多点定位系统数据格式分析与研究
2021-04-15 01:11干浩亮吴世桂李运生刘立翔杨翱飙
现代导航 2021年1期
干浩亮,吴世桂,李运生,陈 龙,刘立翔,杨翱飙
(重庆机场集团有限公司,重庆,401120)
0 引言
中国经济的高速增长促进了中国民航业的快速发展。2019年,重庆江北国际机场完成旅客吞吐量4478.7 万人次、货邮吞吐量41.2 万吨,飞机起降31.8 万架次,其中旅客吞吐量增速位列全国十大机场首位。目前重庆机场已经形成了三条跑道和三座航站楼同时运行的复杂格局,四跑道及配套工程正在规划建设中。机场飞行区内跑道、滑行道和联络道布局也日趋复杂,此外机场场面内飞行器和作业车辆的活动也日益频繁,如何有效提升管制人员对机场场面活动目标的监视能力,降低安全隐患,成为机场场面监视亟待解决的问题。
传统机场场面监视手段是依靠塔台管制人员目视指挥,在能见度低和夜晚条件下,安全性不高,容量有限,不适合繁忙枢纽机场。场面监视雷达的应用,能对飞行区内飞行器和车辆进行监视,并提供冲突预警,取得了良好的效果,有效地保障了地面安全,缓解了管制员、飞行员、场内特种车驾驶员和地面安全监视人员的工作压力,但是场面监视雷达在使用中有以下几个问题:
(1)不能直接确定飞机识别代码;
(2)由于机场建筑物遮挡,存在盲区,假目标多;
(3)工程造价高,维护成本高。
多点定位技术作为一种新的场面监视技术,与场监雷达相比,具有精度较高,更新率高,可准确获得飞机呼号、代码,布站灵活、安装简单(无盲区)等优势,可以有效实现对场面飞机和其他运动目标的监视与识别,提高机场场面的运行效率和安全水平。
若多点定位系统与其他系统(如场监融汇系统、场监雷达等)互联,协同工作,能更好地发挥作用,但这就要求不同系统之间报文的传输格式具有统一的标准[1]。因此,深入解析和探讨多点定位系统数据报文格式有助于我们提高对多点定位系统的应用和保障能力。
本文以目前重庆江北国际机场(以下简称重庆机场)已安装建设的国产多点定位系统报文格式为例进行详细分析与研究。
1 多点定位系统在重庆机场的应用
重庆机场多点定位系统主要用于对塔台管制员关注的活动目标:进港、离港和在地面滑行的飞机以及在飞行区内移动的车辆。目前,重庆机场的多点定位系统共有59部接收机,10部询问发射机,2 部参考基准站。
重庆机场所安装建设的多点定位系统,选用的中国民航第二研究所自主研发的MPS-I型场面多点定位系统。MPS-I 型场面多点定位系统主要由远端接收站、询问发射机、参考基准站、中心处理站、监控系统和信息传输网络。系统结构图如图1所示。
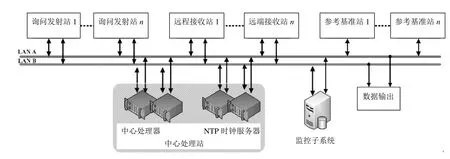
图1 场面多点定位系统总体结构图
多点定位系统在重庆机场建成投用后,有效提升了机场场面的监视能力和运行效率。能够覆盖跑道、滑行道、停机位等关键区域,并且定位误差小于7.5 m(95%)和12 m(99%),机动区目标更新率大于95%。
2 ASTERIX 协议简介
重庆机场安装建设的多点定位系统数据报文格式是基于欧洲航空安全组织为雷达数据传输和交换定义的一种结构化协议[2](All purpose Structured Euro-control Radar Information exchange format,ASTERIX)。早在20世纪80年代,欧洲雷达系统专家组(RSSP,该机构现已被欧洲航空安全组织接管)为了解决欧洲各国之间雷达数据格式标准不一致,无法以一种统一的方式进行雷达数据传输和交换的问题,制定了通用的雷达数据格式,即为ASTERIX 协议[3]。该协议定义了监视数据编码的框架结构,本质上是一个数据的定义和集合,具有格式统一、易于扩展、可以更新、新版本能对老版本兼容等优点,其目的是可支持不同监视设备之间按照约定的格式进行信息交换。目前,ASTERIX协议已经成为了国际标准,涵盖了一次场监雷达、二次雷达、多点定位系统等监视设备,以及空管自动化、场监融汇系统、数据中心等相关设备[4]。
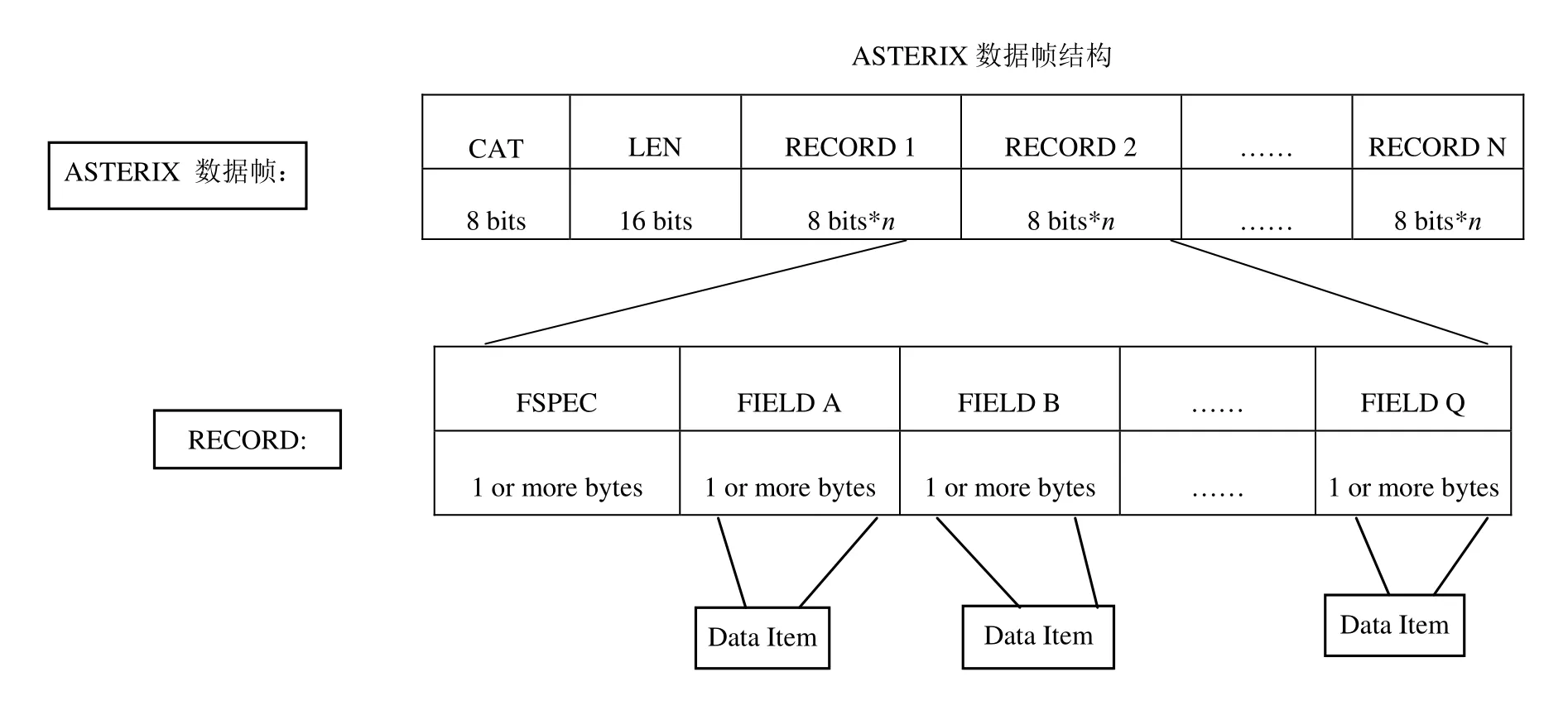
在ASTERIX 协议中,数据报文按其内容而被应用分离为一个个独立的信息单元,即ASTERIX数据帧,通过网络进行传输。ASTERIX 数据帧包括数据类型(CAT)、数据长度(LEN)、数据记录(RECORD)、字段描述(FSPEC)、数据项(DATA FIELD)等字段[5]。ASTERIX 数据帧结构如图2所示。ASTERIX 数据帧可包含一个或多个包含同一类别数据的记录,但在实际应用中通常只有一个数据记录。
(1)CAT:表示数据类型,数据根据用途分为不同类别,以便于进行分辨。它总共可定义256种类型,其中0~127 为民用和军用监视数据,128~240 为特殊军事用途监视数据,241~255 为非标准的民用和军事用途监视数据。重庆机场多点定位系统的数据格式为ASTERIX CAT10。
(2)LEN:表示 ASTERIX 数据帧的总长度,字段为2 个字节。表示CAT 字段(1 字节)、LEN字段(2 字节)、FSPEC 字段、数据项的总长度。最大长度为65 535 个字节。
(3)RECORD:为数据记录,每个数据记录只包含一个目标的信息。由FSPSE 字段和多个数据项组成(Data Item)组成。
(4)Data Item:表示数据项,用于数据通信的物理实现,是数据记录中最小的信息单位。
(5)UAP(User Application Profile):是用户应用描述表,本质为某类型下所有数据项的集合。如表1所示,UAP 中包含了ASTERIX CAT10 数据格式所能传输的所有数据项。UAP 为每个数据项设置了索引编号FRN、字段代码和字段描述,并限定了数据项的传输顺序,最后一栏表示数据项的长度,以字节为单位。
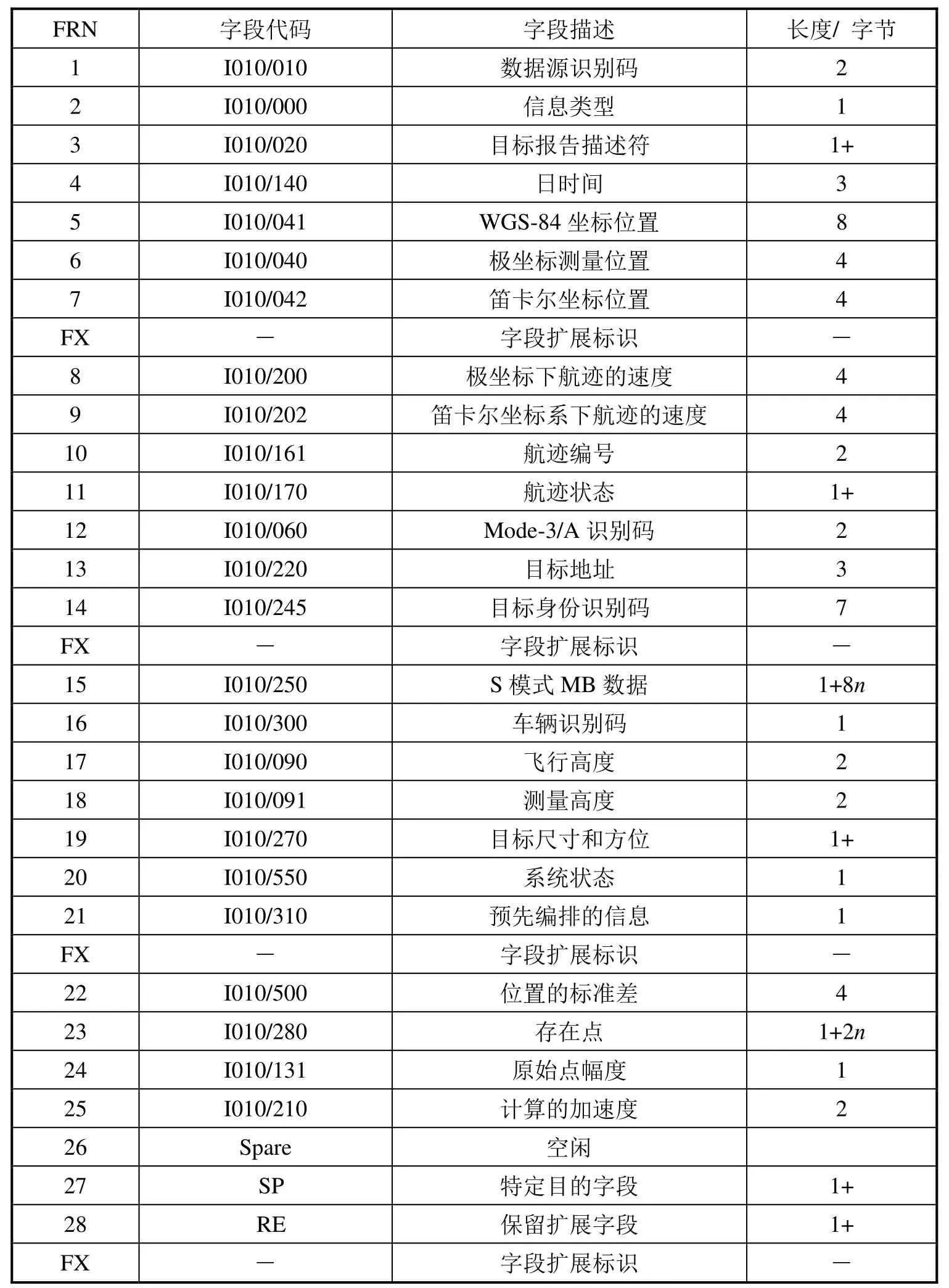
表1 ASTERIX CAT10 标准UAP 表
(6)FSPEC(Field Specification):是数据字段描述。FSPEC 就像一个UAP 表的目录索引,定义了ASTERIX 数据帧传输了UAP 表中哪些数据项。FSPEC 的二进制bit 位从左到右传输顺序依次与UAP 表中的FRN 编号列从上到下一一对应。FSPEC长度可变,至少为1 个字节长度,FSPEC 第一个字节的二进制8 个bit 位按从左到右顺序分别为F1,F2…,F7 和FX。Fi=0,表示不选取对应的数据项(i=1,2,3,…7),Fi=1,选取对应的数据项(i=1,2,3,…7),FX 位是字段扩展位,FX=0 表示扩展结束,FX=1 表示其后有扩展字节,第一个扩展字节的二进制bit 位为F8,F9…,F14 和FX,如果第一个扩展字节的FX=0,则扩展结束。F1,F2…,FX 分别对应这UAP 表中的索引编号FRN(1,2,……,FX)。
3 ASTERIX CAT10 数据格式解析
在ASTERIX CAT10 协议中,数据项是其最基本的组成,下面以ASTERIX CAT10 标准UAP 表中一些常用的数据项为例,来阐述数据项的编码规则和含义。
I010/010:数据源识别码,用于区分系统接收数据的来源,包括SAC(系统区域代码)和SIC(系统识别代码)。SAC 表示的数据来自哪个国家或地区,SIC 表示数据来自哪个厂家的设备(不同厂家的设备分配不同的SIC)。
I010/000:信息类型,取值1:目标报告;2:更新周期的开始;3:定期状态消息;4:事件触发状态消息。I010/020:目标报告描述符,其结构如表2~表4所示。

表2 目标报告描述符表

表3 目标报告描述符扩展字节1

表4 目标报告描述符扩展字节2
bit8-6(TYP,类别):000 二次雷达多点定位系统;001 S 模式多点定位系统;010 ADS-B;011 一次雷达;100 磁环系统;101 高频多点定位;110 未定义;111 其他类型。
bit5(DCR,差分校正):0 无差分校正;1 差分校正。
bit4(CHN,链路):0 链路1;1 链路2。
bit3(GBS,接地位是否设置):0 应答机接地位未设置;1 应答机接地位设置。
bit2(CRT,应答是否损坏):0 多点定位系统无损坏的应答;1 多点定位系统有损坏的应答。
bit1(FX):0 字段结束;1 扩展下一个字节
bit8(SIM,目标是否位仿真):0 实际目标报告;1 仿真目标报告。
bit7(TST,是否为测试目标):0 默认;1 测试目标。
bit6(RAB,报告是否来自目标应答机):0 来自目标应答机的报告;1 来自固定应答机的报告。
bit5-4(LOP,环状态):00 未定义;01 环开始;10 环结束。
bit3-2(TOT,目标性质):00 未定义;01 飞机;10 地面车辆;11 直升机。
bit1(FX):0 字段结束;1 扩展下一个字节。
bit8(SPI,有无特殊位置指示):0 无SPI;1有SPI。
bit1(FX):0 字段结束;1 扩展下一个字节,默认为0,最多可以扩展2 个字节。
I010/140:日时间,表示所报告位置的星历基准时间,以上一个午夜零点起所消逝的时间计算,并以UTC 时间表示,最低有效位为1/128 s。其结构如表5所示。

表5 日时间
I010/041:WGS-84 坐标位置,占用8 个字节,前4 个字节表示纬度,后4 个字节表示经度,单位为180/231°。
I010/040:极坐标测量位置。多点定位系统报文中不常见,在此不作说明。
I010/042:笛卡尔坐标位置,前两个字节为X坐标,后两个字节为Y坐标,单位为1 m,最大值是±32768 m。超出该范围需要在计算值上减去32768 的整数倍。
I010/200:极坐标下航迹的速度。多点定位系统报文中不常见,在此不作说明。
I010/202:笛卡尔坐标系下航迹的速度。多点定位系统报文中不常见,在此不作说明。
I010/161:航迹编号,其结构如表6所示。

表6 航迹编号
I010/170:航迹状态,其结构如表7所示。

表7 航迹状态
bit8(CNF,航迹是否确认):0,已确认的航迹;1,初始状态的航迹。
bit7(TRE,航迹是否最后一次报告):0,默认;1,航迹最后一次报告。
bit6-5(CST,航迹外推状态):00,无外推;01,由于传感器更新周期导致的预测外推;10,在屏蔽区的预测外推;11,由于不可预测的无法检测导致的外推。
bit4(MAH,操纵状态):0,默认;1,水平操纵。
bit3(TCC,航迹跟踪状态):0,传感器层面航迹跟踪;1,斜距校正和采用了投影技术的二位航迹跟踪。
bit2(STH,位置是否平滑):0,测量位置;1,平滑位置。
bit1(FX):0 字段结束;1 扩展下一个字节。
I010/060:目标Mode-3/A 识别码,其编码规则如表8所示。

表8 目标Mode-3/A 识别码
bit16(V,验证):0,码字已验证;1,码字未验证。
bit15(G,错乱):0,默认;1,码字错乱。
bit14(L,码字来源):0,识别码来自应答机的应答;1,上次扫描期间未提取识别码。
bit13:备用为设置位0。
bits12-1:八进制表示的Mode-3/A 识别码。
依此将A4A2A1、B4B2B1、C4C2C1 和D4D2D1转换成八进制数,组成ABCD,即为Mode-3/A 识别码。
I010/220:目标地址,即目标的24 位地址码,其结构如表9所示。I010/245:目标身份识别码,即航班号或注册标志。其编码规则如表10所示。

表9 目标地址
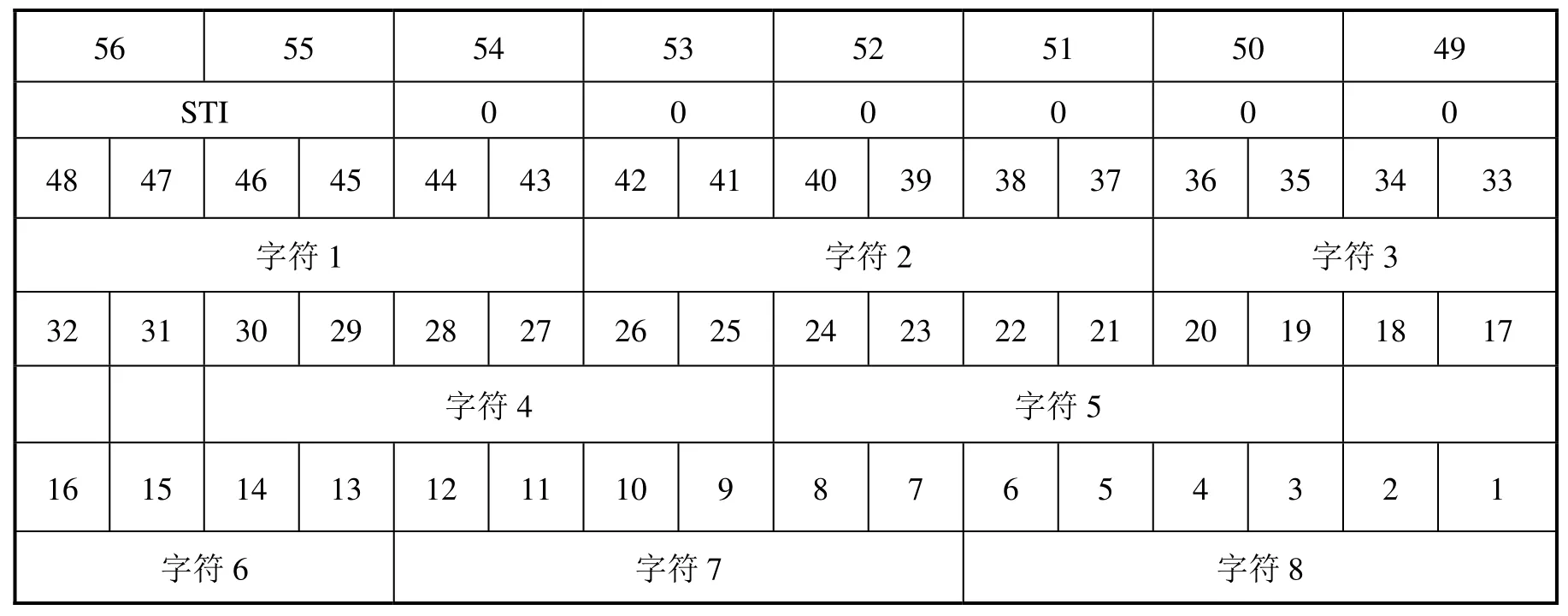
表10 目标身份识别码
bit56-55(STI,目标身份信息来源):00,应答机下发呼号或注册标志;01,应答机不下发呼号;10,应答机不下发注册标志。
获取目标身份识别码的字符1~8 后,可以按照表11对字符进行解码即可得到目标身份识别码。
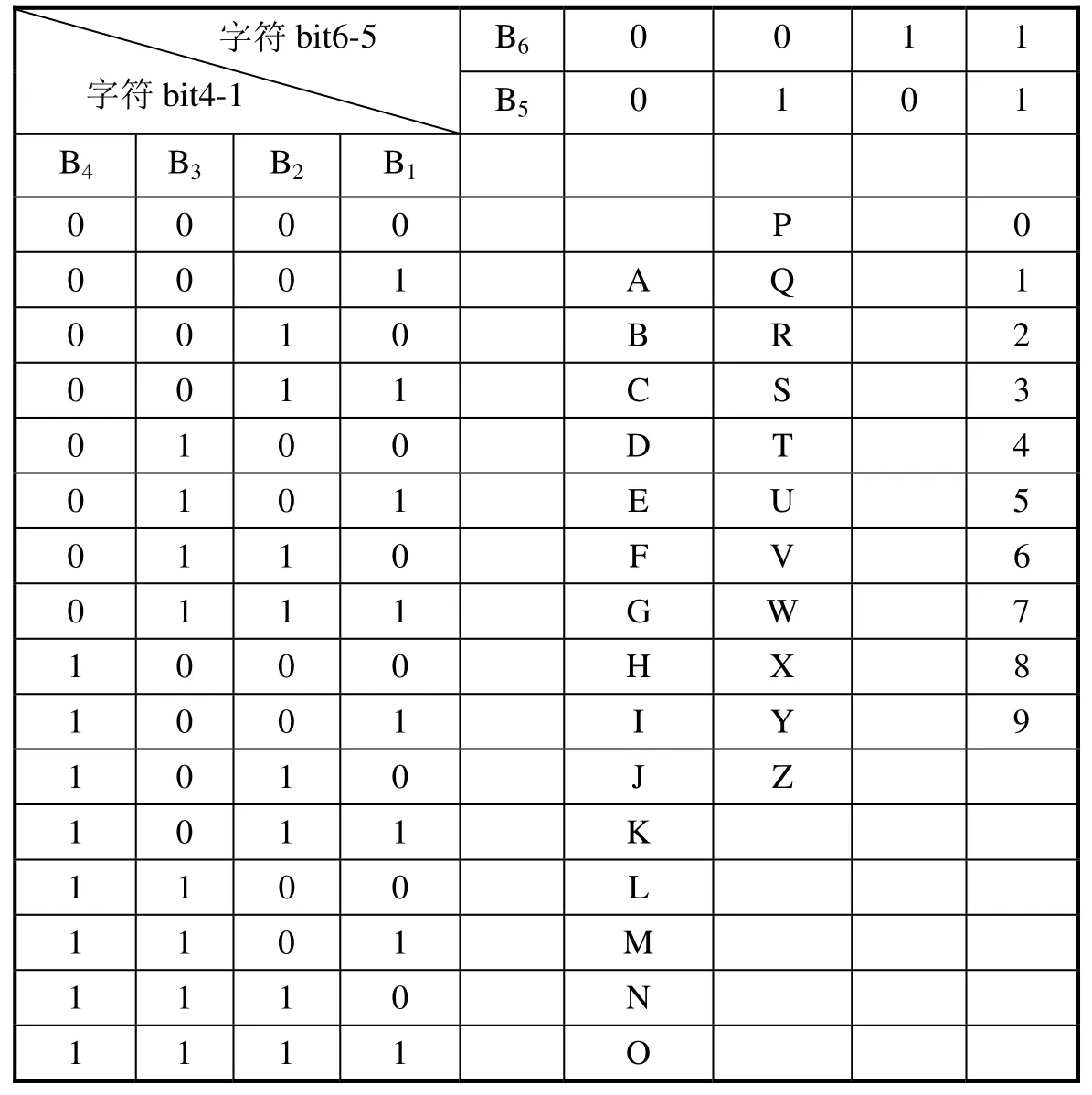
表11 航空器身份识别码编码规则
I010/250:S 模式MB 数据。多点定位系统报文中不常见,在此不作说明。
I010/300:车辆识别码。多点定位系统报文中不常见,在此不作说明。
I010/090:飞行高度,即飞机的气压高度层,最低有效位为1/4 FL 即25 英尺(1 英尺=30.48 cm)。最大值=1 638 400 英尺。
I010/091:飞机的测量高度,通过无线电高度表测得,而非气压高度,最低有效位为6.25 英尺。最大值=±204 800 英尺。
I010/270:目标尺寸和方位。多点定位系统报文中不常见,在此不作说明。
I010/550:系统状态。多点定位系统报文中不常见,在此就不作说明。
I010/310:预先编排的信息。多点定位系统报文中不常见,在此不作说明。
I010/500:位置的标准差,其结构如表12所示。其中X、Y坐标的标准差最低有效位为0.25 m,其协方差的最低有效位为0.25 m2。其最大值分别为63.75 m,16 383.75 m2。

表12 位置的标准差
I010/280:存在点。多点定位系统报文中不常见,在此不作说明。
I010/131:原始点幅度。多点定位系统报文中不常见,在此不作说明。
I010/210:计算的加速度。多点定位系统报文中不常见,在此不作说明。
Spare:空闲。多点定位系统报文中不常见,在此不作说明。
SP:特定目的字段。多点定位系统报文中不常见,在此不作说明。
RE:保留扩展字段。多点定位系统报文中不常见,在此不作说明。
以重庆机场安装建设的多点定位系统输出的ASTERIX CAT10 报文数据为例进行解析,通过网络抓包软件抓取一帧数据:0a 00 33 fb 3f 31 80 16 00 01 25 03 00 42 fd 46 15 21 7c 1c 4b d4 83 35 fa 73 f9 09 06 5b 00 04 00 78 12 23 00 21 80 72 e3 3d e0 00 34 00 02 04 00 ff fc,数据内容为16 进制表示,接下来按字节逐一进行解析,解析流程图如图3所示。
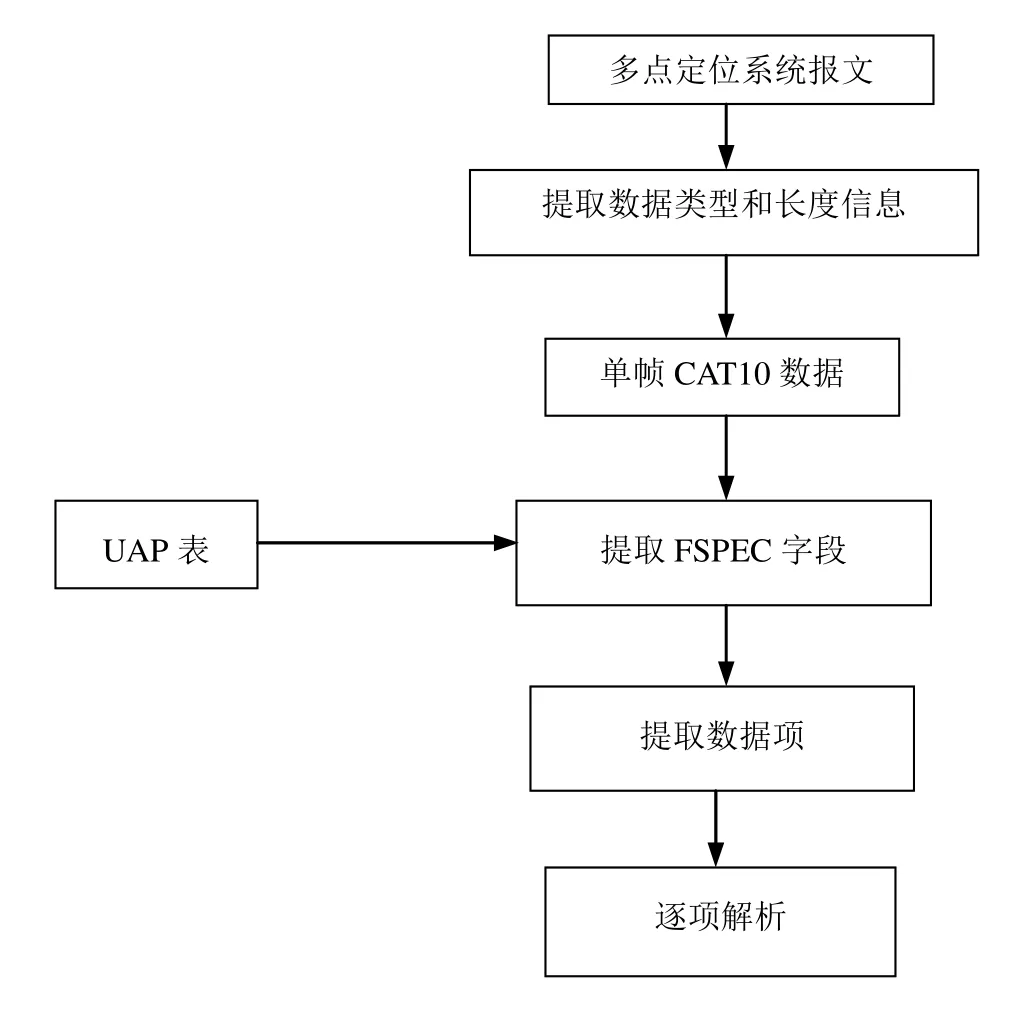
图3 多点定位系统报文解析流程
解析结果如表13所示。至此,我们截取的这一帧多点定位系统输出CAT10 数据报文解析完毕。
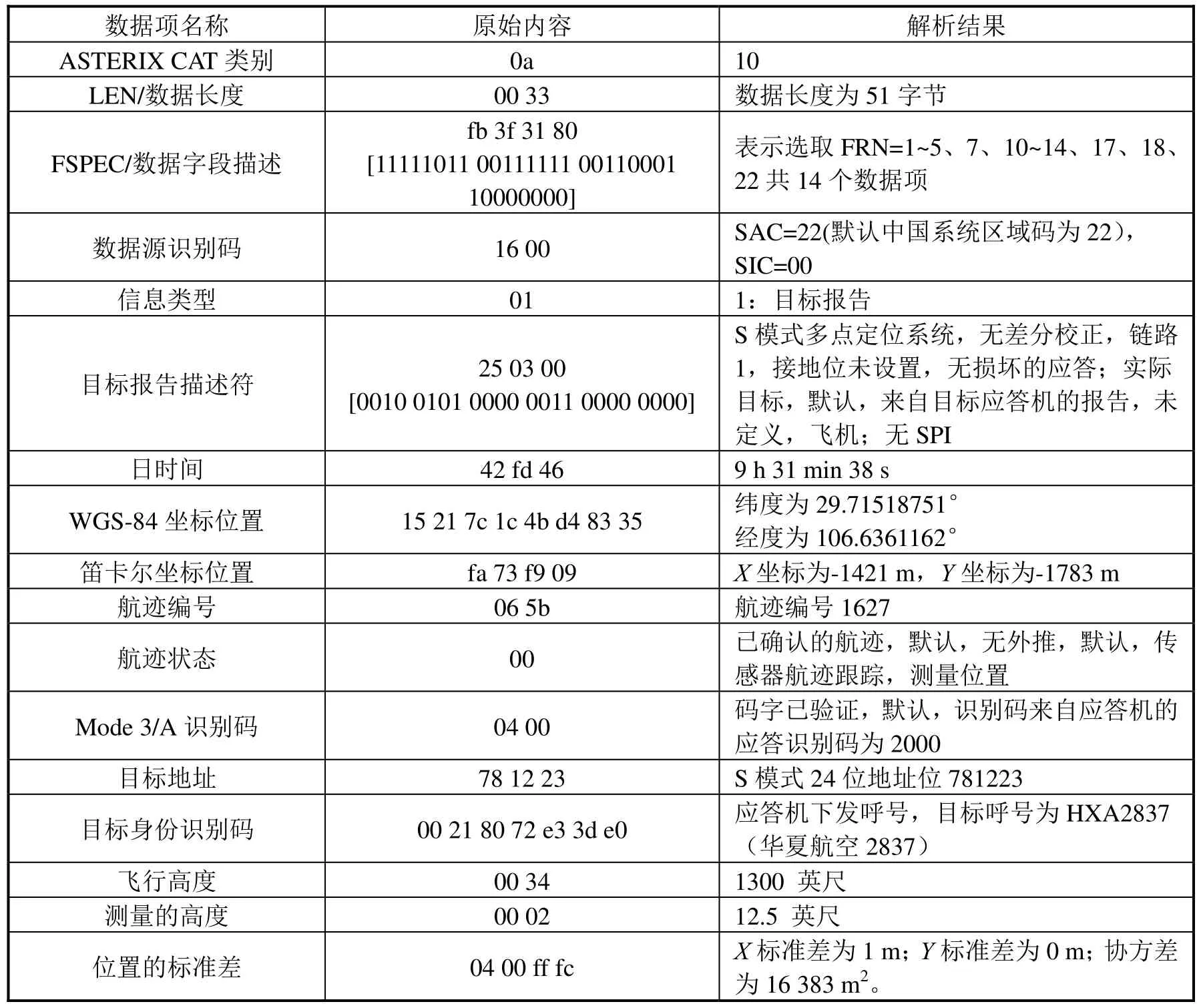
表13 一帧CAT10 数据报文解析实例
4 结语
本文重点讨论了多点定位系统输出报文ASTERIX CAT10 的数据解析方法,并以重庆机场多点定位系统输出的一帧CAT10 数据为例,为大家解析多点定位系统数据起到了借鉴作用。通过对ASTERIX CAT10 报文内容的解析,可以很好地了解 ASTERIX CAT10 报文的基本架构、各数据项的基本内容,以及各个数据是如何封装的,其它类别的ASTERIX 协议监视数据报文也可以通过上述方法进行解析。同时也能对多点定位系统信号质量、工作原理、数据开发等问题进行进一步地探讨,有利于解决空管监视设备保障工作中的相关难题,具有非常实用的价值。
猜你喜欢
计算机与数字工程(2021年6期)2021-06-29
航天器工程(2021年2期)2021-04-28
青年歌声(2019年12期)2019-12-17
计算机与生活(2019年11期)2019-11-12
科技与创新(2019年14期)2019-08-12
百科探秘·航空航天(2018年11期)2018-11-29
北京航空航天大学学报(2017年7期)2017-11-24
电子制作(2017年23期)2017-02-02
北京航空航天大学学报(2016年6期)2016-11-16
遥测遥控(2015年5期)2015-04-23