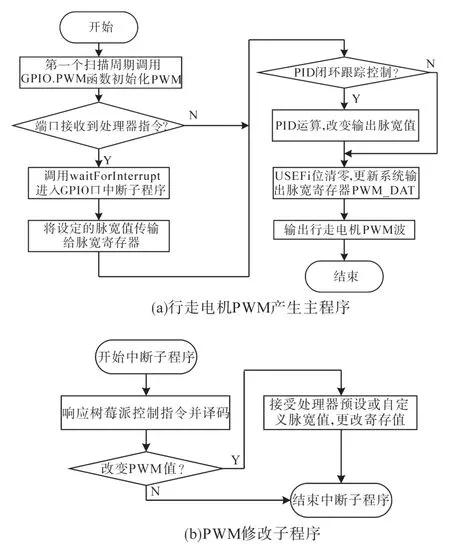
图11 电机PWM调速程序流程图Fig.11 Flow chart of motor PWM speed regulation program
4 行走试验
4.1 除冰机器人整体机构
除冰机器人的整体为“T”型架构,机身采用铝合金焊接而成,在满足刚度需求下尽可能降低自重;顶部搭载“M”型无人机挂卸载机构,可实现挂卸载动作的遥控;单电机驱动简化行走机构、降低装置自重;采用多种除冰方式的综合除冰机构以适应复杂的作业环境,结合线路覆冰情况采取不同的除冰方案;底部机箱搭载供电电源和各种转接电路模块。
图12为除冰机器人的机械结构设计示意图,装置总重12 kg。
图12中各数字代表器件名称如下:1为架空线;2为“M”型钩架;3为“T”型支架;4为主动轮;5为夹紧轮;6为电动推杆;7为螺旋导轨;8为步进位移电机;9为机箱;10为除冰电机;11为除冰锤和旋转直杆;12为行走电机;13为摄像头;14为固定电机铝板;15为引流条;16为覆冰;17为喷洒管;18为联轴器及固定槽装置。
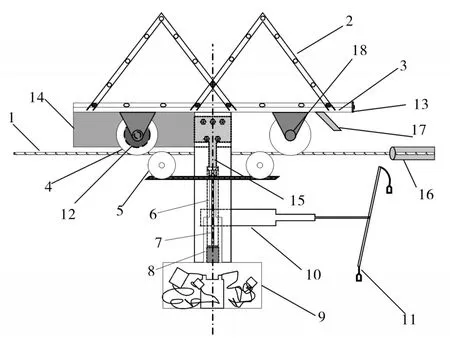
图12 除冰机器人设计示意图Fig.12 Design sketch of deicing robot
4.2 样机试验
考虑到实地试验条件苛刻且存在安全问题,因此在地面上进行模拟行走除冰试验,试验测试内容包括:遥控无人机挂卸载,上下坡行走测试,线路仰俯角与图像采集测试。测试表明无人机可通过“M”支架平稳地将除冰机器人挂卸载在输电线上。经如图13所示的行走试验分析,除冰机器人启动和加速时机身摆动幅度较大,但匀速旋转敲冰和行走时,摆幅较小,能够稳定行走在输电线上;RPI实时检测线路仰俯角度和覆冰状况,并对行走电机进行无极调速,调速范围:0~0.21 m∕s;机器人爬坡角度极限为20°;模拟除冰机器人执行除冰作业实验如图14所示,除冰电机转速260 r∕min,预防性除冰作业中可清除5 mm以内的覆冰并可很好对线路采取防冰措施。可较好地判断线路转折点完成架空线路往复式除冰任务。综合评价上述所测性能参数,机器人行走机构基本满足各项设计指标。

图13 除冰机器人行走测试图Fig.13 Walking test chart of deicing robot
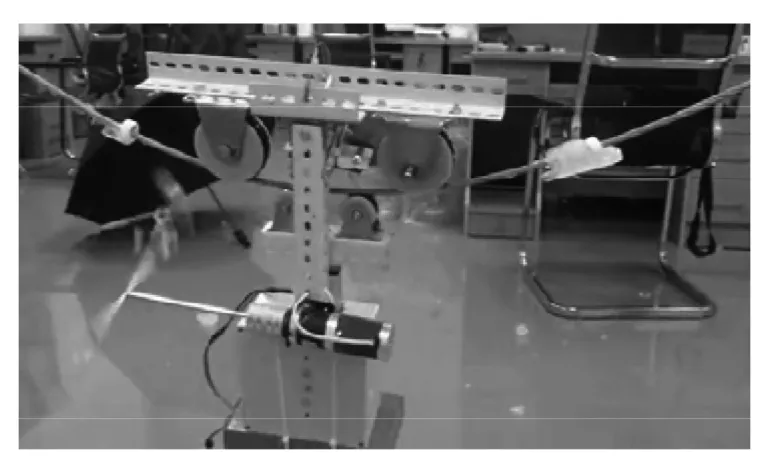
图14 除冰机器人除冰测试图Fig.14 Deicing test chart of deicing robot
5 结论
本文分析了现有除冰机器人的研究现状,针对当前研究的除冰机器人存在结构复杂、重量大,采取覆冰后除冰方式除冰难,忽略了防冰的重要性,无法结合线路状况协调行走除冰策略等问题,设计了一种基于树莓派的预防性轻型除冰机器人行走控制系统,该系统可根据作业环境自主决策预防除冰任务,包括行走除冰和防冰措施,极大地降低线路除冰难度和线路因覆冰导致停电事故的概率;预防除冰作业中周期性检测线路仰俯角和采集线路覆冰情况,保证在有效除冰的情况下,控制行走电机输出转速与力矩;同时利用超声波检测塔间折返点,实现覆冰前机器人可在两杆塔间进行往复式预防性除冰;设计出除冰机器人样机,行走驱动采用单电机,简化机构、降低了整体重量;最后样机的行走除冰试验验证了设计的可行性。
猜你喜欢
电子制作(2018年17期)2018-09-28 01:56:38
军事文摘·科学少年(2016年7期)2016-09-20 16:49:54
河南科技(2016年8期)2016-09-03 08:08:22
河南科技(2016年6期)2016-08-13 08:18:29
电子制作(2016年21期)2016-05-17 03:52:47
水利科技与经济(2016年4期)2016-04-22 03:49:32
汽车维护与修理(2016年3期)2016-02-28 13:17:03
工程建设与设计(2016年3期)2016-02-27 10:50:50
西藏科技(2015年1期)2015-09-26 12:09:22
浙江共产党员(2014年12期)2014-07-10 03:30:06