考虑车辆协同与时间延迟的跟驰模型的弱非线性分析
2021-04-15 03:48黄宇达赵红专王迤冉
计算机应用与软件 2021年4期
黄宇达 赵红专 王迤冉
1(周口职业技术学院信息工程学院 河南 周口 466000)2(桂林电子科技大学建筑与交通工程学院 广西 桂林 541000)3(周口师范学院网络工程学院 河南 周口 466000)
0 引 言
近年来,合作交通系统受到广泛研究。车辆通过包括V2I和V2V在内的V2X通信与其他车辆或路边单元交换信息,通信的车辆与不通信的传统车辆相比,可能表现出复杂的协作动态行为。本文提出了基于交通控制和交通流理论下的V2V通信合作交通系统。通过交通控制策略与车路协同相结合研究合作交通系统成为主要趋势。协同自适应巡航控制[1-5](Cooperative adaptive cruise control,CACC)和增益调度技术[6]相结合体现了交通系统中的一个主要线路与开发交通控制策略有主要联系。面对交通中的各种问题,国内外研究学者主要从交通流理论方面展开研究,例如:跟驰模型[11]、格子流体动力学模型[12-15]和宏观交通流模型[9-17],但是很少从交通流的复杂协同动态问题进行研究。
稳定性是影响交通流特性的关键因素之一,交通流特性主要表现为小扰动下的稳态[9-15]。引起交通波的交通流不稳定性是由于刺激加速度或使速度适应实际交通条件的延迟造成的[15-18]。这些延迟不仅是有限加速和制动能力的结果,也是驾驶员的有限反应时间造成的[20-21]。如果交通密度足够高且超过临界值,则延迟会导致密度和速度扰动的正反馈并造成虚拟拥堵。揭示交通流中存在各种复杂的延迟不稳定机制是十分重要的。自1961年研究时间连续模型的延迟问题开始,跟驰模型得到了广泛应用,并且比经典的模型更复杂。文献[18]提出了考虑驾驶员反应时间的跟驰模型,揭示了遇到较慢车辆引起的车速振荡。文献[19]提出了具有时间延迟的最优速度(OV)模型,并重新发现了丰富的动力学行为。文献[20]研究了具有延迟的跟驰模型的局部和全局分岔,并分析了交通状态的不同周期分岔。文献[21]系统地研究了微观交通模型中的延迟、不准确和预期。文献[22]研究了交通流量不稳定的两个原因:驾驶员的有限反应时间引起的延迟和有限的发动机性能引起的时滞。文献[23]提到一些研究人员专注于感知车头时距和速度的延迟,然后分析其对交通拥堵的影响。上述文献从不同角度研究了延迟对交通流演化的影响。
合作是指在交通流中驾驶员通过V2V系统提供的多方信息对前后多辆车响应的驾驶行为。合作增加了交通流的稳定域,并有助于稳定扰动的演变[24-27]。这些干线沿线协同跟随系统的研究与稳定交通流有着直接的联系。普遍采用的方法是线性稳定性分析,它提供了稳态的小扰动随时间增长的条件。对于非线性效应,非线性方程属于特定类型的偏微分方程,通过逆散射变换可得到扭结波、孤子波、反扭结波和三角波等精确解[28]。文献[29]首先介绍了推导KdV方程以研究交通流量的想法。基于OV模型及其扩展模型,众多学者对交通流的各种特性进行了研究。一般而言,目前大多数理论研究都没有充分考虑合作和不同延迟的综合影响。为了促进交通流理论的发展,本文尝试推导出反映广义力跟驰模型合作与延迟综合作用的分析条件:1) 提出了时间延迟和考虑协作的广义力跟驰模型;2) 导出了Burgers方程和KdV方程,且得到了它们的孤立解;3) 通过仿真分析了合作和延迟的综合影响。
1 模 型
车辆利用无线通信网络(DSRC、Wi-Fi、4G、5G)可以从前方或后方的多个车辆中获取更多信息,如图1所示。每辆车基于其前车和在预定范围内的车辆改变其加速度或速度,其通信范围如图1(b)所示。对于缺乏通信而导致的传统车辆跟驰模型,每辆车仅基于图1(a)所示的根据前车行驶状态而改变其加速度或速度。单车辆的动态可以通过跟驰模型等微观交通流模型来描述。一般来说,驾驶员在时间连续跟驰模型中的响应直接由加速度函数an(t)表示,而an(t)由间隔Δxn(t)、相邻车辆的速度差Δvn(t)、司机的速度vn(t)表示。因此,反应合作跟驰模型的交通动力学方程为:
(1)
式中:xn和vn是车辆n的位置和速度;Δxn,j(t)和Δvn,j(t)是车辆空间车头时距和相邻车辆j的相对速度;N1(t)和N2(t)表示通信拓扑;Γ1和Γ2为相应的控制策略。

(a) 传统的跟车系统
考虑到多个时间延迟因素,综合信息与加权系数表示车辆n的加速度方程为:

(2)
式中:k′和k是车辆通信半径数;k′+k是车辆通信范围内的车辆编号;τ1、τ2、τ3表示对不同刺激的反应延迟;φj和ψj表示合作关系的加权系数。

(3)
式中:N+={n+j|j=1,2,…,k}与N-={n-j|j=1,2,…,k′}分别是考虑前后运动的车辆集合;β的取值范围为0≤β≤1,一般取β=0.5。
假设合作关系的加权系数是相同的,即φj=ψj。φj定义如下:
(4)
2 线性稳定性分析
通过引入扰动来确定交通流在稳态附近的演化过程。均匀流量与速度和车头时距无关,一般关系式为:
(5)
当合作跟车系统达到平衡状态时,式(2)满足:
(6)
(7)
平衡状态下的小扰动方程为:
(8)
un(t)的关系介绍如下:
(9)

f(·)的公式由平衡状态附近的二阶泰勒展开式得到:
(10)
式中:J和H分别是雅可比矩阵和黑塞矩阵。
其中偏导数:
(11)
根据文献[8]可知偏导数应满足:f1,n<0,f2,n>0,f3,n>0。

根据式(2)和式(10)可得:
(12)
线性化的目的是保持方程的一阶项,于是得到:
(13)
扰动改写成Fourier模式下的方程为:
Δyn(t)=Amexp(iαn+zt)
(14)
式中:α是波数值;Am是傅里叶级数的振幅。
从式(13)获得z的等式为:
(15)
式中:z=z1(ik)+z2(ik)2+z3(ik)3+…。将其代入式(15),收集(iα)的一阶项和二阶项:
(16)
当z2为负时,对于长波模式,均匀稳态变得不稳定;如果z2为正,则均匀稳态变得稳定。因此,对于波长长的小扰动,均匀的交通流是稳定的。
(17)
稳定性依据判定式(17)表明,合作模式对交通流的稳定起着积极作用,而延误则对交通流的稳定造成负面影响。根据式(17),可证明与相对速度相关的时滞对线性稳定判据没有作用。
对于具有时滞的协同最优速度(OV)模型,给出其数学动力学方程:
(18)
式中:κ和λ分别是驱动器灵敏度和增益系数;V(·)是最佳速度函数,取决于车头时距Δxn。根据实验数据对最佳速度函数进行了标定[30]:
V(Δx)=V1+V2tanh[C1(Δx-lc)-C2]
(19)
式中:V1=6.75 m/s,V2=7.91 m/s,C1=0.13 veh-1,C2=1.57 veh-1,车辆长度lc=5 m。此外,令参数κ=0.8,λ=0.5。
对于上述扩展的OV模型,由式(11)可以得到:
f1,n=-κ
f2,n=κV′
f3,n=λ
(20)

如果τ1=0,τ2=0,稳定性条件为[7]:
(21)
如果τ1=0,τ2≠0,稳定性条件为[26]:
(22)
如果τ1≠0,τ2≠0,j=1,稳定性条件为[22]:

(23)
如果τ1≠0,τ2≠0,稳定性条件为[8,12]:
(24)
如图2所示,其中(a)、(b)、(c)、(d)四幅子图的无时滞非对称效应权重分别是β=0.5、β=0.7、β=0.5、β=0.7,图2(a)、(b)未考虑时间延迟因素影响,图2(c)、(d)考虑了反应延迟τ1、τ2。比较图2(a)和(b)可知合作行为有助于稳定交通流量,这与近期一些微观模型和宏观模型的研究结果一致。同时,不对称效应的权重影响了交通流的稳定性。图2(c)和(d)表明延误导致交通不稳定,而合作效应可以稳定交通流。如式(24)和图2(c)和(d)所示,根据分析和数值结果,延迟和合作是模型依赖的。弦稳定性对于表征干扰衰减特别有用。此外,车辆链将传播足够的增长以触发非线性效应,如孤立波。

(a) β=0.5
3 非线性分析
导出非线性方程的想法首先被引入OV模型[29],它是由数学家和物理学家在后来的研究中开发的。将这些发展概括为一类合作汽车跟随模型。将在弱非线性区域中研究Burgers方程和KdV方程,并推导出一些关系。
从式(12)开始,设定:
(25)
(26)
(27)

(28)
因此,得到:
(29)

3.1 Burgers方程及其解
从粗粒化的尺度来考虑交通流的波是长波型。通过使用还原微扰法,由式(12)推导出稳定区域内的Burgers方程。引入了多个变量:空间变量n和时间变量t,以及慢变量X和T。
X=ε(n+bt)T=ε2t0<ε≪1
(30)
式中:b是待定系数,扰动设定为:
Δyn(t)=εR(X,T)
(31)
根据式(30)和式(31),得到以时间求导,车辆从当前位置的位移和延迟的泰勒展开式:
(32)
R(t-τ)=R+(-bτε∂X-τε2∂T)R
将式(25)-式(26)和式(30)-式(32)代入式(12)并扩展到ε的三阶项,由此得到非线性偏微分方程为:
(33)
令d1=0,在式(33)中消除ε的二阶项,得到以下偏微分方程:
(34)
式(34)即为Burgers方程,将在以下案例研究中进行分析。对于扩展的OV模型,结合方程可知,当V″<0时,系数d3在稳定区域中为负,并且满足稳定性条件。Burgers方程的解为:
(35)

3.2 KdV方程及其解
本节推导了描述中性稳定附近孤子波的KdV方程,采用非线性分析方法,研究了临界点附近的缓慢变化行为。为了使用空间变量n和时间变量t提取慢速标度,定义慢速变量X和T为:
X=ε(n+bt)T=ε3t0<ε≪1
(36)
式中:b是待定系数。扰动设定为:
Δyn(t)=ε2R(X,T)
(37)
根据式(36)和式(37),对时间求导,车辆从当前位置的位移和延迟的泰勒展开式三个方程为:

(38)
(39)
R(t-τ)=R+(-bτε∂X-τε3∂T)R
(40)
将式(25)、式(26)和式(36)、式(37)、式(40)代入式(12),将其扩展到ε的第六阶,得到如下非线性偏微分方程:
(41)
式中:g3=(bf1+f2)。令g3=0,即b=-f2/f1。
线性稳定性依据式(17)定义了与中性稳定性的紧密关系,因此括号内的g4项等于ε2,那么g4项的阶数为ε6,可以忽略。
对于O(ε)项分两种情况进行阐述。
(1) 考虑五阶项,忽略O(ε)项。得到的KdV方程为:
(42)
为了得到具有更高阶校正的标准KdV方程,在式(42)中进行以下变换:
(43)
(44)
(2) 考虑O(ε)校正。假设:
(45)
式(37)的微扰项给出了从KdV孤子连续族中选择唯一成员的条件:
(46)
式中:A是一个自由参数,是KdV方程的孤子解的振幅。为了获得A的值,可解性条件是:
(47)

(48)
通过积分得到振幅[8]:
根据式(37)可以得到扰动的表达式为:
(49)

根据不同延迟下具有小扰动的交通流的演化,找到了中性稳定附近的孤子波。对于合作OV模型,根据式(20)得到高阶修正项的KdV方程为:
(50)
振幅A的值为:
(51)
根据式(34),得出扰动的表达式为:
(52)

4 仿真实验
为了验证理论分析的结果,假设由扩展的OV模型呈现的所有车辆在周期性边界条件下移动。实验场景如图3所示,有N=100辆车行驶在长度L=1 500 m的环形道路上,所有车辆的初始额定速度为V(L/N),车头时距恒定,为L/N。采用式(19)作为OV函数。考虑车辆为k=k′=3,非对称性权重为β=0.7,其他参数与上述扩展OV模型相同。
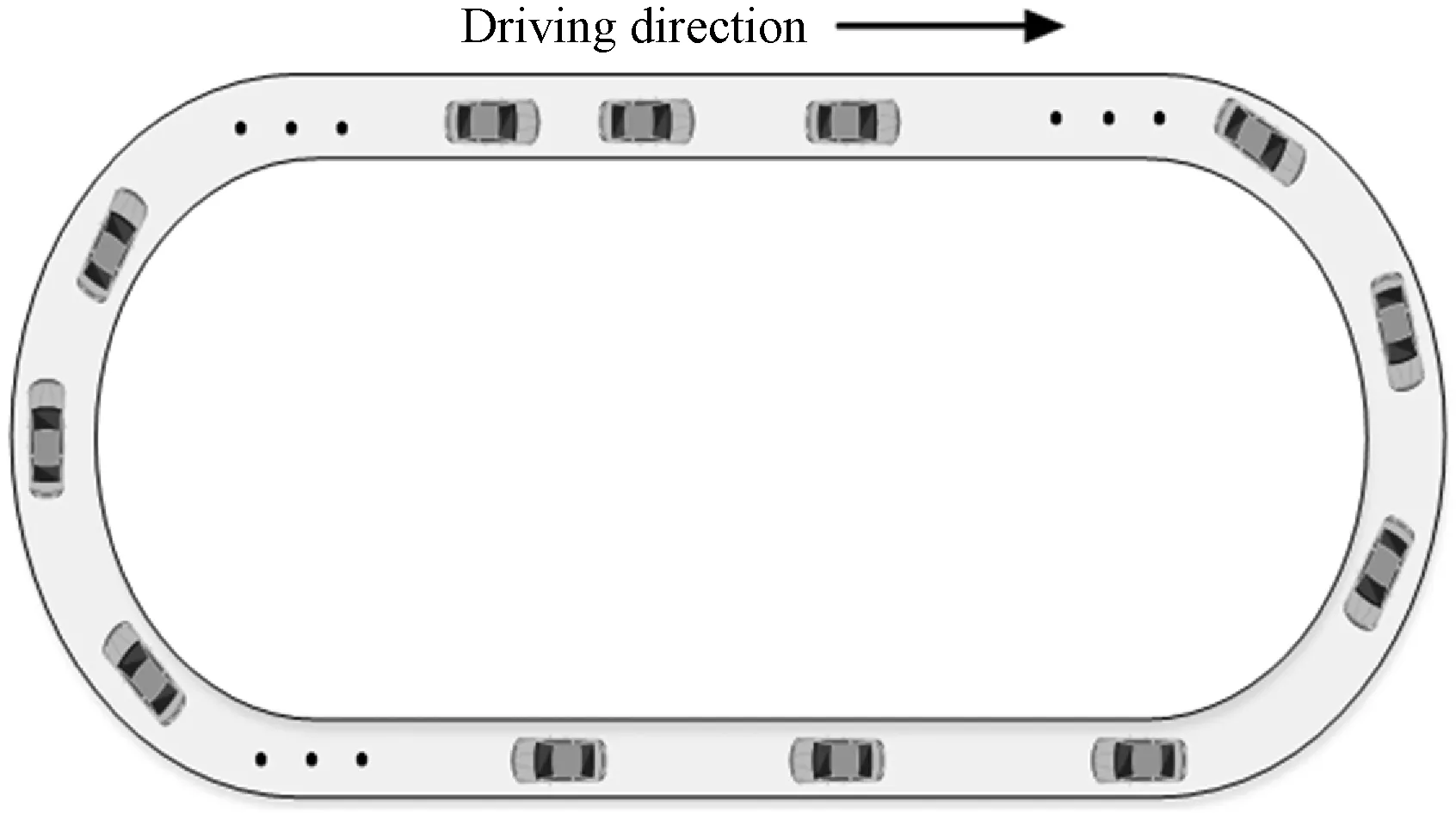
图3 环路图
假设初始扰动为:
(53)
将上述参数值代入稳定性判断函数式(24),函数值显示初始扰动是稳定的。图4和图5分别展示了t=4 000 s时交通波的时间演变和相应的车头时距分布。可以看到在τ1恒定不变、τ2不同的情况下,车头时距经过足够长的时间后的时空演化规律。根据式(24),当τ1=0.2、τ2=0.1时,交通流量是稳定的,因此小扰动会减弱,如图4(a)和图5(a)所示,整个空间的交通流是均匀的。当τ1=0.2时,τ2=0.2、τ2=0.3和τ2=0.4不满足线性稳定性条件,如图4(b)、(c)、(d)和图5(b)、(c)、(d)所示。
(a) τ2=0.1

(a) τ2=0.1
如图6所示,磁滞回线将随着τ2增大而增大,这与交通流不稳定性的相对应。在交通流稳定的情况下,相空间不会产生磁滞回线,而是只在最优速度曲线上存在一个点。这说明τ2越大,交通堵塞越严重。这些扰动将沿着传播足够的增长以引发非线性效应。最后,交通流会发生振荡和交通波。从图4(b)、(c)、(d)中将依次出现三角形冲击波、孤立波和振荡波。

图6 考虑不同延迟的磁滞回线
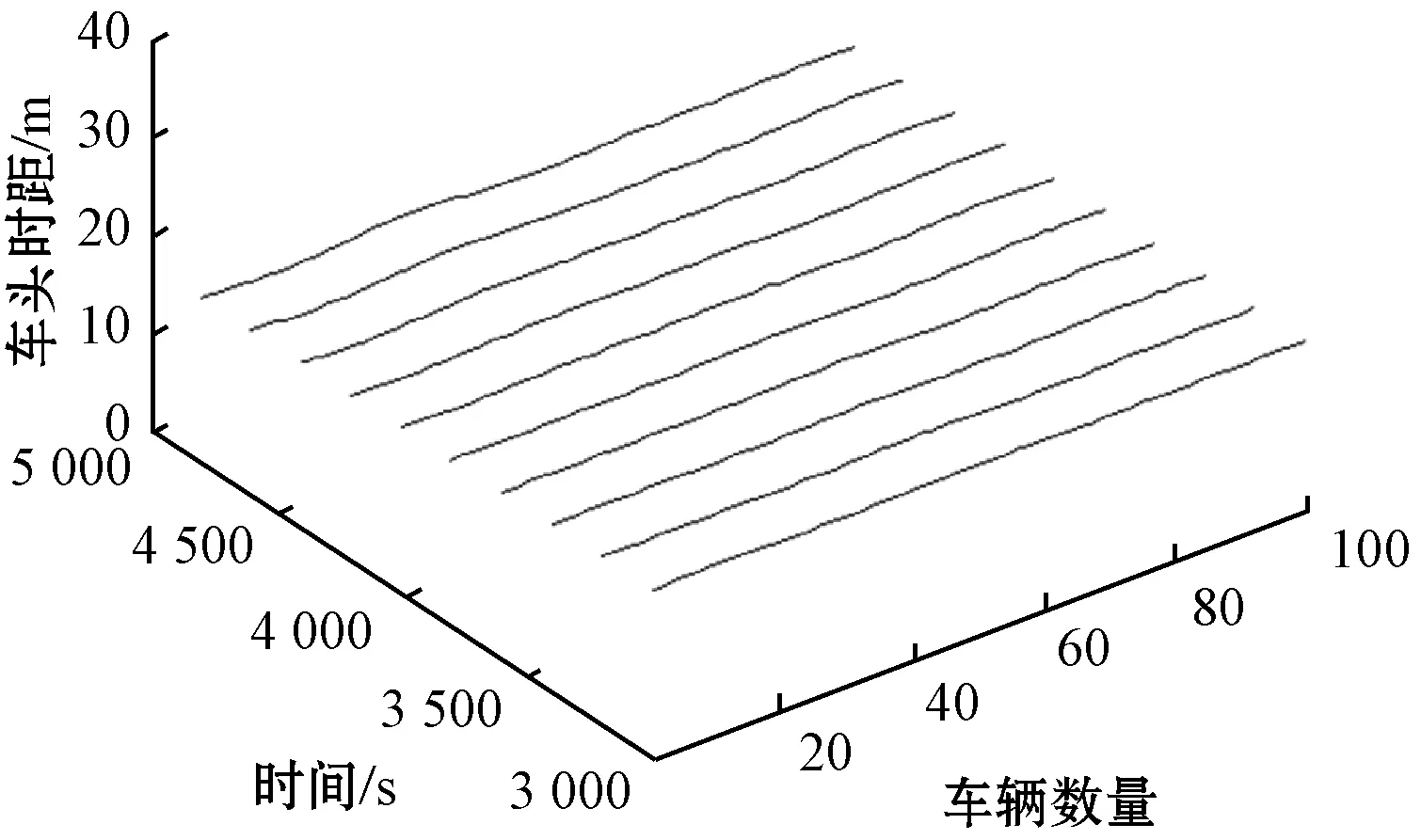
图7所示为在τ2不改变、τ1不同的情况下,足够长的时间后车头时距的时空演化规律。图7和图8分别展示了t=4 000 s获得的交通波的时间演变和相应的车头时距曲线。对于τ1=0.1、τ1=0.2和τ1=0.3,小扰动会被放大;然后,小扰动将传播足够的增长以触发非线性效应;最后,交通流量会发生振荡和交通波。图7(a)、(b)、(c)与图8(a)、(b)、(c)分别对应三角形冲击波、孤立波和振荡波。利用线性稳定判断依据式(28)可知,当τ1=0.4与τ2=0.3时的交通流是稳定的。
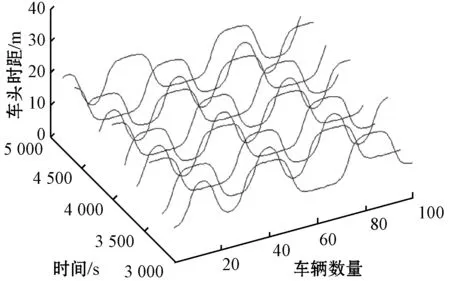
(a) τ1=0.1

(a) τ1=0.1
如图9所示,磁滞回线将随着τ1的增大而增大。当τ1的时延增加时,交通流会趋于稳定,且相空间不会产生磁滞回线。这表明当τ1的时延增加时,交通堵塞将稳定。因此,小扰动会被减弱,如图7(d)、图8(d)所示,整个空间的交通流是均匀的。这表明,适当增加驾驶员对主机速度的反应时间有助于在一定程度上降低非线性效应。
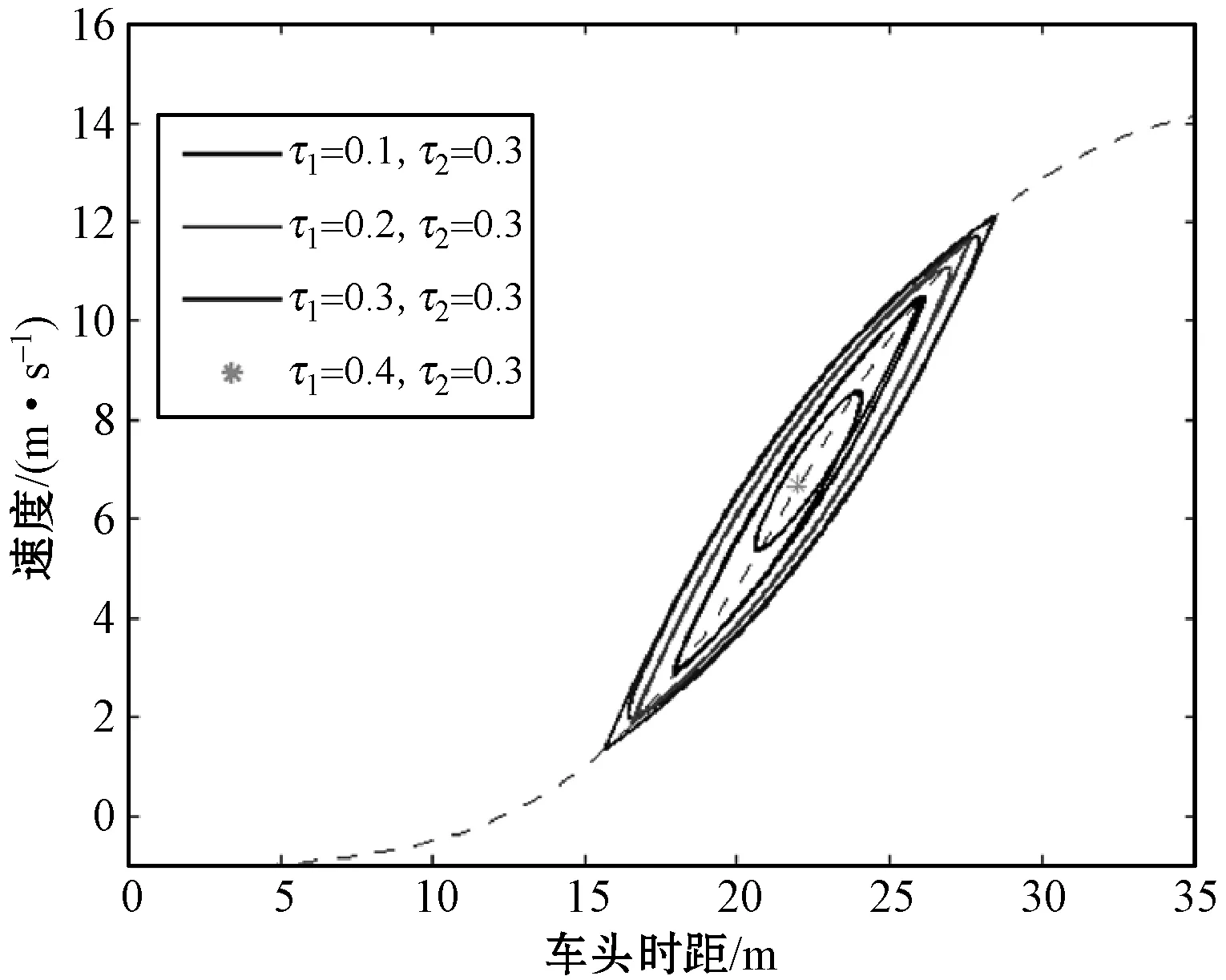
图9 考虑不同延迟的磁滞回线
5 结 语
本文提出了考虑车辆合作与时间延迟的车辆跟驰模型,研究了模型的线性稳定性条件,建立了稳定性判定依据。研究发现,延迟与合作是依赖模型的。然后讨论了合作与时滞的关系,并推导出车辆跟驰模型的Burgers方程与KdV方程的综合方法,得到其孤立波解和约束条件。最后利用解析和数值方法研究了合作最优速度(OV)模型的性质,该模型估计了延迟对交通阻塞演化的影响,研究了系统的震荡波和时走时停波。数值结果表明,在考虑协同作用的情况下,交通阻塞得到了抑制。此外,对相对运动的感知延迟容易触发交通波,传感器对主控车辆的延迟检测,在一定程度上有利于缓解失稳效应。目前,该方法还不能直接应用于实际交通场景。因为此方法忽略了很多细节,包括车辆动力学、道路环境和驾驶员状态等,同时,也没有考虑偶然性及不确定性,比如道路突发事故、噪声干扰等。本文方法仍有很多限制,这些因素将在今后的研究中加以考虑。
猜你喜欢
建材发展导向(2022年20期)2022-11-03
中国交通信息化(2022年9期)2022-10-28
上海师范大学学报·自然科学版(2022年3期)2022-07-11
农业工程学报(2022年6期)2022-06-27
汽车实用技术(2022年5期)2022-04-02
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
新农业(2018年3期)2018-07-08
电机与控制学报(2018年9期)2018-05-14
珠江水运(2016年23期)2017-01-04
考试周刊(2016年62期)2016-08-15