
智能办公桌手托及桌面设计
2021-04-12 02:23曹梦昊
机电产品开发与创新 2021年1期
赫 亮, 刘 伟, 曹梦昊
(1.北京建筑大学 机电与车辆工程学院, 北京 100044; 2.北京市建筑安全监测工程技术研究中心, 北京100044)
0 引言
智能办公桌的研发可以在一定程度上解决人们久坐不动对身体的影响, 同时还能为人们在办公室工作提供一定的便利[1]。智能办公桌应该不仅仅是办公的基本工具,还应该能够为人们提供更多的乐趣, 让公司的员工在高强度的工作中保持良好的情绪和健康的身体[2]。
目前市场上售卖的办公桌大多数只能实现升降功能,改变办公桌的高度,从而实现站立式办公和坐式办公的转换[3]。 在实际调查当中,智能办公桌需要更多更加便捷和更加舒适的体验[4]。本款智能办公桌即从另外的角度进行了设计,在桌面部分设计了环抱式手托系统,该系统主要有以下优点:①让用户体验到私人空间的存在,拥有一定的环抱感,提升办公室人员的工作热情和效率;②在工作时将桌面的宽度增加,在工作后收回,达到节省空间的目的; ③后期可以在手托上放置光敏传感器或者压力传感器,以配合单片机系统内置的定时器,检测办公人员工作时间, 从而可以达到用户办公人员工作或学习一定的时间之后, 系统能够智能地提醒用户办公人员进行必要的休息。
1 智能办公桌桌面的结构组成
手托部分折叠机构主要由减速电机、蜗杆涡轮、手托轴和手托主体构成。 通过红外遥控单片机对减速电机的正反方向旋转进行控制, 带动单片机对蜗杆涡轮进行正向反向旋转,蜗杆涡轮带动单片机对涡轮进行选装,形成空间交错实现涡轮轴的转矩和转速的传输, 而后蜗杆涡轮和手托轴之间通过平键的连接, 将手托的动力转速传输给涡轮到手托和轴上, 手托轴通过方形槽口与手托进行连接,带动手托进行180°翻折,通过红外遥控控制单片机,单片机控制电机正向反向转动,实现手托180°翻折功能。
2 智能办公桌手托板设计
手托板功能主要用来做肘部承接同时减小桌面长度,配合蜗轮蜗杆、电机等传动机构可以在15s 内完成折出或收回,既节约了空间,又给人以一种环抱式的感觉。手托主体结构由木制材料构成, 为实现用户工作或学习时间智能提醒功能,暂定右手托分两层设计,通过胶合进行连接,在右手托下部进行开槽,在槽位上安装光敏传感器,右手托上部分进行开孔,将光敏传感器光敏电阻部分通过孔位感知外部环境光线变化。 通过对外部光线的感知来检测用户使用的时间,再通过单片机进行判断,若用户连续工作时间过长则提醒用户在长时间工作后进行一定的必要休息。 左右手托与桌面连接部分做45°切面处理,防止在旋转时和桌面产生碰撞。左右手托手托轴相连接的部分采用壁厚为2 的方形钢管构成, 末端开有方形槽孔, 与手托轴尾端设计的方形突起配合, 形成固定机构。 既能有效地传递支撑力, 又能为桌身轻量化提供帮助。 图1 为左手托模型图, 图2 为右手托模型图。

图1 左手托模型图

图2 右手托模型图
3 桌面主要结构设计
由于手托部分和折叠机构的存在, 一体式桌面已经不能满足当前需要,需要设计上下两层分体式结构桌面,上下桌面以M6 内六角螺栓进行连接固定, 其上设计放置传动机构、电机、电控模块等部分的凹槽,同时上下桌面与手托连接部分做切口设计(见图3、图4),防止相碰。 各边角做圆角设计,防止用户在使用时磕碰造成较大损伤。

图4 上桌面模型图
在下桌面部分留有手托放置专用位置, 可以实现手托收回后,和桌面保持纯平状态,下桌面下表面做凹槽设计,其上设计通孔与下方桌腿利用螺栓连接,使桌面和桌腿形成一个完整的整体。两桌面后部留有电源接口,为之后智能办公桌供电提供便利条件。
4 手托轴和涡轮垫圈设计
手托轴用于连接涡轮与手托,传递转矩,通过测量,成年人在正常坐姿的情况下, 两手分开距离约为500mm时较为舒适,见图5,并且在电脑办公的情况下,两手成内收状。 手托轴全长560mm,其上开有2×6 标准A 型平键键槽,通过A 型平键与涡轮上的键槽进行配合,达到涡轮向手托的运动传输。两端进行方形轴向切割,预留出与手托中方型钢管孔位相配合的方形突出, 与手托钢管上开的方形槽孔进行配合,从而达到涡轮带动轴,轴带动手托进行旋转折叠的目的。全轴轴径最大处为8mm,最小处为6mm,通体由45 号钢制作,由于传递扭矩较小,在此不进行校核。

图5 手托传动轴模型图

图6 涡轮垫圈模型图
由于涡轮和手托轴采用A 型平键进行连接, 只能约束其转动方向,不能约束其滑动方向,因此特设计涡轮垫圈,见图6,通过与手托轴梯形台阶进行配合防止涡轮进行横向移动, 保证涡轮在运动范围内只有旋转方向上的一个自由度。
5 法兰和轴承设计
轴与轴之间相互连接最常用的装置就是联轴器,由于电机轴和蜗杆最末端轴径较小, 同时由于传递扭矩较小,因此采用硬质法兰进行相互的连接,见图7,通过法兰的连接使电机与涡轮转速相同,达到传递扭矩的作用,两个法兰的内径分别为4mm、6mm, 底座长度为2mm,总长度12mm, 凸台部分外径为10mm, 底座部分外径22mm。 法兰之间通过四颗360°均分的M3 内角螺栓、螺母配合进行约束,从而将两轴形成一个整体。法兰内孔与轴的连接方式采用180°对称分布的M3 开槽锥端紧定螺钉进行硬性连接, 防止两轴与法兰之间形成相互滑动以及转动,影响力矩的相互传递。
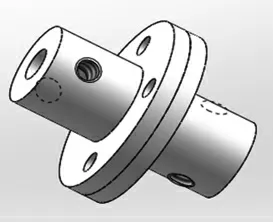
图7 法兰配合模型图

图8 轴承模型图
由于蜗杆旋转速度相对较快, 并且需要在除旋转方向以外的方向上进行运动约束,因此,采用在蜗杆两端进行轴径变小的处理, 同时在蜗杆轴两侧加上两个GB/T276-94 深沟球轴承型号为6000-2Z 进行约束, 见图8,以保证蜗杆在圆周方向上顺利转动, 在其他方向上不产生相对转动或相对滑动,提高涡轮蜗杆之间的传动效率。 图9 为桌面安装模型图。
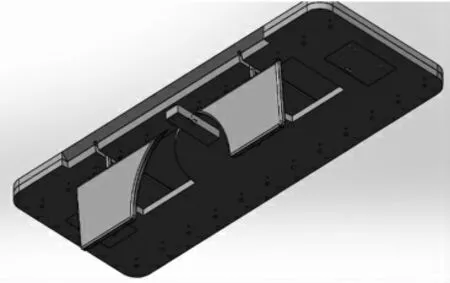
图9 桌面安装模型图
6 电机选型
由于要保证手托升起速度控制在15s 左右, 不能太快也不能太慢,太快容易造成事故,太慢则会影响用户体验感。 因此传动装置选择可以实现较大减速比的蜗轮蜗杆装置,但是由于桌面厚度限制,蜗轮蜗杆的减速比控制在1:25 之内, 否则桌面的厚度将多厚。 需要一减速电机控制转速, 初选JGA25-370 型号电机, 电机额定电压12V,额定电流0.33A,额定功率3.96W,额定转速50r/min。
7 控制系统设计
控制系统主要有两个功能, 一个是完成对2 个减速电机的正反转控制,带动手托板翻出或收回;二是通过光敏传感器判断办公人员的工作时间, 如果工作时间过长则发出休息提醒。
控制器使用Arduino Mega 2560 控制板, 如图10 所示,其传感器输入口和控制输出口较多,便于系统扩展,Mega2560 采用USB 传输方式进行和电脑连接,其内部自带USB 转换窗口模块,只需电脑安装Arduino 开发软件后调试开发环境,即可实现电脑与单片机系统的数据互联。
由于电机额定功率和单片机工作电压分别为12V 和5V,因此采用220-12 直流适配器和MB-102 电源板双路输出模块如图11 所示, 分别给电机和单片机单独供电,以保证电压和电流的稳定性。MB-102 电源双路输出模块用6.5~12V 直流电源直接供电,通过模块转化,输出双路5V 以及双路3.3V 共四路电源,给剩余模块进行供电。

图10 Mega2560 控制板

图11 MB-102 实物图
电机控制模块主要由四个型号为IRFS3607 的MOS管构成H 桥电路实现电机正反转控制, 使用IR2104 芯片作为MOS 管驱动,3607MOS管可经过的最大电流为80A,最大电压为75V。 同时使用了高速光耦做pwm 信号隔离,单片机通过对IR2104 芯片的控制,从而对单片机信号进行放大,使得H 桥控制电路中连接在对角线上的两个MOS 管信号同时导通, 使得电机正向转动,同样的工作原理,当单片机控制信号变换,则另外两个MOS 管导通,实现电机反转控制。 用户操作时可以通过红外遥控器发出的红外信号,使单片机产生电机自动控制正反转的信号, 从而驱动IR2104 芯片, 进而驱动MOS 管导通和关断,实现电机进行正反转控制。
桌面上还设计了员工疲劳程度提醒模块, 主要由蜂鸣器、光敏模块和定时器构成。光度敏感模块用来感知周围光的亮度,当周围光的亮度没有完全达到D0 口设定的阈值时, 或当周围光被完全屏蔽时,D0 口会自动输出3.3v 高电平。 如果周围光的亮度超过设置的阈值,D0 口将自动输出0v 低电平。 D0 输出直接连接到一个单片机输入引脚上,单片机即可以自动检测周围光的亮度高低。由此来检测办公桌旁是否有人。 当光敏模块检测到光线变暗时,反馈给Mega2560 单片机,单片机立即启动定时器1 进行定时, 当定时器1 定时完成时启动蜂鸣器对用户进行休息提醒,若此期间光敏模块检测到光线变亮,则单片机启动定时器2 模块,同时暂停定时器1 的计时,若定时器2 定时完成则清空定时器1 的计时; 当定时器2启动时, 光敏模块检测到光线变暗, 则定时器2 计时清零,定时器1 继续计时。
8 结论
芯片价格问题: 目前该升降系统控制结构采用Arduino Mega 2560 控制器控制,该控制器虽然IO 接口较多,但价格昂贵。 在后续的系统优化中可以更换为国产2560芯片或国产其他32 位控制芯片,以降低成本,增加利润。
智能提醒功能问题: 目前该办公桌智能提醒功能采用光敏模块, 感知光线强弱进行控制定时器计算工作时间,光敏模块会造成夜晚光线变弱后误开启模式,当前系统的解决方法是在达到员工工作时长, 报警之后需要员工将光线变强即离开手托一段时间系统才会重新计算员工工作时间, 这样会造成光敏模块在夜间的时候只会提醒一次,但仍不太符合设计要求,所以需要配合其他模块或更换为压力传感器模块实现提醒功能。
材质问题:目前办公桌大部分材质为钢铁材制制成,造成办公桌重量较重在挪动的时候不太方便, 同时目前办公桌的结构较为零散,配合容易出现间隙,后续优化方案中,可以将一部分结构设计成整体,达到办公桌零部件数量减少,装配难度降低的目的。
猜你喜欢
课堂内外(初中版)(2022年3期)2022-04-14
山东陶瓷(2021年5期)2022-01-17
快乐语文(2021年11期)2021-07-20
中国新闻周刊(2021年22期)2021-07-16
陕西理工大学学报(自然科学版)(2020年6期)2021-01-15
装备制造技术(2020年4期)2020-12-25
设备管理与维修(2020年20期)2020-11-17
组合机床与自动化加工技术(2018年3期)2018-04-03
光学精密工程(2016年5期)2016-11-07
云南中医学院学报(2015年2期)2015-07-31
