北斗导航模块抗干扰技术研究
2021-04-15 01:11李健
现代导航 2021年1期
李 健
(中国电子科技集团公司第二十研究所,西安 710068)
0 引言
北斗卫星导航定位系统(BeiDou Navigation Satellite System,BDS)是我国自主研制的有源三维卫星通信系统(Chinese Navigation Satellite System,CNSS),经过多年发展,BDS 已经应用在我国的各项基础建设中。BDS 在军事部署中提供位置、速度等一些关键信息,可以大大提高军事行动的工作效率。在民用方面也有广泛的应用,主要应用于车联网、无人驾驶、无人机等领域。
卫星导航信号容易受到天气状况和城市特定环境的影响,使得导航定位功能经常发生失效而无法定位。在对导航定位系统的研究中,如何避免干扰对导航系统的影响是研究的重中之重,这同样是北斗卫星导航系统的研究重点。因此在北斗定位、北斗抗干扰技术逐渐成熟的情况下,如何融合多种北斗抗干扰技术,实现低成本、小型化和自主可控的北斗抗干扰技术在车联网、无人机、自动驾驶领域的应用,变得越来越迫切。
1 国内外技术现状和发展趋势
1.1 交通领域卫星导航抗干扰技术需求分析
在自动驾驶中,高精度定位导航能够为车辆提供精准定位、障碍物检测与避让、智能车速控制、路线规划和行为决策等各项功能,已经成为了自动驾驶技术不可或缺的关键技术之一。未来交通领域自动驾驶汽车的安全行驶既依靠对周边障碍物的感知,也依赖全球卫星导航系统对车辆在地图上进行厘米级定位,一旦定位错误,会直接导致自动驾驶汽车冲出路面或驶向错误方向,后果不堪设想[1]。“GPS 欺骗”是扰乱自动驾驶汽车定位的一种常见攻击手段,通过对搭载GPS 传感器的终端发送虚假信号的攻击方式在智能手机、无人机、游艇、特斯拉汽车上都曾发生过。调查显示,2016年以来,仅在俄罗斯就发生过9883 起“GPS 欺骗”攻击事件,影响了1311 个民用船只的正常使用[2]。现实中发起这类攻击的技术门槛并不高,攻击者只需拥有一辆自动驾驶汽车和“GPS 欺骗”设备就可实施攻击,市场上一些低端的“GPS 欺骗”设备只需200 多美元。
目前基于自动驾驶的导航技术已有多种组合方式,目前使用最多的是惯导和全球导航卫星系统(Global Navigation Satellite System,GNSS)的结合设计,但无论哪一种导航模式,都需要确保基准点或校准点和卫星导航抗干扰技术的鲁棒性。抗干扰技术可以使导航模块接收到的卫星信号更稳健,从而使导航模块能更精确、更稳定地工作。
1.2 导航抗干扰技术现状
北斗导航系统从军事应用到如今的军民两用,得到了快速发展,也有着更为广泛的应用。但电磁干扰以及恶意的人为干扰现象变得愈加严重。卫星导航系统所受到的干扰类型可以大致分为2 种类型[3]:
(1)欺骗型的干扰方式。这种干扰方式是使用非正式的基站向导航系统发送错误信号,最终导致导航终端的定位产生错误[4]。
(2)压制型的干扰方式。这种干扰方式是使用干扰机发出有干扰性的信号对导航终端进行干扰,使得导航系统无法对正确信号进行科学的处理,接收设备的功能也会受到很大的影响[5]。
当前国内外使用的卫星导航抗干扰技术主要包括以下几种:
(1)时域滤波抗干扰技术。这项技术可以削弱分贝较大的干扰信号,从而能很好地抑制单频、窄带等各种类型的干扰信号。同时,这种技术会对原始信号产生一定影响,最终将会影响信号的接收[6]。
(2)空域滤波抗干扰技术。通过对大量阵元排列,从而将不同的信号分开来降低信号干扰[7]。
(3)空时自适应滤波抗干扰技术。该项技术能够抑制二维空间内的干扰信号,这大大弥补了空域滤波抗干扰技术的缺陷[8]。
2 抗干扰导航算法的设计与实现
2.1 导航模块的抗干扰分析
在北斗小型化导航模块的抗干扰技术中,对信号的干扰抑制主要从干扰信号的特性比如时间、频率等方面入手,可以将抗干扰技术分成以下几种类型:
(1)自适应阵类:光束控制,空时联合处理,零控制等;
(2)多孔技术类:多元对消,法光束转换;
(3)单孔技术类:时相滤波,窄辅助跟踪环,极化抗干扰技术,窄前后滤波器,GPS/惯性集成和辅助[9]。
通过分析信息干扰类型,我们可以发现强窄带干扰有着最好的效果。所以,针对强窄带干扰设计了级联式抗干扰算法的第一级。第一级应用频域干扰抑制结合了N-σ消除策略的方法,这种方法减轻了强窄带干扰,提高通信质量。第二级是空时联合处理算法,干扰信号可以通过空时二维最优处理进行消除,最终得到很好的干扰抑制的效果。但这种方法的运算量很大,主要是对协方差矩阵和动态自适应权重的计算。
2.2 频域干扰抑制算法
如图1所示,使用频域干扰抑制对采集的原始数字信号重叠加窗,然后将处理后信号进行快速傅立叶变换(Fast Fourier Transformation,FFT)处理得到频域信号。将背景噪声功率作为判别标准,干扰信号定义为大于该标准的分量,通过进行频域处理来减少窄带干扰,然后使用反向傅立叶变换(Invert Fast Fourier Transformation,IFFT)恢复时域信号。
首先,输入信号为x(n) =s(n) +j(n),其中s(n)(GNSS+加性高斯白噪声(Additive White Gaussian Nosie,AWGN))为需要的信号,j(n)为不需要的干扰。离散傅立叶变换(Discrete Fourier Transform,DFT)在第k点的结果为:
DFT 能分辨N个不同频率点(fk= 2πk/N)的能量。如果单音干扰频率与N个频率点不一致,就会造成频率弥散:

如图2所示,虚线上面表示的是单音干扰通过DFT 的频率弥散。

图2 单音的频率弥散图
通过加窗的方式,我们提出一种基于离散傅立叶变换的频域陷波方法来避免上述问题。如图3所示为加窗法流程图。加窗能避免频谱能量泄漏,使频点连接变得平滑。

图3 加窗法
加窗后的DFT 的输出为:
由于DFT 输出的频谱能量与窗函数有关,我们可以选择低旁瓣的窗函数来减少低频谱能量的泄露。但是,较低旁瓣往往会有较宽的主瓣,这需要我们对两者进行平衡。在GNSS 信号接收过程,我们通过降低CW 单音的频率扩展来降低频率点数目。当不存在信号干扰时,这种方式能够避免信号衰减。如式(4)所示为信噪比的衰减:
通过使用50%的重叠能够减少信噪比的衰减,采用两路相互间隔N/2 个采样点同步处理。如图4所示,经过IFFT 的处理我们取处理结果中间的N/2个值,然后将两路整合到一起。 对于Blackman-Harris 窗而言,通过上述过程,可以大大降低信噪比的损失。

图4 两路逆FFT 合并框图
针对上面的分析,我们提出了一种N-σ干扰消除策略来滤除窄带干扰。N-σ策略是一种动态自适应消除策略,它可以在保持其它的频率分量不变的同时来清除窄带干扰。信号干扰会破坏原始频谱分布,未干扰的部分会保持高斯特性,最终能够对影响的部分进行区分。
如图5所示为N-σ策略原理图。通过该策略我们可以得到每个频率的标准差(σcalc)以及均值(μcalc),然后通过对比σcalc和四个量化级别(σ10、σ11、σ12、σ13)得到门限阈值比例因子N,计算门限为:

当σcalc较大时表示存在干扰,这时N选较小的值。选定门限以后,为了能够在保持抗干扰的同时保持信号特性,我们将高于门限的频率设为0。
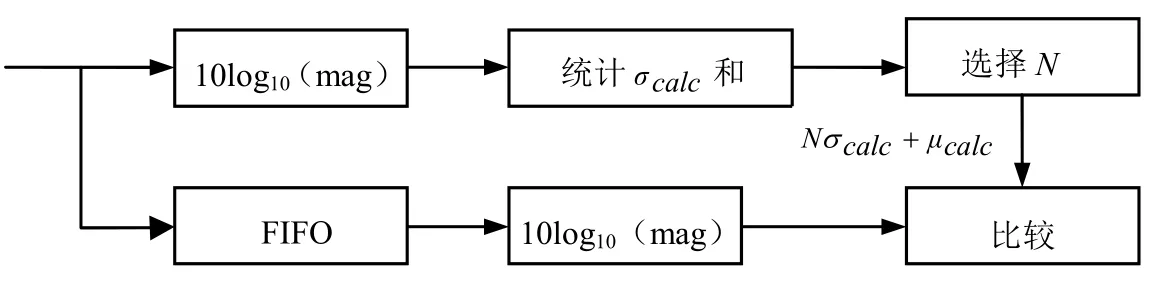
图5 N-σ 策略原理框图
2.3 算法性能仿真
为了验证上述算法的性能,我们对其进行了仿真。首先输入强窄带干扰,仿真干扰的天线强度是-70 dBm,频率是正对信号中心频率的单音干扰,如图6所示为窄带抑制滤波器的信号频谱。
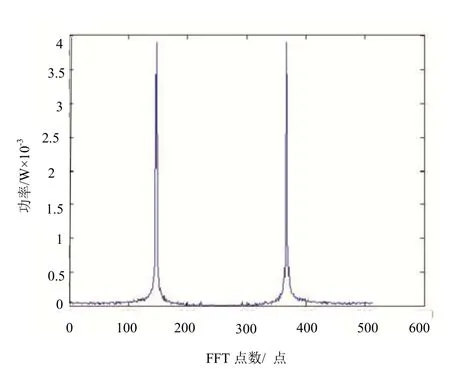
图6 强窄带干扰输入信号的频谱图
根据N-σ策略,窄带抑制滤波器将门限高的频谱全部归0,最终的频谱如图7所示,此时,窄带干扰基本可以清除。

图7 窄带干扰抑制后的频谱图
3 结论
本文首先对当前北斗导航抗干扰技术的背景需求以及国内外研究现状进行分析,通过充分融合北斗和惯导技术,设计了小型化导航模块,从而完成了样机的抗干扰算法设计。通过仿真模拟试验,验证样机的性能。随着技术的不断成熟与完善,该方法有望在车联网或车辆自动驾驶场景中广泛使用。
猜你喜欢
计算技术与自动化(2022年2期)2022-07-04
海军航空大学学报(2021年1期)2021-09-01
成都信息工程大学学报(2021年1期)2021-07-22
通信电源技术(2020年22期)2020-03-27
山东冶金(2019年1期)2019-03-30
雷达学报(2018年3期)2018-07-18
北京航空航天大学学报(2017年3期)2017-11-23
电子制作(2017年20期)2017-04-26
电子制作(2017年19期)2017-02-02
火控雷达技术(2016年1期)2016-02-06