基于机器学习的汽车后视镜气动噪声预测方法
2021-04-19 02:14汪怡平张成才苏楚奇苏建军
汽车工程学报 2021年2期
孙 浩 ,汪怡平 ,张成才 ,苏楚奇 ,苏建军
(1.现代汽车零部件技术湖北省重点实验室,武汉理工大学,武汉 430070 2.汽车零部件技术湖北省协同创新中心,武汉理工大学,武汉 430070 3.湖北省新能源与智能网联车工程技术研究中心,武汉理工大学,武汉 430070 4. 湖北省齐星汽车车身股份有限公司,湖北,随州 441300)
随着汽车产业的发展及消费者对出行品质要求的提升,气动噪声作为高速行驶时的主要噪声也日益受到乘客及研发人员的重视,而后视镜作为汽车的重要组件及主要气动噪声源,如何设计开发低噪的后视镜成为众多学者研究的课题。
国内外各大汽车公司为了降低汽车的气动噪声,修建能够进行整车试验的声学风洞,但风洞只能进行原型车的气动噪声测试[1]。通过气动声学数值模拟进行结构优化,需要研发人员具有深厚的理论功底和丰富的工程经验,而且采用基于瞬态流场的气动声场的优化需要耗费大量的计算资源和时间,从而导致开发周期长、成本高等问题。
机器学习作为现代计算机科学与人工智能的核心,其本质是通过算法直接从已知数据中“挖掘”信息并“学习”规律,进而将“学习”到的规律应用到新的数据样本中,从而实现对未知数据的预测[2]。利用机器学习对已有的后视镜气动噪声数据进行学习,从而预测得到不同特征下后视镜的气动噪声值,不仅降低了研发成本,还缩短了开发周期,更重要的是可以避免工程人员重复工作,有助于训练新的工程师[3]。
从“获取数据”到实现“机器学习”的最终目的,机器学习一般可分为收集数据、数据预处理、评估预测模型、参数调优等过程[4]。机器学习的算法种类有很多,基于真实数据和适当算法才能得到泛化能力强的预测模型。
支持向量机算法的提出是针对线性分类问题的,之后逐渐地向非线性、多分类、回归预测等问题上拓展[5]。支持向量机以统计学理论为基础,结合核函数理论及最优化理论等优点,能很好地解决过学习、欠学习、局部极值、维数灾难等问题,而且在小样本、非线性等问题上也有很好的发挥空间[6]。
本文将支持向量回归机算法应用到后视镜气动噪声预测中,通过瞬态流场与声场联合仿真得到气动噪声数据集,利用不同数量样本数据训练支持向量回归机得到的预测模型能在短时间内获得高精度的预测值,从而为快速得到气动噪声值提供了一种新方法。
1 支持向量回归机算法
支持向量回归机(SVR)的目标是在寻找最优超平面的过程中使所有样本点靠近超平面,离超平面的总偏差最小。支持向量回归机包括ε-SVR、ν-SVR等几种主要类型。ε-SVR的定义为:如果x点处的预测值f(x)与实际值y之间的差别绝对值在ε之内,则认为该点的预测值是无损的[7]。即存在超平面f(x) =ωTx+b使得ε> 0,f(x) =ωTx+b就定义为样本集合S的ε-线性回归。其中使|f(x) -y| ≤ε等号成立的点称为“支持向量”,两个异类支持向量到超平面的距离和称为“间隔”。为了使预测结果更为精确,显然要寻求最优超平面的最大间隔,即:

支持向量回归机要解决一个最优化问题,其形式为:

式中:C为惩罚系数。
对于线性不可分的函数,要通过函数K(xi,xj)将样本从原始空间映射到一个更高维的特征空间,从而计算得到高维空间中的内积值,K(xi,xj)就称为核函数[8]。目前研究最多的核函数有多项式核函数、高斯核函数、Sigmoid核函数,由于高斯核函数学习能力强且偏差小,所以本文采用高斯核函数。
将式(2)采用拉格朗日乘子法求解并进行对偶变换,引入核函数得到:
最终得到预测决策函数为:

2 联合仿真方法验证
2.1 后视镜模型
验证采用的后视镜模型如图1所示,由直径和高度均为0.2 m的1/2圆柱及1/4球体组成。该模型的气动噪声数值有试验数据可供参考[9-10]。

图1 后视镜模型
2.2 流场计算
后视镜外流场计算域如图2所示[10]。该计算域长3 m,宽1.6 m,高1.44 m,速度入口离后视镜1.15 m。
后视镜模型表面网格尺寸为2 mm,计算域边界网格尺寸为64 mm。为更有效地模拟模型表面的气流分离情况,在模型表面生成5层总厚度为3 mm,延伸率为1.5的边界层网格。减少网格数量的同时要保证计算精度,建立最大网格尺寸分别为4 mm、8 mm、32 mm的3个控制域,如图3所示。

图2 流场计算域

图3 控制域分布
最终整个计算域的网格总数约140万个,边界条件设置见表1。
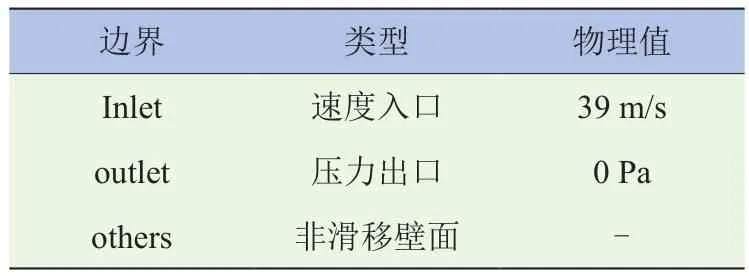
表1 流场计算边界条件
采用STAR-CCM+进行流场计算,基于Realizablek-ε湍流模型的稳态结果,进行瞬态流场计算。瞬态计算的湍流模型为大涡模拟,研究表明,后视镜产生的气动噪声集中在中低频段[10],因此,最高频率设为1 000 Hz,根据Nyquist采样理论和库朗数要求[11]确定瞬态时间步长Δt为2×10-4s,采样时间为0.2 s。
2.3 声场计算
采用积分插值的方法将流场信息映射到声学网格中,声学计算基于声学软件包Actran。根据流场计算结果,建立外声场网格模型,如图4所示,从内向外分为声源区、声传播区和无限元边界。
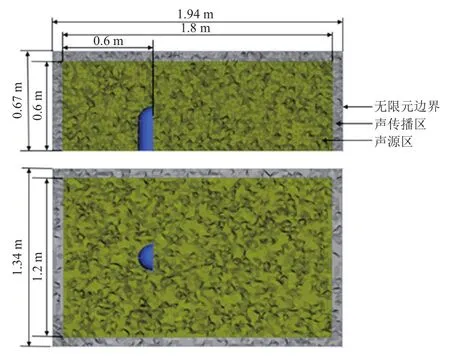
图4 外声场网格
声源区长1.8 m,宽1.2 m,高0.6 m,无限元边界模拟无反射边界,两者之间为声传播区,厚度为0.07 m。计算最高频率为1 000 Hz,由于每个波长需要包含6~8个网格单元才能保证计算精度[12],因此,设置声场网格尺寸为35 mm,最终声学网格总数为21万个。
声学计算的边界条件设置见表2,频率范围为20~ 1 000 Hz。

表2 声场计算边界条件
为了与试验数据进行对比,设定与试验相同的测点A,如图5所示。选取测点A处的数据进行对比[9-10]。

图5 测点布置图
2.4 结果对比
测点A处的计算与试验频谱曲线对比如图6所示。结果表明,测点处的频谱趋势与试验一致,随着频率的增加,声压级逐渐减小,而且最高声压级都在80 dB左右,两者相差约1.7 dB,误差在容许范围之内。所以本文采用的基于瞬态流场的声场计算具有较高的精度,能够用于数据集的获取。最终计算得到测点A的总声压级为93.71 dB。

图6 频谱曲线对比图
3 数据集的获取及预处理
3.1 后视镜基本特征参数
后视镜产生的气动噪声受其外形及安装角度等多因素影响,从后视镜的基本要素出发,选取前脸厚度L、后脸深度d、迎风角度θ作为特征参数[10],如图7所示。

图7 后视镜参数示意
3.2 数据集获取
前脸厚度L、后脸深度d、迎风角度θ的变化水平见表3。
在保证边界条件、时间步长等均与基础模型相同的情况下,对表内特征组合的64组后视镜模型进行仿真计算,获得相同监测点处的气动噪声数据,将其特征参数值、总声压级值分别作为完全仿真数据集的输入和输出。数据集分为两组,训练样本集和测试样本集,随机选择其中4组数据作为测试样本集,剩余样本为训练样本集。
(1)掺加粉煤灰可以降低混凝土的孔隙率、水与气体渗透性。掺量在30 %以内,混凝土的水和气体渗透系数均随粉煤灰的掺量增加有较明显的降低,但降低混凝土气体渗透性的最佳掺量是30 %,而降低混凝土水渗透性的最佳掺量是40 %。

表3 参数变化水平
3.3 数据预处理
数据预处理是对原始数据集进行必要的清洗、集成、转换等操作,使数据达到完整性好、冗余性少、属性相关性小等要求[13]。
由于特征参数变化水平及量纲的差异,采用归一化按比例缩放数据,使其落入一个小的特定区间[0,1]:

式中:为归一化后的特征参数数据;xi为初始特征参数数据;xmax和xmin分别为初始特征参数数据中的最大、最小值;m为样本个数。
预处理后的测试样本点特征值及对应的总声压级见表4。
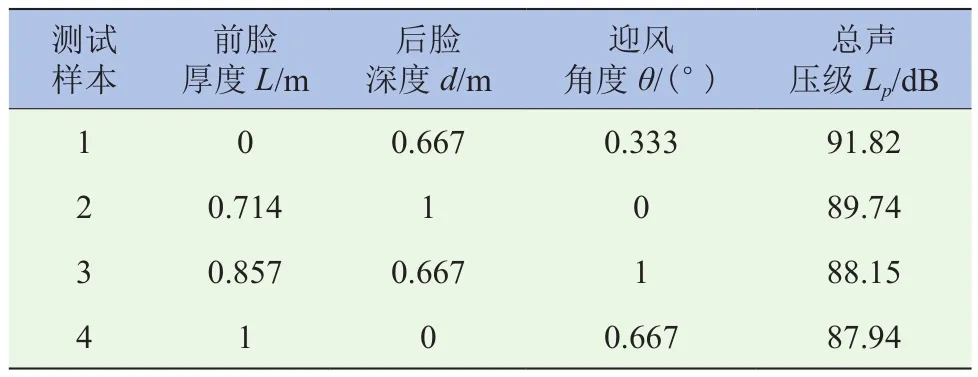
表4 预处理后的测试样本点特征值及总声压级
4 支持向量机回归预测
4.1 预测模型建立及预测结果分析
对完全仿真数据集进行预处理,以后视镜特征参数为输入值,该特征参数下的总声压级值为输出值。在训练样本集的基础上,根据支持向量回归机的基本原理,选择高斯核函数的参数及惩罚因子、损失函数等相关参数来构建决策函数[14],采用快速有效的SVM回归算法来获得最终的后视镜气动噪声预测模型,可对测试集样本进行预测得到总声压级预测输出值,并采用相关指标对预测效果进行评价。
大量的实践证明[14],高斯核函数参数σ默认数值是1/k(k为输入数据中的特征数),本文设定输入值为前脸厚度、后脸深度和迎风角度3个特征属性值,则σ=0.33;惩罚因子C的默认值为1;损失函数p的默认值为0.1。
利用完全仿真数据集的训练集数据训练设置好参数的支持向量回归机模型,进而对测试集样本进行预测,得到的预测值见表5。

表5 完全仿真数据集测试集样本预测值
MSE(平均平方误差)和MAPE(平均绝对百分比误差)是衡量预测结果的两个指标:
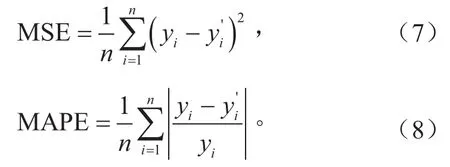
式中:yi为真实值;为预测值;n为测试集样本数。
计算得到完全仿真数据集下MSE=0.32,MAPE=0.15%。两个评价指标值都很小,且均在容许的范围之内,证明通过完全仿真数据集训练得到的支持向量回归机预测模型具有较高精度,而且预测一次需求时间很短,所以通过机器学习构建的预测模型能够快速准确地得到目标的气动噪声值,解决了风洞试验及仿真费时长、资源消耗大的问题。
4.2 变化样本数量预测结果分析
设计两个样本数量减小后的数据集方案同完全仿真数据集下的预测结果进行比较分析。方案一通过正交试验法挑选出完全仿真数据集中具有代表性的组合[15],组成正交设计数据集,利用应用广泛的L32(43)正交表得到的数据组合见表6。方案二在完全仿真数据集中随机选择测试样本外的44组数据作为部分仿真数据集的训练样本集。
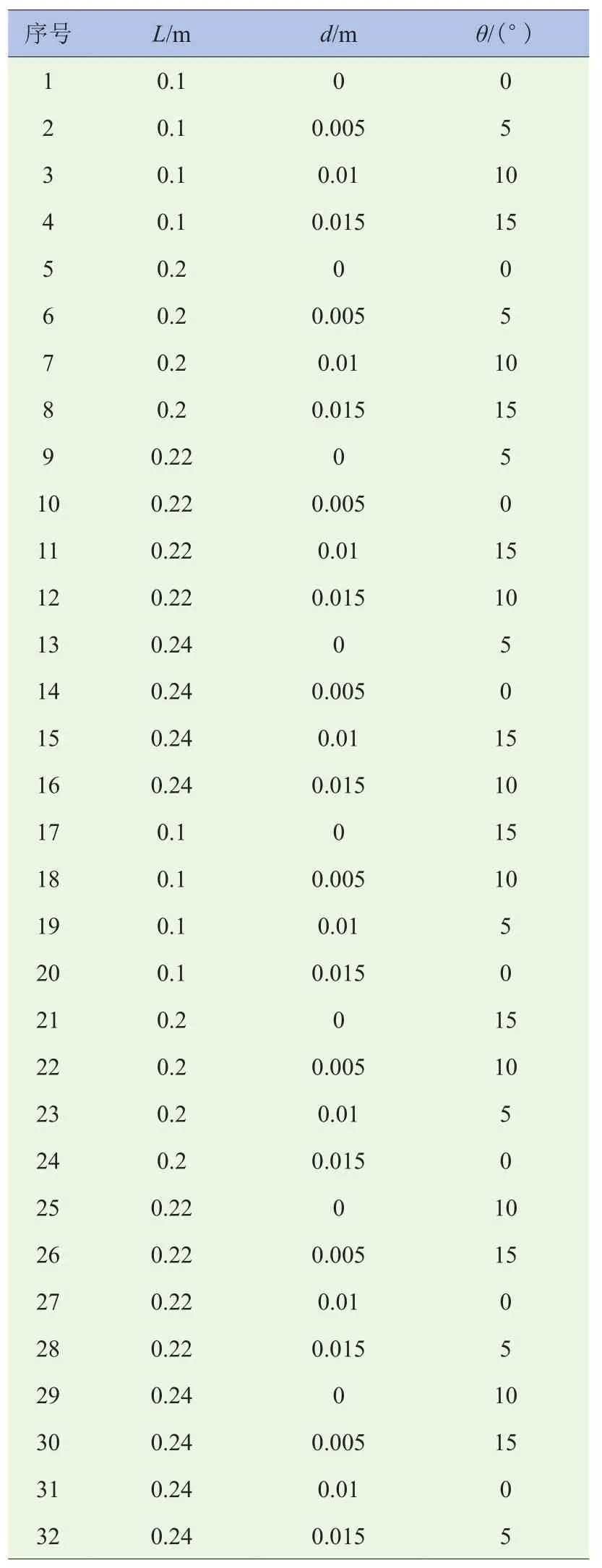
表6 正交数据组合表
按照相同的方法利用两种方案的训练集数据训练设置好参数的支持向量回归机模型,进而对测试集样本进行预测,得到的预测值见表7。
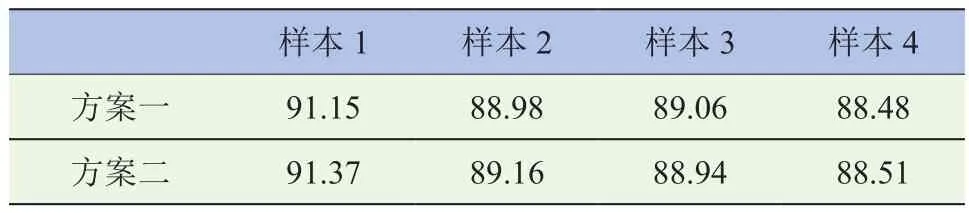
表7 方案一、二测试集样本预测值 单位:dB
为了与完全仿真数据集的预测结果进行对比,计算方案一、方案二相对于完全仿真数据集在各个预测点处的预测误差见表8。
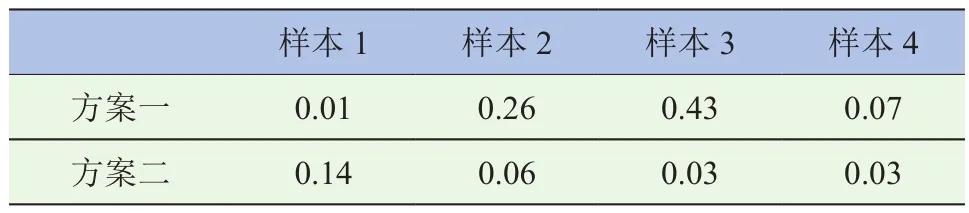
表8 方案一、二相对完全仿真数据集的预测误差 单位:%
由表可知,方案一和方案二相对于完全仿真数据集的预测误差很小,均在0.5%以内,满足工程的实际要求。因此,在精度达到要求的基础上,为减小工作量,可选用训练样本较少的数据集作为构建预测模型的方案。
5 结论
本文通过机器学习方法实现对后视镜气动噪声的预测,通过构造样本数量不同的数据集来训练支持向量回归机模型,分别对同一测试集预测得到预测值。对比预测值和实际值,结果表明,不同样本数量数据集下得到的模型均有较高的预测精度和较快的预测速度,证明利用机器学习进行汽车后视镜气动噪声的预测是有效可行的;而且在精度达到要求的基础上,为减小工作量可选用训练样本较少的数据集作为搭建预测模型的方案,这也为快速准确地得到气动噪声值提供了一种新方法。
6 致谢
感谢随州市科技局新能源、轻量化、智能化专用汽车关键核心技术研发项目——新型纯电动物流车用半导体冷藏关键技术。
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
农业工程学报(2022年12期)2022-09-09
中国新通信(2022年3期)2022-04-11
北京航空航天大学学报(2021年9期)2021-11-02
汽车工程(2021年12期)2021-03-08
汽车工程(2021年12期)2021-03-08
少儿科技(2021年4期)2021-01-11
锦绣·下旬刊(2020年9期)2020-01-28
振动工程学报(2019年2期)2019-05-13
发明与创新·中学生(2019年2期)2019-02-26