
基于数字仿真的星载可见光探测器可靠性研究
2021-04-12 02:23王俊峰赵晶晶刘庆海王云锋
机电产品开发与创新 2021年1期
王俊峰, 熊 笑, 赵晶晶, 刘庆海, 李 昊, 王云锋
(1.北京卫星环境工程研究所, 北京 100094; 2.北京空间飞行器总体设计部, 北京 100094;3.中机生产力促进中心, 北京 100044)
0 引言
星载可见光探测器的作用是, 通过在轨实时监测反推发动机喷口附近的可见光谱段羽流, 对探测到的可见光图像进行处理、存储和传输,实现在轨监测航天器的空间环境,获取反推发动机排出气体的羽流时空分布,为羽流的方向、流速、大小等参数的定量计算提供参考,从而为羽流污染预警提供环境探测数据, 进一步获得航天器在轨环境与受到的羽流污染间关联性。
目前, 国内尚未有关在轨实时监测反推发动机喷口附近的可见光谱段羽流的公开报道。 同时, 在设备强刚度、小体积、低重量的工程约束下,需要实现对在轨光谱、流速、方向尚不明确的喷出羽流的准确探测,因此对星载可见光探测器的光学和力学性能提出了更高的要求。 星载可见光探测器需要针对可见光谱段羽流成像开展光学系统研制,其可靠性有待评估,本文主要从抗力学环境设计的角度予以仿真分析和评估。
结合卫星平台对探测器布局的工程约束, 星载可见光探测器需满足以下要求:①要实现在轨实时监测;②探测的成像质量(含球差、传递函数、畸变网格等)满足探测要求,与羽流的各项参数匹配;③探测距离约500mm;④满足卫星平台对探测器的力学性能要求。 通过光学系统设计满足要求①~③的探测需求,通过结构设计满足要求④。 因此, 为保证可见光探测器在任务期内完成指定功能,开展探测器的光学设计、结构可靠性设计和抗力学环境设计, 并基于数字仿真开展光学仿真和有限元仿真验证[1-3]。
1 设计要求与约束
本探测器具有一定创新性,主要体现在:光学系统为本次探测任务专门设计且国内未见公开报道; 力学性能在工程约束下尚有待验证。 故本文重点关注该探测器的光学性能和力学性能。
1.1 光学设计约束
由于卫星平台对星载可见光探测器布局的工程约束,该探测器可实现探测距离约500mm,待探测羽流流速最大为7.2km/s,见图1。
1.2 机械接口设计约束
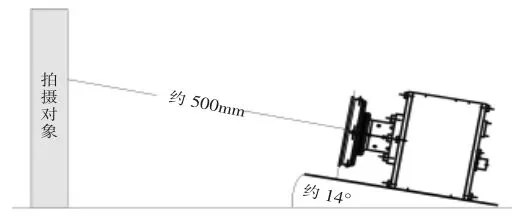
图1 安装位置示意图Fig.1 The diagram of position of the detector
机箱与舱壁直接安装。安装面应平滑不得有突起物,与支架接触区必须满足平面度不得低于0.1 mm/100mm×100mm。
1.3 力学性能设计约束
为避免星载可见光探测器的模态与航天器平台发生耦合, 造成破坏, 星载可见光探测器的基频要求大于100Hz; 为避免星载可见光探测器在经受准静态过载、瞬态载荷、噪声等动力学环境中受到损伤,影响在轨工作,其强度安全裕度要求大于1。 其中,安全裕度定义如下:

式中:M—安全裕度;Sa—许用载荷或其对应的许用应力;Se—鉴定载荷或其相应的应力。
2 光学部分设计与仿真
2.1 系统功能与组成
星载可见光探测器集成了探测、处理、存储和传输等多个功能,需要对内部布局、走线等总体状态设计完毕后再细化各零件设计,其关键为成像系统的设计,需要在光学性能、机、电、热、力等多种耦合约束下实现复杂的设计与分析。
星载可见光探测器的系统组成如图2 所示, 主要包括光学组件,结构组件和电子学组件三部分。
结构组件主要包括镜头结构及壳体结构,为电子学组件和光学组件提供支撑和防护。
光学组件用于接收目标发出的光信号,将其成像于图像传感器上,获取光学影像。光学系统结构如图3 所示。

图2 产品组成示意图Fig.2 Components of the product
电子学组件主要由成像板、 处理板和电源接口板构成。 其中, 成像板提供CMOS 图像传感器的外围配置电路;处理板使用FPGA驱动CMOS 探测器输出图像数据并进行图像处理、 打包发送输出; 电源接口板为处理板、 成像板提供需要的电压, 并将处理板发送的信号通过LVDS 差分芯片转换成标准信号输出。
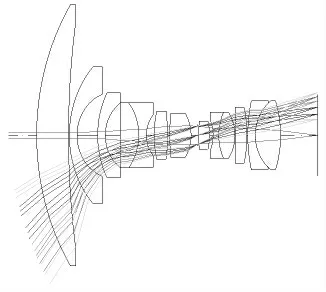
图3 光学系统结构图Fig.3 The structure of optical system
2.2 成像质量评价
光学系统成像要求清晰度高,且物像相似、变形小,其评估指标主要包括球差、像散、传递函数、畸变等。通常还需要对摄像距离进行分析校对, 确认调制传递函数满足成像要求。上述指标均直接影响成像质量,任何一项不满足成像要求都会降低光学系统的可靠性, 从而影响任务成败。 因此,本节对各指标依次开展仿真计算与评估。
(1)球差、像散曲线。 球差,亦称球面像差,轴上物点发出的光束,经光学系统以后,与光轴夹不同角度的光线交光轴与不同位置,在像面上形成圆斑,从而形成球差。像散是轴外像差的一种, 指发光物点补在光学系统的光轴上,导致发出的光与光轴有一定倾斜角,经透镜折射后汇聚不到一个点上,导致成像不清晰,产生像散。 两者均直接影响成像清晰度。 球差、 像散曲线如图4所示,可见系统球差得到较好的校正,像散得到较好控制。
(2)光学传递函数曲线。 光学传递函数是以空间频率为变量,描述了成像过程中光学成像系统对于各种空间频率成分的传递性能,也是对空间频谱的滤波变换, 直接反映了成像质量。 图5、图6 给出了物距为无限远时的调制传递函数(MTF)曲线,表1 给出了90lp/mm 时传递函数的值。 从图中可以看到,中心视场的传递函数均可保持在0.3 以上(90lp/mm),保证了较高的成像清晰度;边缘视场MTF 则可在40lp/mm时保持于0.3 以上。
(3)畸变。畸变是由于垂轴放大率在整个视场范围内不能保持常数引起的。 直观表现为,对方形物体成像时,四周出现卷翘或膨鼓的现象。任何光学系统均存在畸变,但星载可见光探测器需要控制畸变以保证成像质量。 光学系统靠近中心视场产生桶形负畸变, 边缘产生枕形正畸变,畸变曲线如图7 所示,成像效果示意图见图8。 视场畸变设计理论绝对值小于4.5%。
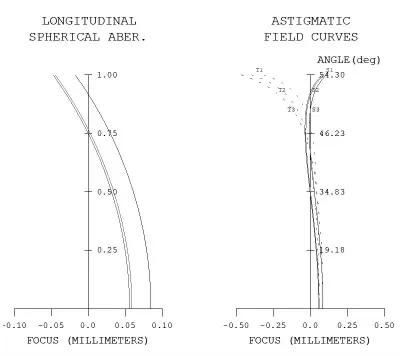
图4 球差和像散曲线Fig.4 The curves of spherical aberration and astigmatism
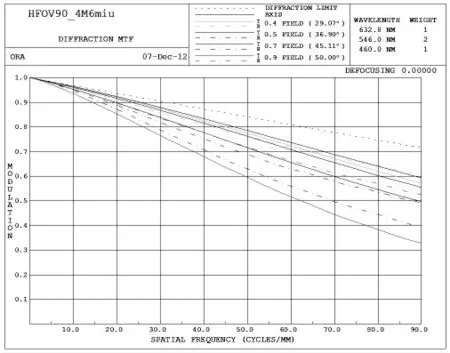
图5 物距无穷远传递函数曲线(中心视场)Fig.5 The curve of transfer function of object distance of infinity (central field of view)

图6 物距无穷远传递函数曲线(边缘视场)Fig.6 The curve of transfer function of object distance of infinity (edge field of view)
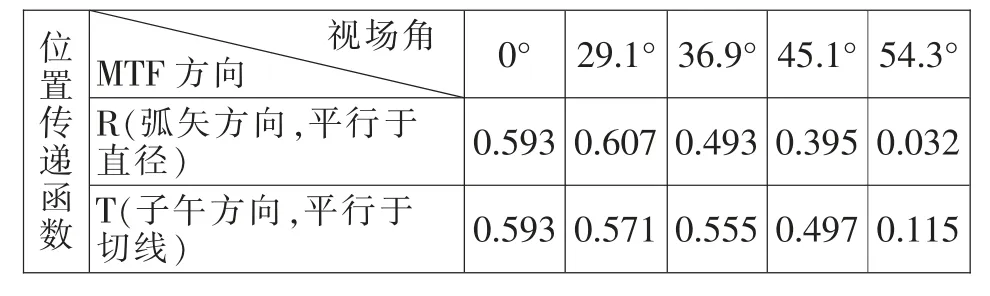
表1 传递函数Tab.1 The transfer function

图7 畸变曲线Fig.7 The curve distortion

图8 畸变网格仿真Fig.8 Simulation of grid of distortion
(4)摄像距离分析。摄像距离为被探测物体与镜头的距离。如图1 所述,星载可见光探测器因航天器的工程约束被布置于距离反推发动机500mm 左右的平台上。 镜头焦距、 相对离焦量与摄像距离之间的关系将直接影响MTF,从而影响图像清晰度。
当镜头对无穷远处调焦时,利用公式(2)可得有限物距成像时对无穷远成像时的相对离焦量x′:

式中:f′—镜头焦距5.5mm;x—物距。
当以0.8m 物距对焦时,不同物距时的相对离焦量在表2 中给出。
可知若以0.8m 物距对焦, 则物距0.36m~∞的范围内相对离焦量未超出一倍焦深(0.046mm),可以清晰成像,满足0.4m~5m 清晰成像技术要求。
此时物距0.4m 和5m 处的MTF 曲线分别如图9 和图10 所示。
可以看出, 当以0.8m 处为对焦距离时, 物距1m~5m范围内在90lp/mm 处中心视场MTF 优于0.4, 仅图像边缘位置清晰度有所下降,其影响可以忽略。

表2 有限物距对0.8m 物距的相对离焦量Tab.2 The relative defocus of object distance 0.8m with finite object distance

图9 物距0.4m 时的MTF 曲线(0.8m 处对焦)Fig.9 The MTF curve at object distance of 0.4m (focus at 0.8m)

图10 物距5m 时的MTF 曲线(0.8m 处对焦)Fig.10 The MTF curve at object distance of 5m (focus at 0.8m)
3 有限元动力学仿真
为了考察工况对光学部分中镜头结构的影响情况,对其进行模态分析、随机振动分析、正弦扫描频率响应分析,有限元分析模型如图11 所示。

图11 有限元分析模型Fig.11 The FEM model
3.1 模态分析
通过模态分析,可以获取基频, 了解探测器的振型。 如果探测器体积、重量过大,影响了航天器的振型, 还需要开展耦合分析。 表3 提取了前6 阶固有频率,一阶固有频率为398.5Hz,刚度满足要求。其中,振型均为电路板起振,振动方向沿X 方向,属于局部振型,不影响整机性能。 因此,在随机振动分析、频率响应分析中重点关注X 方向的受力情况。

表3 整机模态分析结果Tab.3 The result of modal analysis of the detector
3.2 随机振动分析
通过随机振动分析, 验证星载可见光探测器是否能经受随机振动环境下的强度考核。随机振动试验条件如表4 所示。 整机X 向随机振动形变分析结果如图12 所示。
分析可知整机在X、Y、Z三个方向上随机振动的最大应力分别为11.55MPa、8.5MPa、5.3MPa, 均远小于主要结构件材料2A12-T4 的许用应力275MPa、电路板的96.5MPa、紧固件的许用应力895MPa。
根据公式(1),取X、Y、Z 三个方向的最大应力值, 取铝合金、电路板、紧固件三者最低许用应力值,获得最小安全裕度,有:
可见, 安全裕度远大于1。 因此通过以上分析,可认为整机能够通过力学环境试验条件要求的随机振动试验。

表4 随机振动环境Tab.4 The random vibration environment
3.3 正弦扫描振动分析
通过正弦扫描振动分析,验证星载可见光探测器是否能经受低频瞬态环境下的强度考核。 正弦振动条件如表5 所示。 整机X 向正弦振动应力分析结果如图13 所示。
分析可知,整机在X、Y、Z 三个方向上正弦振动的最大应力分别为1.07MPa、2.5MPa、1.4MPa,均远小于主要结构件材料2A12-T4 的许用应力275MPa、 电路板的96.5MPa、紧固件的许用应力895MPa。

表5 低频正弦振动环境Tab.5 The sine vibration environment at low frequency
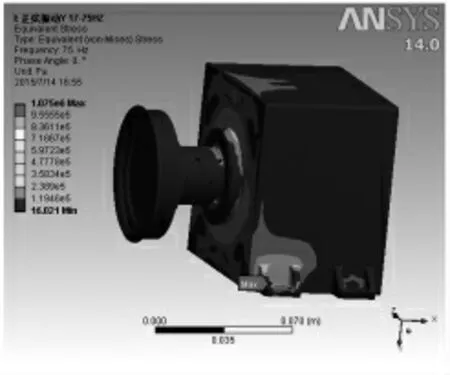
图13 整机X 向正弦振动应力分析结果Fig.13 The result of stress of vibration analysis of the detector at direction X
根据公式(1),取X、Y、Z 三个方向的最大应力值,取铝合金、电路板、 紧固件三者最低许用应力值,获得最小安全裕度,有:

可见,安全裕度远大于1。 因此通过以上分析,可认为整机能够通过力学环境试验条件要求的正弦振动试验。
4 总结
星载可见光探测器在轨实时监测反推发动机喷口附近可见光谱段羽流, 其创新性主要体现在光学系统的独特设计与兼顾力学性能。作为新研制的光学探测器,其可靠性有待于在数字仿真的基础上予以验证成像质量与抗力学环境设计。 本文通过仿真计算球差、像散、光学传递函数等关键指标, 验证了光学系统满足羽流光学探测要求,通过有限元随机振动、正弦振动仿真,验证了结构可靠性和抗力学环境能力。
文中设备在辐照、 绝缘等性能上, 仍有较大提升空间, 将来可逐步减少铝合金材料占比, 增加复合材料应用, 也能同时在满足力学约束的前提下, 进一步优化设计,实现产品轻小型化[4-6]。
猜你喜欢
世界最新医学信息文摘(2022年5期)2022-12-07
水下无人系统学报(2022年1期)2022-03-16
中学生数理化·八年级物理人教版(2022年11期)2022-02-14
锦绣·上旬刊(2020年3期)2020-06-08
国际眼科杂志(2019年10期)2019-10-12
上海交通大学学报(2019年4期)2019-05-08
理科考试研究·初中(2018年10期)2018-12-11
机电产品开发与创新(2018年5期)2018-10-16
艺海(2018年3期)2018-05-17
化工学报(2016年12期)2016-12-14
