GNSS系统驯服铷钟基准研究
2021-04-15 01:11:40赵学军
现代导航 2021年1期
赵学军
(中国人民解放军92678 部队,天津 300220)
0 引言
众所周知,铯原子钟是重要的战略资源,美国政府对我国实行禁运和限购政策。国产铯钟研制起步较晚,虽有个别产品型号,但离规模商品化应用还有一段距离[1]。加之铯钟价格昂贵,因此如何利用GNSS 系统驯服铷钟,满足时统系统高精度时频需求,或者应急备份需求,成为当前有意义的研究课题[2]。
1 卫星驯服铷钟原理
铷钟工作时,频率不稳,容易向某一方向漂移。驯服铷钟时,就是利用与卫星导航接收机输出的秒信号进行比较,计算两者频率偏差,然后对铷钟频率进行修正,使铷原子钟的频率准确度和长期稳定度得到一定的控制和提升[3]。原理框图如图1所示。
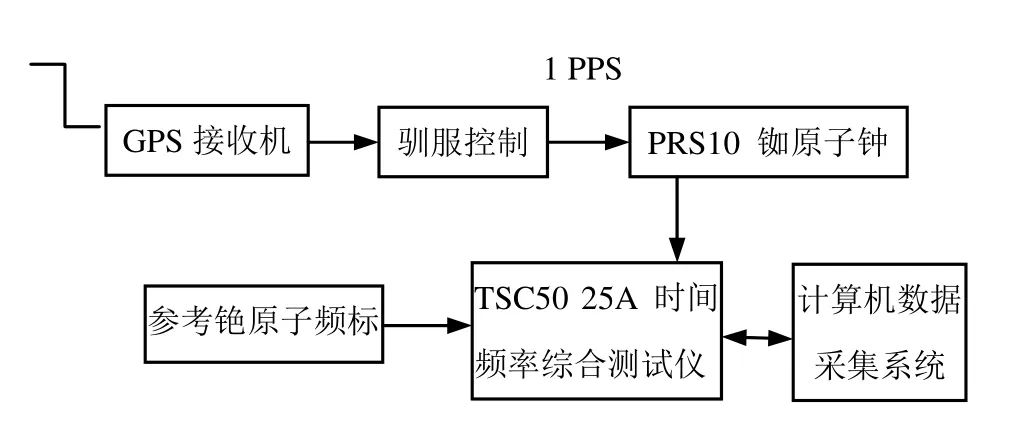
图1 GPS 驯服铷钟原理框图
2 卫星驯服铷钟试验
2.1 铷原子钟性能选择
通过对多款铷原子钟的性能指标进行测试,其铷原子钟的阿伦方差如图2所示。由图可见HP5065A 铷原子钟阿伦方差指标最好,PRS10 次之。
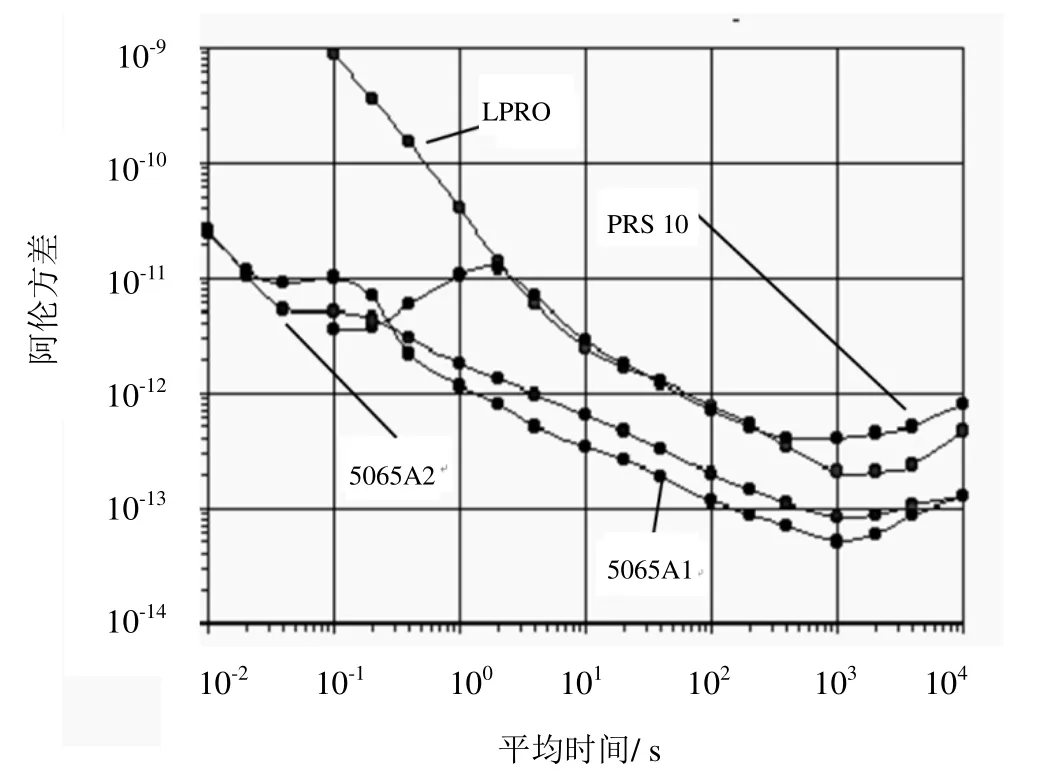
图2 铷原子钟的阿伦方差
多款铷原子钟的相位噪声指标测试如图3所示。由图可见HP5065A 铷原子钟相位噪声指标最好,PRS10 次之。

图3 铷原子钟的相位噪声
由于HP5065铷钟价格较贵,市场应用也较少,PRS10铷钟相对价格便宜,市场应用较多,故选择PRS10铷钟试验。
2.2 GPS 驯服铷钟试验单元组成
GPS 驯服铷钟试验主要采用U-BLOX M8T GPS接收机对PRS10型铷原子钟进行驯服试验,试验框图如图4所示。
由图4可见,主要测试设备包括:U-BLOX GPS接收机、驯服控制电路、PRS10 铷原子钟、TSC5120A 时间频率综合分析仪、计算机数据采集系统和5071A 铯原子钟。
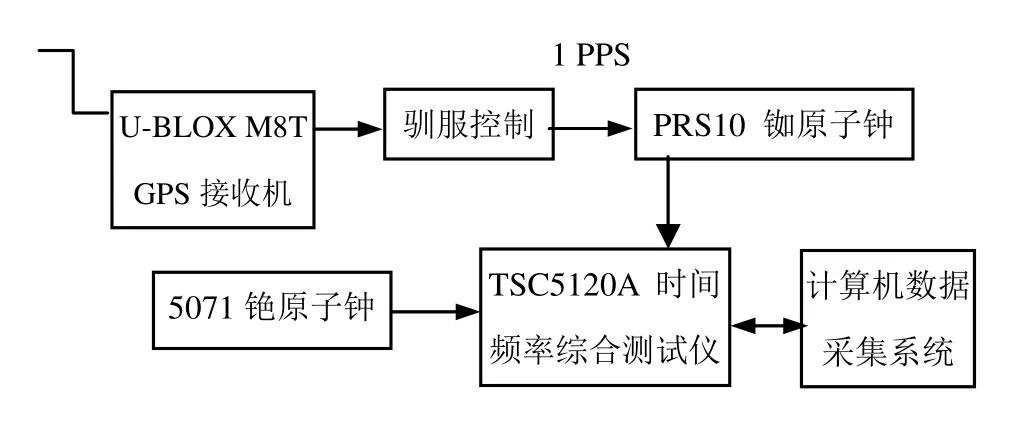
图4 GPS 驯服PRS10 铷钟试验框图
2.3 GPS 驯服铷钟试验结果
利用U-BLOX M8T GPS接收机对PRS10型铷原子钟进行驯服24 h后,得到了测试结果。
2.3.1 频率稳定度(阿伦方差)测试
驯服PRS10 铷原子钟频率稳定度(阿伦方差)曲线如图5所示。
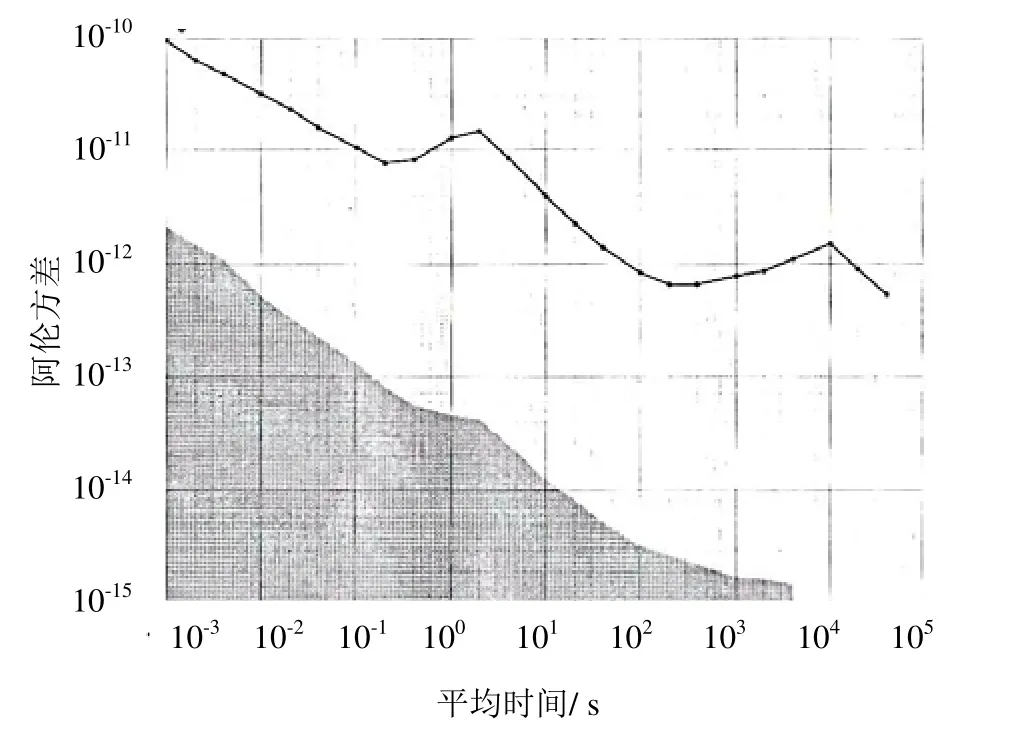
图5 驯服PRS10 铷原子钟频率稳定度(阿伦方差)曲线
2.3.2 相位噪声测试
驯服PRS10 铷原子钟相位噪声如图6所示。

图6 驯服PRS10 相位噪声
经过试验,PRS10铷钟的长期频率稳定度曲线拐头向下向好,克服了向上漂移的现象,达到了驯服效果。为进一步提高驯服铷钟性能,如提高驯服铷钟的短期稳定度和远端相位噪声等指标,可以进一步做性能提高试验。
2.4 GPS 驯服铷钟性能提高试验
为了提升驯服铷钟的短期稳定度和相位噪声指标,采用驯服铷钟锁高稳低相噪晶振的方法进行试验,试验框图如图7所示。
由图7可见,主要测试设备包括:U-BLOX GPS接收机、驯服控制电路、PRS10 铷原子钟、高稳低噪晶振,TSC5120A 时间频率综合分析仪、计算机数据采集系统和5071A 铯原子钟。

图7 卫星驯服铷钟锁高稳低相噪晶振框图
经过数天的连续测试,得到了驯服铷钟锁高稳低相噪晶振的频率稳定度、相位噪声测试结果。
2.4.1 频率稳定度(阿伦方差)测试
驯服PRS10 铷原子钟锁高稳低相噪石英晶体振荡器频率稳定度(阿伦方差)曲线如图8所示。

图8 驯服PRS10 锁高稳低相噪晶振频率稳定度(阿伦方差)曲线
2.4.2 相位噪声测试
驯服PRS10 铷原子钟锁高稳低相噪晶振相位噪声如图9所示。

图9 驯服PRS10 铷原子钟锁高稳低相噪晶振相位噪声
经过试验,改进前与改进后对比,PRS10铷钟的长期频率稳定度曲线更加平滑,短期频率稳定度曲线拉低向好,远端相位噪声抑制了近30 dBc/Hz以上,达到了试验的预期效果。
3 试验结果评价与分析
卫星驯服铷原子钟与铯原子钟阿伦方差如表1所示,SBB 相位噪声如表2所示。
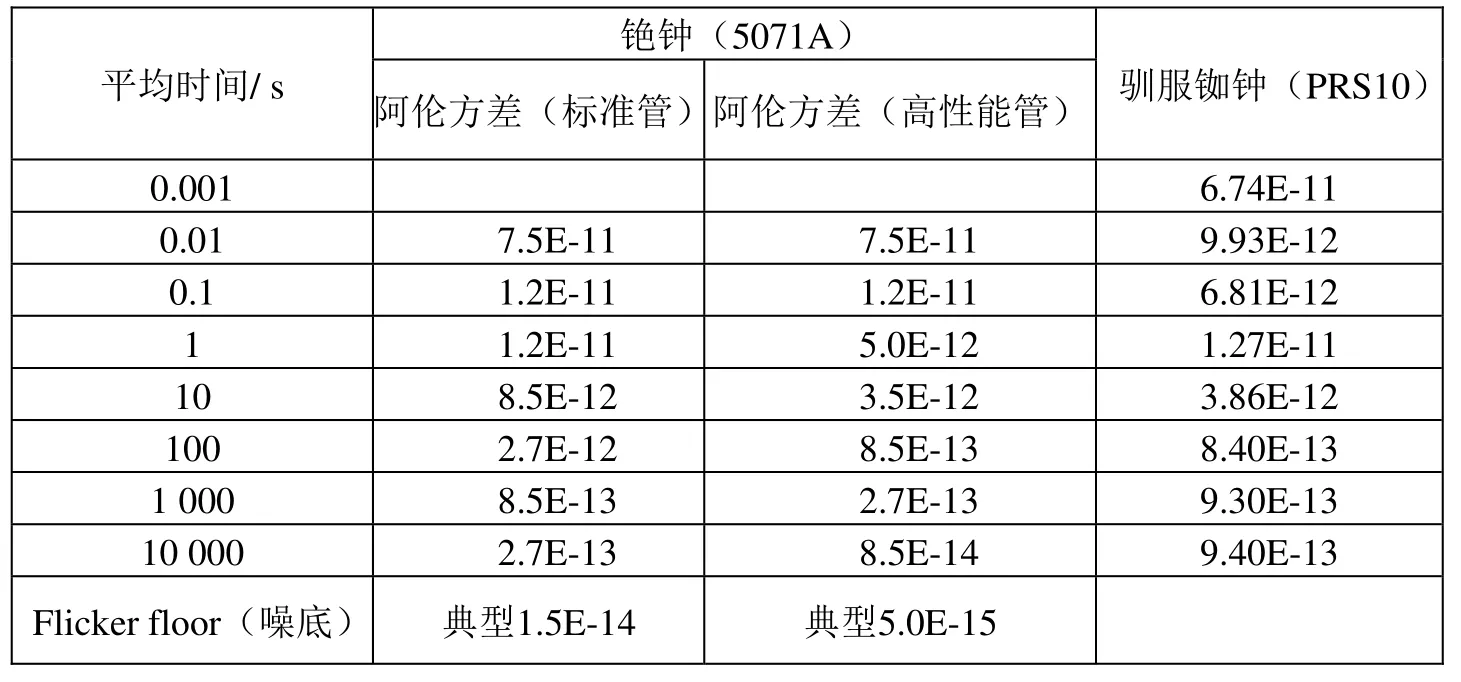
表1 卫星驯服铷原子钟与铯原子钟阿伦方差
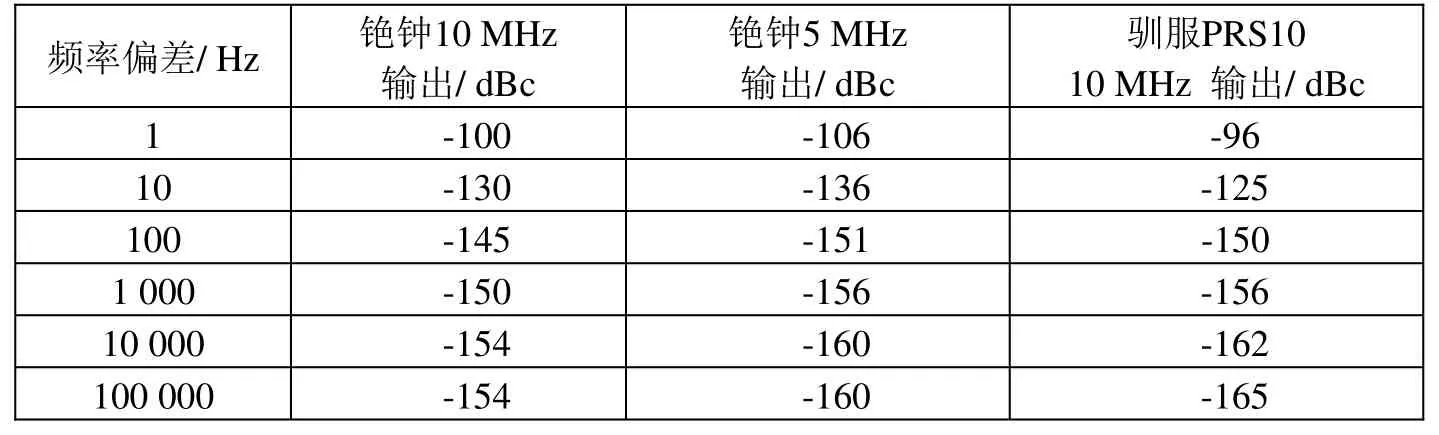
表2 卫星驯服铷原子钟与铯原子钟SSB 相位噪声
通过对试验结果的统计处理,并与铯原子钟技术指标进行比对,改进型的GPS驯服铷钟性能接近铯原子钟指标。但还存在一些问题,如GPS驯服铷原子钟锁高稳低相噪石英晶振在1 Hz以下相噪较差,其主要原因是采用的高稳低相噪石英晶振的1 Hz以下相噪较差,如果选用OSA8607高稳低相噪石英晶振或RAKON公司 HSO13、HSO14,其1 Hz以下相噪将会得到巨大的提升。同时科学构建驯服控制算法,例如Kalman算法和Hondak算法,可实现既兼顾短稳,又兼顾长稳和相噪。再参照国际上相关时间频率基准实验室如美国NIST、法国OP等实验室所做的工作,在实现可靠溯源的情况下,驯服铷钟的频率准确度和长期稳定度将会更好。
猜你喜欢
雪豆月读·中年级(2022年6期)2022-05-30 10:48:04
辽宁科技学院学报(2021年3期)2021-07-01 07:33:16
时间频率学报(2021年1期)2021-04-26 12:34:34
娃娃乐园·综合智能(2020年10期)2020-11-10 07:19:38
中学生数理化·八年级物理人教版(2019年9期)2019-11-25 07:33:06
动漫星空(2018年5期)2018-10-26 01:14:48
电子测试(2018年14期)2018-09-26 06:04:14
小哥白尼(军事科学)(2018年8期)2018-09-12 02:07:52
电子测试(2018年11期)2018-06-26 05:56:12
电子测试(2018年1期)2018-04-18 11:52:05