
巡检机器人塔上充电站设计
2021-04-13 13:43陈丽霞陈奕凡
通信电源技术 2021年20期
陈丽霞,林 杰,张 焰,卢 海,吴 炅,徐 研,胡 燃,陈奕凡
(广东电网有限责任公司 广州供电局输电管理一所,广东 广州 510000)
1 巡检机器人充电系统设计
1.1 整体设计方案
巡检机器人充电系统采用两块36 V/450 W的单晶硅太阳能电池板和外转子24 V/400 W的三相交流永磁发电机作为发电装置,24 V/300 (A·h)的磷酸铁锂电池作为储能装置。在发电装置增加风光互补控制器和充电站控制单元,改进充电模组的电控系统,优化充电模组机械结构[1]。自动充电结构安装在巡检机器人移动平台上,当巡检机器人需要充电时,机器人按照指令移动到充电室指定位置,自动充电机构进行充电对接操作。充电完成后,机器人自动充电结构断开电器连接。巡检机器人充电的过程中会对其充电结构的位置进行准确判断,这样可以保证充电过程安全可靠[2]。
风光互补控制器分为数据采集和能量管理两部分。其中,数据采集借助外接高精度电流、电压以及温度传感器获取发电模组各个组件的工作状态,并提供过流、过压、欠压、过载、短路及温度等多重保护;能量管理是通过最大功率点跟踪(Maximum Power Point Tracking,MPPT)充电控制器,使发电装置以最大的功率给蓄电池充电,在发电装置和蓄电池的负端串入功率MOSFET,提供强大的控制能力和保护能力[3]。
1.2 充电模组设计
变电站巡检机器人采用客户端与服务器连接的系统模式,其中客户端通过与主控室的计算机服务器进行连接,以实现对巡检设备以及巡检机器人动作的控制。远程控制系统包括定位导航、数据采集和传输,通过无线网络连接的形式来实现。并且无线网络在实现客户端与服务器之间数据通信与传输时,需要具备较高的带宽,具有较高的实时性,能够提高抗干扰能力与可靠性[4]。
充电站控制系统实时监控输入输出信息,可通过RS485通信接口获取风光互补控制器和充电模块各组件的工作状态,对数据保存生成日志。通过WiFi通信接口将数据传送到控制系统,同时可从后台系统接收控制指令,获取机器人的状态信息,从而对整个巡检机器人塔上电源供应装置进行控制,使整个系统可以长久、稳定、可靠地运行[5]。
新的充电站将在导槽的前端两侧增加机械凹槽,当机器人进入充电站时,机械锁可以准确落入机械凹槽,使得充电站具备对机器人自身锁定机构的加固结构,可以加强机器人锁定机构的强度以及稳定性,延长机器人自锁装置的使用寿命,减少故障率。在机械凹槽内增加机器人锁定机构的脱离装置,当机器人自身的机械锁发生故障时,远端控制可以远程操作充电站凹槽内的推起装置,将机器人机械锁推起进行解锁,保证机器人可以正常取下维护或者紧急执行任务。充电站采用框架式轻量化设计,并使用铝合金材料以及计算机数字控制(Computer Numerical Control,CNC)加工工艺,大幅度减轻其重量[6]。
2 充电站控制系统设计
充电站控制系统为多链路通信方式,采用RS485总线和WiFi通信接口,通信协议具有循环冗余校验(Cyclic Redundancy Check,CRC)。另外制定巡视机器人塔上电源供应装置整体充放电方案[7]。
充电站控制系统不仅可以通过RS485总线与风光互补控制器和充电模组控制系统进行数据交互,获取太阳能电池板发电量、风力发电机发电量、电池剩余电量、充电站用电量、机器人用电量以及个各模块的工作状态信息等,保存数据生成日志。而且可以通过无线WiFi通信接口接入到后台系统,从后台系统获取机器人的状态,接收后台系统的控制指令,然后转发到风光互补控制系统或充电模组电控系统,控制发电装置和充电模组的工作状态,实现发电装置电源的通断、负载电源的通断、充电模组的电源通断、无线充电系统的电源通断,使巡视机器人塔上电源供应装置可以长时间稳定且可靠地运行[8]。
充电站控制系统除了提供RS485通信接口和无线WiFi接口外,还提供标准的RS232、USB、CAN等有线通信接口以及蓝牙或ZigBee等无线通信接口,便于扩展通信方式,可以方便远程或现场获取巡检机器人塔上电源供应装置中各个设备的运行信息,控制各个设备的运行状态,为现场检修、排除故障提供数据检测和安全保障。不仅如此,还提供多重保护功能,其中包括漏电保护、过流保护、过温保护、过欠压保护、防浪涌保护以及防反接保护等。
此外,充电站控制系统采用太阳能电池板和风力发电机双路供电输入,当无光有风时,使用风力发电机给巡检机器人塔上电源供应装置系统供电;当有光无风时,使用太阳能电池板给巡检机器人塔上电源供应装置系统供电;有风有光时,同时使用太阳能电池板和风力发电机给巡检机器人塔上电源供应装置系统供电。当电池电压高于29.6 V(即蓄电池满电量)时,充电站控制系统自动切断电池充电MOS管,停止给蓄电池充电;当蓄电池电压低于25.2 V(或蓄电池电量为80%)时,充电站控制系统自动打开电池充电MOS管,开始给蓄电池充电;当蓄电池电压低于22.2 V(或蓄电池电量为20%)时,切断无线充电系统的电源输入和网桥通信负载供电MOS管,保持太阳能电池板和风力发电机的供电输入,确保发电装置能正常给蓄电池充电,风光互补控制器、充电站控制系统、充电模组电控系统进入低功耗模式,关闭蓝牙和WiFi通信;当电压恢复到23 V(或蓄电池电量为40%)时,风光互补控制器、充电站控制系统、充电模组电控系统恢复正常工作模式,打开蓝牙、WiFi通信,打开网桥通信负载供电MOS管,并从后台系统获取机器人的电池状态,判断是否需要打开无线充电系统给机器人充电。此外,机器人的充电分时段进行,20:00-24:00充电一次,06:00-10:00充电一次,13:00-14:00充电一次。
为提高巡检机器人塔上电源供应装置上通信系统的抗干扰能力和通信接口的防护能力,所有通信接口采用符合各个通信标准的收发器,对通信模块进行电源和信号采用数字隔离,外置静电释放(Electro-Static Discharge,ESD)二极管以及瞬态二极管(Transient Voltage Suppressor,TVS)进一步保护,并且通信协议具有CRC校验,数据错误自动重发送。下面以RS485通信接口为例,讲述通信链路的设计方案和保护措施。
巡检机器人塔上电源供应装置上的RS485通信接口均使用菊花链连接其节点,也称为合用线或总线拓扑。在这种拓扑结构中,所使用的驱动器、接收器以及收发器通过短网存根接入主干线。接口总线用于半双工传输,其总线结构如图1所示。
RS485通信使用符合RS485标准的驱动器,可在54 Ω负载上提供不小于1.5 V的差分输出以及符合该标准的接收器,可检测到低至200 mV的差分输入。即使在电缆和连接器信号严重衰减的情况下,这两个值仍能为高可靠性的数据传输提供充足的余量。RS485规定的最低总线信号电平如图2所示。采用双绞线传输数据,外部干扰源会以共模方式均等地耦合到两根信号线上,这些噪声会被差分接收器过滤掉,从而稳健而可靠的传输数据[9]。

图2 RS485规定的最低总线信号电平
此外,系统对RS485总线进行信号及供电电源隔离,如图3所示,能够容忍数千伏接地电势差,并且可长距离传输的RS485数据。另外,RS485通信协议具有校验功能。
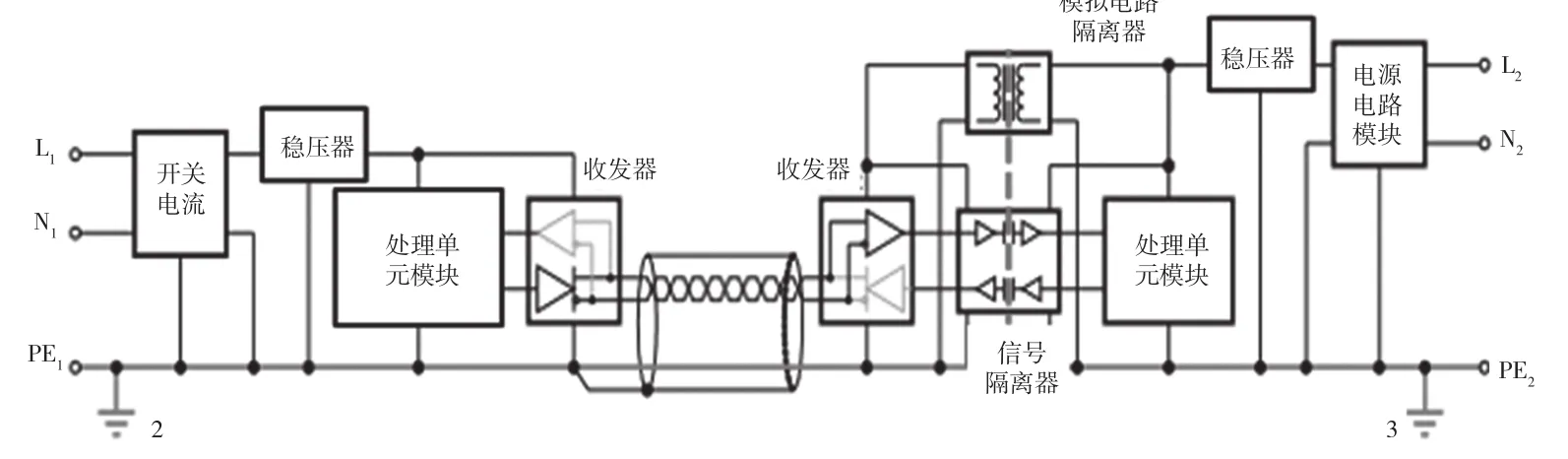
图3 具有单接地基准的两个远程收发信站的隔离
充电站控制系统和后台系统的端到端数据处理时延≤0.8 s,常规控制指令、数据查询响应时间≤4 s,一般画面调出响应时间≤2 s,过压、过流保护时间<0.1 s,过温保护时间≤0.8 s;电压检测误差<2%,电流检测误差<2.5%,温度测量误差<2.5%,电量统计误差<1‰。塔上充电站电源充电模块具有防雷、防浪涌以及防突波保护,采用2 000 V直流电气隔离接口,内建2 kV浪涌保护,电源和通信接口提供了电磁兼容(Electro Magnetic Compatibility,EMC)可靠保护。严密设计给内部元件提供安全的工作环境,防水防尘设计能够轻松应对雨雪天气[10]。
3 结 论
巡检机器人充电系统的发电模组中集成可回传自身状态的通信装置,使得发电模组的发电量和蓄电量利用情况实现了精准统计与分析,可以对充电状态做到全程防护,极大保障了巡检机器人的电量供应。此外,巡检机器人充放电控制系统用于机器人无人自动管理充放电能够达到无人自动化、充分利用资源的目的,该充电系统可推广至无人机、机器人以及新能源汽车等领域,前景较为广阔。
猜你喜欢
电气技术(2022年6期)2022-06-27
科学家(2021年24期)2021-04-25
环球时报(2020-12-08)2020-12-08
通信产业报(2020年31期)2020-09-10
房地产导刊(2020年6期)2020-07-25
北京汽车(2019年2期)2019-05-16
中国计算机报(2018年50期)2018-02-23
电脑爱好者(2016年8期)2016-04-28
微型计算机(2009年12期)2009-12-21
现代电子技术(2009年14期)2009-09-05
