目标辐射特性现场校准用大面积黑体辐射源技术研究
2021-04-12 05:39:50张玉国刘保炜郭亚玭王加朋
应用光学 2021年2期
李 超,张玉国,刘保炜,曹 静,郭亚玭,王加朋
(1.中国兵器工业试验测试研究院,陕西 华阴 714200;2.北京振兴计量测试研究所,北京 100074;3.南京理工大学 机械工程学院,江苏 南京 210094)
引言
随着红外成像和红外探测技术的发展,其在空间探测、对地观测、安防监控等领域的应用越来越广[1-2]。目标辐射特性数据是红外成像和红外探测系统的重要保障数据,因此,目标红外辐射特性测量成为国内外重要的研究方向,是获取目标特征、对目标进行识别的重要手段之一,可为目标识别、跟踪提供重要的特征信息。目标红外辐射特性包括目标辐射亮度、辐射强度及辐射温度等重要参数,可为红外成像及探测设备的设计优化、探测能力分析、性能评估、验证试验等提供依据[3-5]。
在外场目标辐射特性测量中,影响目标特性测量准确度的因素有背景辐射、大气温度、大气透过率等,这些因素比较复杂,不同地区或同一地区不同时间,其值处于不断的变化中,精确测量比较困难。因此,为了保证测量准确性,必须利用大面积黑体辐射源对目标特性测量设备进行现场辐射参数校准[6-7]。
本文设计了一种大面积黑体辐射源,可在外场实际环境下实现目标特性测量设备辐射参数的校准,经初步试验验证,取得了较好的应用效果。
1 系统设计
大面积黑体辐射源的功能是提供标准红外辐射源,在外场可对红外目标特性测量设备进行校准,主要包括辐射体、加热分系统、温度测量及控制分系统等,其中加热分系统包括加热片、保温层、风扇、把手等,温度测量及控制分系统包括温度传感器、温控器、航插、柴油发电机等,保证在外场可靠工作,其构成框图如图1 所示。

图1 系统框图Fig.1 Block diagram of system
辐射体采用铝材质并发黑处理,在辐射面背后贴加热膜,可为辐射面提供加热源,控温仪拟采用PID 控制器,可在现场直接操作或通过RS485 串口远程通信,对黑体辐射源进行温度调节和控制。
大面积黑体辐射源温度控制采用PID 控制算法,其工作原理如图2 所示。高温黑体中的传感器将黑体的温度值实时传输到PID 控制器中,PID 控制器将黑体的实测温度与设定温度做差值运算,温度控制器对该值做PID 运算,得到一个输出控制信号,此控制信号控制加热驱动部件,驱动部件根据控制量的大小,输出直流电压,从而驱动加热器工作。由于黑体工作温度远远高于环境温度,在室外环境可通过自然辐射持续降温,相当于黑体辐射源有一个制冷功率。因此,通过调节黑体的加热功率即可构成一个闭环控制系统,使黑体稳定在设定的温度点。
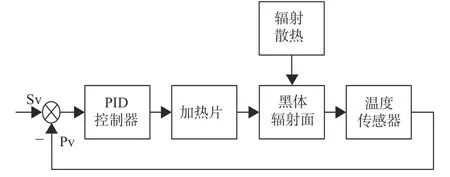
图2 大面积黑体辐射源控制原理图Fig.2 Schematic diagram of large area blackbody radiation source control
2 分系统组成
2.1 辐射体分系统
为了满足黑体均匀性、加热效率和便携性的要求,辐射板选择热传导率较高的材料,通过对重量、热平衡和刚性的综合考虑,选用辐射板厚度约10 mm,有效辐射面约1 000 mm×1 000 mm,辐射板的组成结构图如图3 所示。

图3 辐射板结构图Fig.3 Structure diagram of radiant panel
辐射板下加热片分为7 个区域,在每个加热区安装多个传感器以便进行温度控制,保障整个辐射面的温度均匀性。为提高辐射板发射率,辐射板表面进行粗糙化处理后喷涂高发射率涂层[8-10],发射率可达到0.98,为进一步提高辐射面温度均匀性和外场适应性,在辐射板四周设计绝热层。
2.2 加热分系统
热控系统由加热系统和控制系统组成,是黑体辐射源的重要部件,通过合理选择加热功率分布可以有效提高黑体辐射源的均匀性和控制稳定性。加热区域与辐射板分区对应,分为7 个区域,对每个区域的热工作情况进行仿真,发现其功率密度不同,热工作状态仿真图如图4 所示。

图4 热工作仿真图Fig.4 Simulated diagram of thermal working
加热片为多层结构,其剖面结构如图5 所示。加热片上下层均为绝缘层和匀热层,可防止低温脆化损坏造成辐射板短路。

图5 加热片剖面结构图Fig.5 Sectional structure diagram of heating plate
2.3 温度测量及控制分系统
温度测量选用Pt100 高低温传感器,并通过计量保证其测量精度,在安装时确保与辐射板接触良好,保证测量准确性。大面积黑体辐射源辐射面积大、均匀性高,并且需要在外场工作,存在风力、太阳辐照、温度、湿度等多种变化的干扰因素。此外,为了实现均匀加热,采用的是分区加热,由7 个加热区域组成,属于多输入多输出系统,各加热区之间存在耦合,造成控制模型无法确定,控制性能严重下降,因此,本系统属于非线性、时变性强的耦合系统,整体控制难度大。
传统的温度控制方法解决单一问题是有效的,对对象的传递函数的非线性和时变性考虑较少,无法满足本项目温度控制要求。
大面积黑体辐射源采用基于神经网络的多区域高均匀性温度协同控制技术,可实现大面积黑体辐射源的温度控制。基于神经网络的控制系统具有学习功能,能够适应控制,并实现多输入、多输出间的映射,能弥补经典PID 控制方法的缺陷,两者结合对于非线性、时变性系统的工作性能优越,具有良好的控制稳定性和可靠性。
为了进一步提升性能,采用BP 神经网络,即误差反向传播神经网络,属于典型的多层前向网络。BP 神经网络采用3 层结构,包括输入层、隐层、输出层,如图6 所示。图6 中给出BP 神经网络的基本单元,即多温区控制系统中的单温区控制神经网络。输入层神经元为4 个,分别对应某温区设定温度r,实际温度y1,误差信号e和相邻温区的实际温度y2,引入相邻温区的反馈信号,并考虑到不同温区间的耦合作用,因而作为参考信息,提升控制均匀性。隐层神经元为5 个,对应中间过程变量,输出神经元为3 个,对应PID 参数kp、ki、kd。
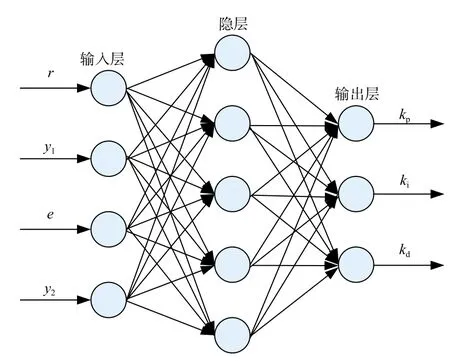
图6 BP 神经网络结构模型Fig.6 Structural model of BP neural network
网络输入层的输入为

网络隐含层的输入及输出为

隐含层神经元的激发函数为正负对称的S函数,即:

网络输出层的输入输出为

由于kp、ki、kd不能为负值,所以输出层神经元的激发函数为非负的S函数,即:

采用基于神经网络的多区域高均匀性温度协同控制技术,可实现大面积可重构红外辐射源的温度控制。基于神经网络的控制系统具有学习功能,能够适应控制,并实现多输入、多输出间的映射,能弥补经典PID 控制方法的缺陷,两者结合对于非线性、时变性系统的工作性能具有良好的控制稳定性和可靠性。
图7 为基于BP 神经网络的控制器结构,通过BP 神经网络结构进行PID 控制参数解算,实现高稳定性控制。基于BP 神经网络的控制器为两分区温控系统,将其进行扩展,考虑将不同温区之间的耦合、各类环境因素的干扰等因素组成任意输入、任意输出的温控系统,可实现大面积可重构红外辐射源的温度控制。

图7 基于BP 神经网络的控制器Fig.7 Controller based on BP neural network
本文依据具体的硬件设计,结合基本经验采用基于BP 神经网络的PID 控制器。控制器的输入变量为对应某温区设定温度r,实际温度y1,误差信号e和相邻温区的实际温度y2,引入相邻温区的反馈信号,输出变量为比例参数kp、微分参数kd、积分参数ki。
PID 参数的整定必须考虑到不同时刻3 个参数的作用及相互之间的关系以及对温控系统调节性能的影响。通过对大面积黑体辐射源的观测,根据如下情况确定:
1) 当温度偏差信号 |e|较大时,选择较大的kp值,快速消除偏差,加快响应时间,同时为了避免系统产生较大超调量去掉积分,为避免产生微分饱和选择较小的kd值。
2) 如果偏差e、偏差变化量e(c)同向,则表示温控系统的温度偏差变化方向为逐渐增大。若|e|较大,为使e值迅速减小,kp应该选择较大的值,为防止发生震荡,ki的值取较小值,kd的值选择中等可以提高系统的稳态性能和动态性能;如果 |e|较小,需要改变偏差增大的变化趋势,为提高系统的稳态性能,应该选取较大值的ki、较小值kd,为了避免发生振荡,选择中等值的kp;当 |e|和|e(c)|为中等大小时说明系统处在跟随状态,kp值可以选小些,ki和kd选取适中,若kp、kd和ki取值太大,则会增大超调量。
3) 如果e、e(c)反向,则表示温控系统的温度偏差向绝对值减小的方向变化。若 |e|较大,选择中等的kp值,较小的ki值和中等的kd值,使e值迅速减小;若 |e|较小,此时可取较小的kp,ki可取较大,kd取较小。
通过上面的讨论,结合kp、kd、ki对系统输出的影响情况,可以归纳出对应的不同e、e(c),对参数kp、ki、kd不同情况进行仿真,图8~图13 是控制器的PID 参数整定曲线。

图8 温区1 的kp 整定曲线Fig.8 kp setting curve of temperature zone 1

图9 温区1 的ki 整定曲线Fig.9 ki setting curve of temperature zone 1

图10 温区1 的kd 整定曲线Fig.10 kd setting curve of temperature zone 1

图11 温区2 的kp 整定曲线Fig.11 kp setting curve of temperature zone 2

图12 温区2 的ki 整定曲线Fig.12 ki setting curve of temperature zone 2

图13 温区2 的kd 整定曲线Fig.13 kd setting curve of temperature zone 2
比例、积分和微分系数在温度偏差较大时变化较剧烈,在偏差减小时趋于稳定。证明该算法具有不错的自适应能力和抗干扰特性,伴随温度的运行状态PID 参数会自动调整。根据仿真值进行验证试验,确定最终各区的参数初始值,由算法根据控制情况计算参数值。
对大面积黑体辐射源进行性能测试。温度稳定性是指在正常工作状态下,大面积黑体辐射源的温度随时间的变化幅度。由于温度随时间随机变化,是一个随机过程,温度稳定性的验证方法是在保证测量条件不变,将面源黑体设置在测试目标温度,待其稳定后,每隔5 min 记录液晶显示屏显示的温度值,记录50 次。按上述操作步骤重复测试323 K、373 K 下的温度稳定性,如图14 和图15所示。

图14 目标温度为323 K 时温度稳定性曲线Fig.14 Temperature stability curve at 323 K

图15 目标温度为373 K 时温度稳定性曲线Fig.15 Temperature stability curve at 373 K
由图14 和图15 可以看出,目标温度在323 K时达到稳定后在49.9985 K~50.0010 K 之间波动;目标 温度 在373 K时达到稳定后在99.9980 K~100.0010 K 之间波动,稳定性均在0.03 K 之内。同时,通过多传感器的温度读数,判定通过多区耦合控制,在373 K 设置温度条件下,均匀性在0.2 K 之内,经过标定,温度传感器测量精度在0.1 K 之内。最终大面积黑体辐射源实现如下指标:
1) 发射率,≥0.98;
2) 稳定性,0.03 K;
3) 均匀性,0.2 K;
4) 温度测量精度,0.1 K。
3 参数校准方法
根据红外目标特性测量设备采集到的红外图像序列、地面定标黑体实时温度等数据,通过建立的专用数学模型,分析得出整个测量过程中目标红外辐射特性并进行校准。目标辐射温度及辐射亮度初步校准方案[11-13]如下:
由普朗克定律,黑体光谱辐射亮度为

式中:L(λ,T)为温度T的黑体辐射源在波长为 λ处的光谱辐射亮度; ε为黑体辐射源的发射率;c1、c2分别为第一辐射常数和第二辐射常数。
由(1)式可得,在 λ1~λ2波段黑体积分辐射亮度为

在同一帧红外图像中,靶标与地面黑体的灰度值分别为DB和DT,k为比例系数,与被校系统响应度相关。则靶标的辐射亮度为

因此辐射亮度根据(6)式和(7)式可反演靶标辐射温度。
4 试验验证
采用大面积黑体辐射源在外场对无人机载红外目标特性测量设备进行现场校准[14-16],原理图如图16 所示。

图16 无人机载红外目标特性测量设备进行现场校准示意图Fig.16 Field calibration diagram of UAV infrared target characteristics measuring equipment
在中波波段对校准系统进行测试,测试数据如表1 所示。

表1 无人机载红外目标特性测量设备现场校准验证试验数据记录表Table 1 Field calibration verification test data of UAV infrared target characteristics measuring equipment
以大面积黑体辐射源为基准对外场目标进行测量,并与地面标准热像仪测量的数据进行对比,进行不确定度评估[17]。最终评估结果为:环境温度为26.8 ℃,湿度为60%时,经试验数据分析可知,辐射温度测量不确定度为0.4 ℃(k=2)。
5 结论
本文设计了一种大面积黑体辐射源,可在外场实际环境下实现目标特性测量设备辐射参数的校准,并取得了较好的应用效果。将基于此技术的标准设备产品化、系列化,具有灵活的对外接口及环境适应性,可用于其他领域,如地球测绘、海洋观测、气象预报、环境及气候监测、地球资源探测等,具有非常广阔的应用前景。
猜你喜欢
包装工程(2023年24期)2023-12-27 09:20:00
遥感学报(2023年10期)2023-11-24 09:57:20
计量学报(2022年7期)2022-08-23 09:23:28
北京航空航天大学学报(2020年10期)2020-11-14 09:26:16
仪表技术与传感器(2019年9期)2019-10-14 06:15:04
雷达学报(2018年5期)2018-12-05 03:13:16
雷达学报(2018年3期)2018-07-18 02:41:20
电子设计工程(2017年20期)2017-02-10 03:39:23
工程建设与设计(2016年2期)2016-08-22 09:12:56
真空与低温(2015年4期)2015-06-18 10:47:26