
基于优化SVPWM算法的永磁同步电机矢量控制系统
2021-04-13 13:42何湘龙
通信电源技术 2021年20期
何湘龙
(湖南石油化职业技术学院,湖南 岳阳 414000)
0 引 言
永 磁 同 步 电 机(Permanent Magnet Synchronous Motor,PMSM)的一般定义为一种采用高能永磁材料为转子的电机,具有结构简单、调速区间宽、实效好以及误差小的优点,被广泛应用于军事、新能源汽车、工业控制等领域。目前,永磁同步电机正朝着大功率化、智能化以及微型化的方向发展[1]。
近年来,电力电子技术、DSP技术得到了极大的提高和发展,为采用矢量控制PMSM提供了可能。SVPWM作为矢量控制方法之一,是基于矢量坐标变换,通过脉冲信号实现对电机在电流和速度双闭环中的控制[2]。但传统的SVPWM算法需要变换多次坐标,不利于控制系统中的参数调整和测试验证。本文使用一种优化的SVPWM控制算法,减少坐标变换,并使用MATLAB/Simulink进行仿真测试,结果表明系统具有稳定、抗干扰能力强等优点。
1 永磁同步电机的数学模型
当永磁同步电机接通三相对称正弦波电源时,电机内部产生旋转磁场。输入的电源为理想的三相对称正弦电源[3],则:

由式(1)可知,对称的定子绕组空间上呈互差120°分布且阻抗一致。得到电压空间矢量为:

在电源时序不同的变化过程中,k值可以根据需要取不同的值,以保证功率不变、电压电流波形峰值不变。在本模型中,为了使静止三相坐标轴上的投影和分矢量的合成空间矢量相等,k值取当然这是建立在理想电源基础上的。此时,电压空间矢量表示为:

进一步分析,由式(1)、(2)、(3)可以得到:

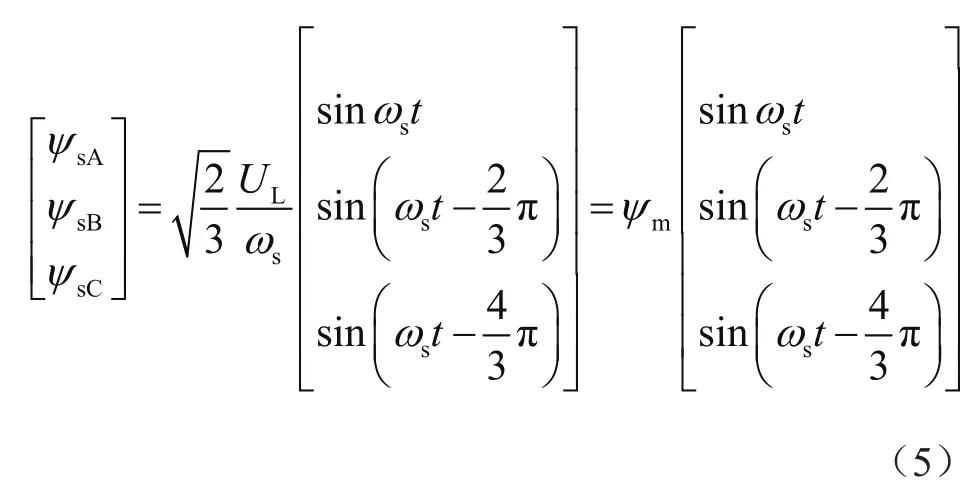
对电压积分,利用等式两边相等的原则有:
2 SVPWM控制策略
在应用中,PWM逆变器作为SVPWM控制的主要对象,可实现较为简单的开关量控制,如图1所示。电压空间矢量图可通过不同开关状态进行组合得到,根据排列组合确定6个扇区进行SVPWM算法优化[4]。

图1 PWM逆变器电路
图1中,1—6为绝缘栅双极型晶体管(Insulated Gate Bipolar Transistor,IGBT)。系统提供一个直流电压Ud,SA、SB、SC、SD、SE以 及 SF将 3个 A、B、C桥臂分成8种开关状态,8种不同的开关状态分别对应8个不同的电压空间矢量。其中,1号和4号IGBT导通、3号和6号IGBT导通、5号和2号IGBT导通时产生电压矢量幅值为零,称为零矢量,作用于电机时不形成磁链矢量[5]。其他状态对应非零电压空间矢量,矢量的幅值为只有电机处于非零矢量作用时,才会形成相应的磁链矢量来控制永磁同步电机的运行。
在实际分析永磁同步电动机控制系统时,SVPWM控制的是电路中各个开关状态,从而产生不同的输出电压空间矢量来分析永磁同步电机定子上的电压空间矢量。依据8种不同开关状态组合,可以得到如图2所示的定子电压空间矢量和扇区图。
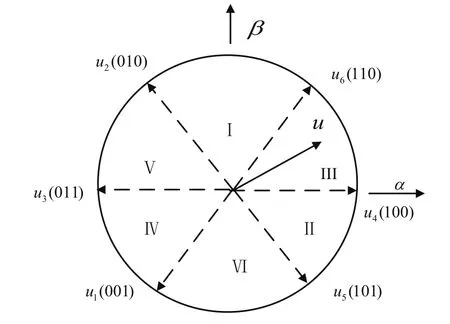
图2 SVPWM定子电压空间矢量、扇区
整个定子电压空间矢量、扇区图分为了6个扇区,每个扇区中包括两个矢量uα、uβ,分别由扇区边界中有方向和大小的电压空间矢量进行合成[6-9]。为了便于计算分析扇区,特引入3个附加变量A、B、C。A、B、C的矢量u值由待合成的空间α、β两个坐标轴分量uα、uβ来决定,有以下关系式:
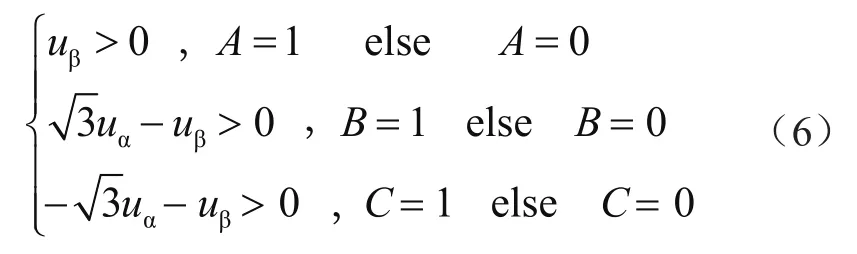
根据三相电源中B相序超前A两倍、C相序超前A 4倍,可以得到N=A+2B+4C。这样,当N取不同的值对应的扇区位置,每个扇区的空间电压矢量就可以确定下来。
3 Matlab/Simulink仿真模块的建立与结果分析
MATLAB和Simulink是系统的仿真软件,在仿真过程中需要提供可行的观测量。将观测量输入到软件自带的虚拟示波器或显示器上,即可以观测到系统各参数。
3.1 电压空间矢量位置的判定模块
根据前面控制策略得出的结果,以得到的判定电压空间矢量位置作为数学依据,在一系列分析计算的基础上,可以在Simulink中得到电压空间矢量所在扇区的功能逻辑,如图3所示。

图3 电压空间矢量扇区的确定
3.2 基本空间矢量作用时间的确定
在Simulink中有Multiswitch选择这项功能,它能建立不同的扇区相对应的电压空间矢量的作用时间,仿真模型如图4所示。

图4 基本电压空间矢量作用时间模型
3.3 比较值的计算
Simulink具有逻辑比较计算功能,能将各个扇区内的PWM脉冲跳变对应的比较值和给定的完整三角波进行逻辑比较,在Switch元件输出端产生PWM脉冲。一般情况下,最优化原则是开关动作次数最少,仿真模型如图5所示。
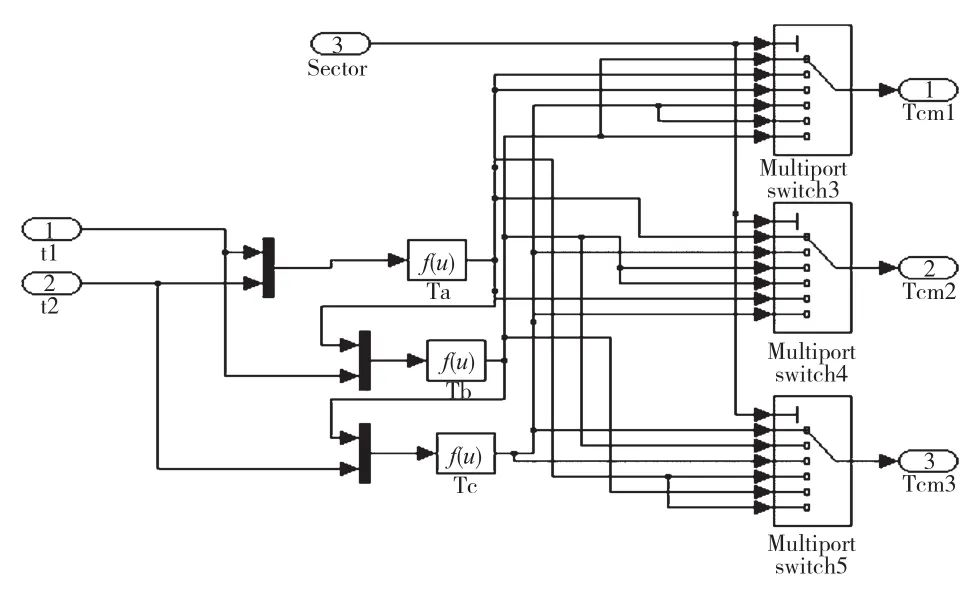
图5 逆变器3个桥臂动作时间计算及选择
在Powersys库中选择IGBT模块,选择相应的永磁同步电机负载,将图5中产生的PWM脉冲作为IGBT模块的输入端,观察永磁同步电机电压空间矢量值。但SVPWM只是一个脉冲产生工具,没有电机的具体控制算法。这里对两个互差90°的正弦波进行合成作为所期望的空间电压矢量,来模拟给定的圆形电压空间矢量,如图6所示[10]。

图6 给定的电压空间矢量的轨迹
为了限制给定的空间矢量在线性区内,减少系统的非线性度,虽然控制系统的直流电压为600 V,但给定电压空间矢量幅值大小对应输出交流相电压的最大值。试验所带负载额定电压为380 V,电机相电压有效值为220 V,给定旋转电压空间矢量的电压幅值为310 V。仿真结果如图7和图8所示。

图7 电机转速与电磁转距图
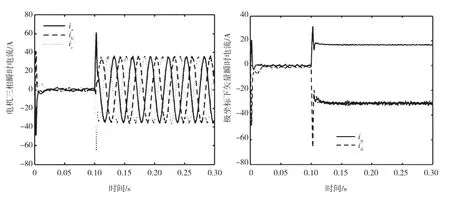
图8 电机3项电流特性
4 结 论
通过对永磁同步电机数学模型与控制策略的分析,优化了SVPWM算法,利用Matlab/Simulink建立了系统仿真模型。仿真结果表明,该永磁同步电机电压矢量控制系统实时响应好、输出稳定、计算量小,理论分析与仿真结果相吻合,具有一定的的可行性和科学性。
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年4期)2022-08-17
防爆电机(2022年4期)2022-08-17
计算机技术与发展(2022年7期)2022-08-02
防爆电机(2022年3期)2022-06-17
南北桥(2022年2期)2022-05-31
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09
计算机技术与发展(2020年2期)2020-04-15
