G-SVD:一种基于高斯卷积和SVD的暗通道去雾算法
2021-04-12 10:12王诗毅姚信威
小型微型计算机系统 2021年4期
王诗毅,姚信威,姚 远
(浙江工业大学 计算机科学与技术学院,杭州 310023)
1 引 言
近年来,我国出现雾霾天气的几率大大增加,在雾霾条件下采集图像,原本较低的像素值被增大,而原本较高的像素值被降低,造成图像对比度的退化,给自动驾驶、目标检测等领域带来了极大的困难.因此,图像去雾技术具有重要的应用价值,已经成为图像视频处理[1]、计算机视觉和计算机图形学等领域的热点问题.
基于先验的暗通道去雾算法[2]是当前主流去雾算法模型之一,有大量学者对该算法进行了改进.面对暗通道去雾效果在特殊情况下能见度低的缺陷,Pal等人[3]使用三边滤波器(Trilateral filter)增强图像能见度,再使用S型(Sigmoid)传递函数增强图像对比度.Halmaoui[4]和Li[5]使用直方图均衡化增强图像可视化效果,其中前者使用模拟退火算法优化参数,而后者利用雾霾的呈现淡黄色原理,采用自适应直方图信道均衡自动调整参数.上述直方图方法仅仅关注图像亮度及对比度,不能得到图像的深度信息,因此往往会导致图像颜色发生畸变.He[6]等人使用收缩邻域的保边约束,使输出图像保持最大的平滑度,再通过HSI颜色通道上对图像进行处理,从而提高图像的有效性和可靠性.而对于暗通道的场景通透率和全局环境光的预估,Huang等人[7]利用导频滤波器获得非天空模糊图形的大气通透率,再利用天空、白云或者别的明亮区域的各类图像分类分析,预估天空各个部分的大气通透率,然而这类融合滤波方法难以保留图像细节.Zeng等人[8]提出了一种有效的正则化方法,通过增加场景辐射约束来求场景通透率.Cheng等人[9]则通过暗通道去雾模型,提出了一种处理时变消光系数性质的变分框架,并通过对观测到的亮度曲线分段函数拟合来估计全局环境光.Zhu[10]则提出了一种融合亮度和暗通道先验(Fusion of Luminance and Dark Channel Prior,F-LDCP)的算法,该算法将基于亮度模型和暗通道先验模型的传输值融合在一起,从而得到场景通透率.Chen等人[11]在暗通道的基础上引入局部暗通道,并对其进行映射处理,得到大气光强度粗值,再用导向滤波优化粗值,最后使用全变差正则化方法对初始图像优化,增强图像清晰度.秦等人[12]首先使用原暗通道模型预估全局环境光,在计算场景通透率过程中引入自适应优化计算以实现去雾.谭等人[13]在预估场景通透率后联合中值滤波和双边滤波对其细化,以满足天空区域的去雾处理.黄等人[14]使用深度学习方法去雾,利用自编码网络得到雾特征序列,再使用深度神经网络通过序列获得场景通透率,最后使用大气散射模型恢复无雾图像,然而使用深度学习方法往往需要大算力处理器和GPU,且往往耗费时间较长.
暗通道去雾算法所有推导都建立在全局环境大气光A已知的基础上,通常采用亮度大小前0.1%的像素点作为全局环境光,然而这仅仅对环境较亮的情况下结果有效,而在雾浓且雾不均匀的情况下,去雾效果往往不尽人意.其次,由于暗通道去雾算法存在景深变化,会在该变化边缘处产生一条较为明显的过渡带,出现块状效应[6].为解决块状效应和浓雾效果差这两个问题,本文提出了一种基于高斯卷积和SVD的暗通道去雾算法,即G-SVD,提升图像质量和能见度.实验结果表明,该算法可以较好的抑制块状效应,保留图像的边缘细节.通过与其他主流算法相比,本文算法在各个性能指标上的平均值均高于其他算法,说明该算法具有稳定性强,不易失真和不易产生颜色畸变的优点.
2 暗通道去雾算法
He[2]等人对大量户外有雾和无雾环境分析,提出了暗通道去雾算法.通用模型为科希米德公式(Koschmieder′s Law)[15]:
L(u,v)=L0(u,v)e-kd(u,v)+Ls(1-e-kd(u,v))
(1)
其中,L(u,v)为肉眼或者相机观测到的对象亮度,L0(u,v)为对象的原本固有亮度,(u,v)为各个像素点的坐标,Ls为大气光强,e-kd(u,v)为原本固有亮度的随着距离d(u,v)的增加而产生的指数衰减[2].在计算机图像和图形学中,公式(1)简化为:
I(x,y)=J(x,y)t(x,y)+A(1-t(x,y))
(2)
其中,I(x,y)为肉眼和相机看到的图像,J(x,y)为无雾图像,t(x,y)为场景通透率,A为全局环境大气光.
根据暗通道去雾算法原理,在彩色图像的RGB 3个通道中,大量统计表明,存在一些像素点值特别低,即该像素点的光强度较低:
(3)
公式(3)中C为RGB 3个通道,(x,y)为像素点坐标,因此暗通道即为在3个通道中像素点的最小值.
将公式(2)变形为:
(4)
对公式(4)两边同时取最小值:
(5)
根据暗通道理论,将公式(3)带入公式(5),得到:
(6)
(7)
最终得到复原原图的公式为:
(8)
由于t(x,y)过小,则会造成图像失真,因此引入t0保证图像的可显示性.在公式(8)中,I(x,y)是已知的,要获得J(x,y),则必须估计场景通透率t(x,y)和全局环境大气光A.
3 G-SVD去雾模型
3.1 估计环境大气光A
由于采用单一值作为全局环境光A,未考虑到局部环境下的环境大气光仍可能不同,因此本文采用了滑动窗口的模式预估每个像素点的环境大气光,滑动窗口大小3×3,每次滑动距离为1,如图1所示.
定义该滑动窗口中心点的环境大气光A为:
A=A0+Am
=min(AR,AG,AB)+Am
=min(IR⊗GK,IG⊗GK,IB⊗GK)+Am
(9)
公式(9)中,A0为通过高斯卷积方法预估的环境光,Am为偏差系数,IR,IG,IB分别为3×3的RGB图像块,⊗表示为卷积操作,GK表示为高斯卷积核(Gaussian convolution kernel).具体操作如图2所示,将3×3的滑动窗口分解为R、G、B 3个通道,并分别与高斯卷积核卷积相乘再求和,根据3×3滑动窗口的位置坐标,带入高斯距离公式:
(10)
最后进行归一化处理,使得9个坐标值和为1,得到最终的高斯卷积核.由于使用该方法预估环境大气光A偏小,会导致图像整体亮度偏低,因此引入偏差系数Am(公式(9)),通过大量实验验证,Am范围在0.2-0.28区间效果最好.

图2 高斯卷积预估环境光示意图Fig.2 Schematic diagram of Gaussian convolution estimation of ambient light
3.2 奇异值分解重构图像
基于暗通道模型去雾后会整体颜色较暗,且存在大量冗余信息和噪声,降低了图像含有的信息量,因此使用奇异值分解(Singular Value Decomposition)以用于图像去噪和图像重构.
假设矩阵A维度为m*n(m>n),根据SVD原理得到:
(11)
其中U和V分别是AAT和ATA的特征矩阵,而
(12)
σ1≥σ2≥σ3≥σ4≥…>0
(13)
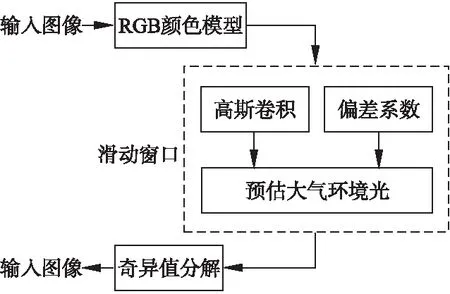
图3 G-SVD算法流程图Fig.3 G-SVD algorithm flowchart
根据公式(11),我们可以使用前k个奇异值重构图像,减少图像噪声,提高清晰度.若k取值较大,则会导致图像去噪效果较差,保留过多冗余信息,而k取值较小,则会丢失原本的图像细节和原有信息,大量试验后,本实验中k均取值为图像宽的60%,此时图像有效信息保留最完善.整个G-SVD去雾算法流程如图3所示.
4 实验结果
4.1 实验环境
为验证本文所提方法的可靠性和有效性,本文实验在Intel(R)Core(TM)i5-4288u CPU,主频为2.6GHz,运行内存为8GB的PC机上运行,实验使用Matlab 2015a用于仿真.
4.2 主观视觉评价
为验证该算法的普适性,选取多种环境下的有雾图像(森林、小河、城市、天空和鹿)进行实验,此外,有雾图像的雾强度等级分别为:清雾、雾、大雾、浓雾和强浓雾,以丰富实验对象.目前去雾主流算法为基于去雾物理模型和基于图像增强算法两种.其中He算法[2]为基于去雾物理模型的去雾算法代表,通过提出暗通道去雾模型提升图像可见度;而Wang算法[16]为基于图像增强算法的去雾代表,其采用多尺度Retinex图像增强以去雾.为验证本文算法性能,将G-SVD与He算法[2]、Wang算法[16]对比,结果如图4所示.其中图4(a)为原图,图4(b)为采用本文算法G-SVD的去雾效果图,图4(c)为He算法[2]效果图,图4(d)为Wang算法[16]的去雾效果图.如图4所示,利用He[2]去雾算法处理后,整体色彩清晰度不足,局部区域甚至出现了块状效应(见图5),通过局部放大图可以发现,第1行森林图像块状效应明显,导致视觉效果欠佳,并且在第2行小河图中,也出现了明显块状效应,颜色偏暗,细节保留不明显.而本文算法G-SVD在同一位置并未出现块状效应,且有效地改善了景深发生突变地方的色彩失真.此外,Wang算法[16]在第2行和第3行在天空区域出现了明显失真,并出现了色带,使得能见度不足.在第5行鹿图像中,本文方法对于图像中央远处树木的保留效果较好,而He算法[2]远处细节则完全消失.总体来说,本文算法相比较于其他两种算法,局部细节保留更好,并未出现明显失真现象,有效解决了He算法[2]中的块状效应.

图4 主观分析去雾效果Fig.4 Subjective analysis of defogging effect
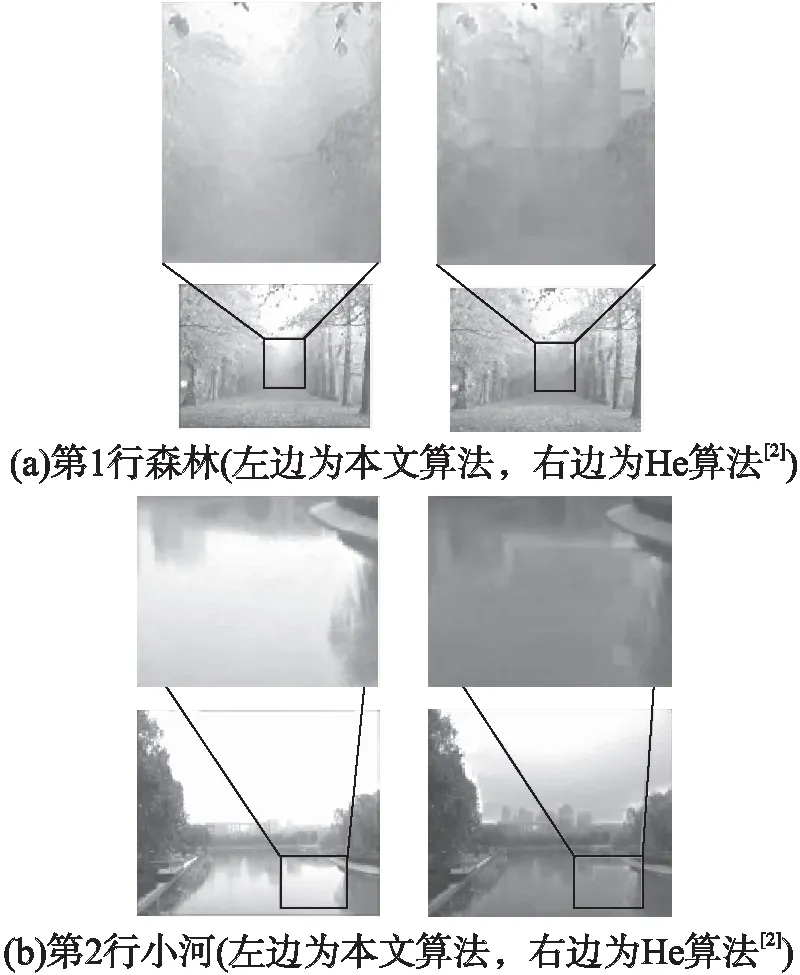
图5 改进算法和原算法局部放大图对比Fig.5 Comparison of local magnification of two algorithms
4.3 客观指标评价
本节从信息熵[17]、峰值信噪比(Peak Signal-to-Noise Ratio,PSNR)[18]和结构相似性(Structural Similarity,SSIM)[19]3方面对下面9张浓雾图像进行定量分析,实验结果如图6所示.从上至下每一行的雾浓度呈递增趋势,以丰富该算法对不同的实验条件的效果和影响,验证该算法的适应程度.
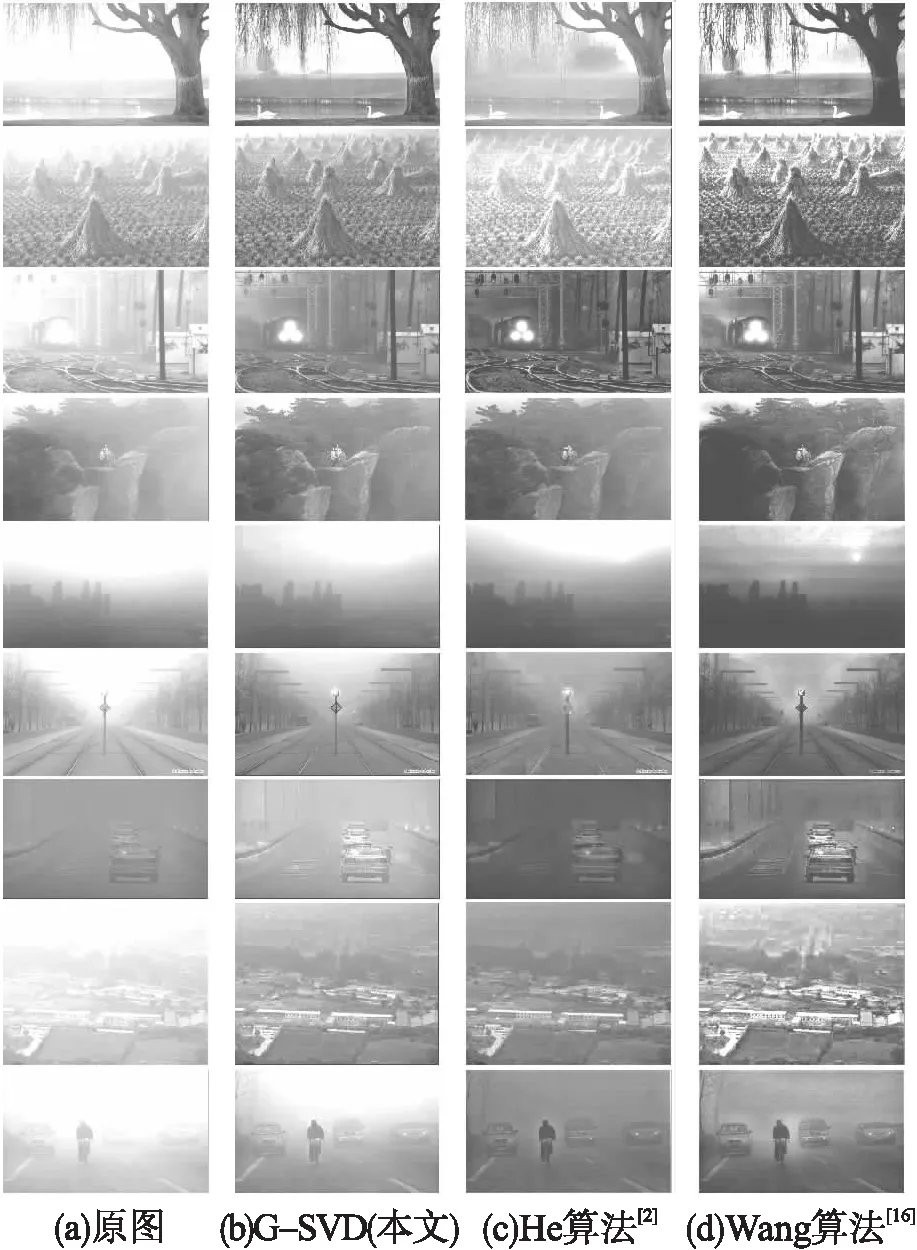
图6 定量分析去雾效果Fig.6 Quantitative analysis of defogging effect
信息熵[17]是对图像信息量的度量,来评价图像质量的好坏,信息熵越大,则说明图像包含信息量越高,图像复原质量越好,信息熵公式为:
(14)
其中,pi是像素值i出现的概率.图6的信息熵值如表1所示,G-SVD得到的复原图像信息熵平均值最高,相比较于原暗通道去雾算法[2]信息熵提升了0.26,而和Wang算法[16]相比高出约0.07.
峰值信噪比[18]是通过对比纯净图像I和噪声图像K,衡量纯净图像的重建质量方法,如公式(15)所示:
(15)
其中MSE表示为均方误差:
(16)
MSE越小,PSNR越大,则图像失真越小,图像质量越高,如表2所示,图6的测试图像在本文算法中PSNR平均值高于其他两种算法.其中,本文算法相较于He算法和Wang算法PSNR值提高了近4.4,大大的提升了去雾图像的能见度,且去除了冗余噪声.
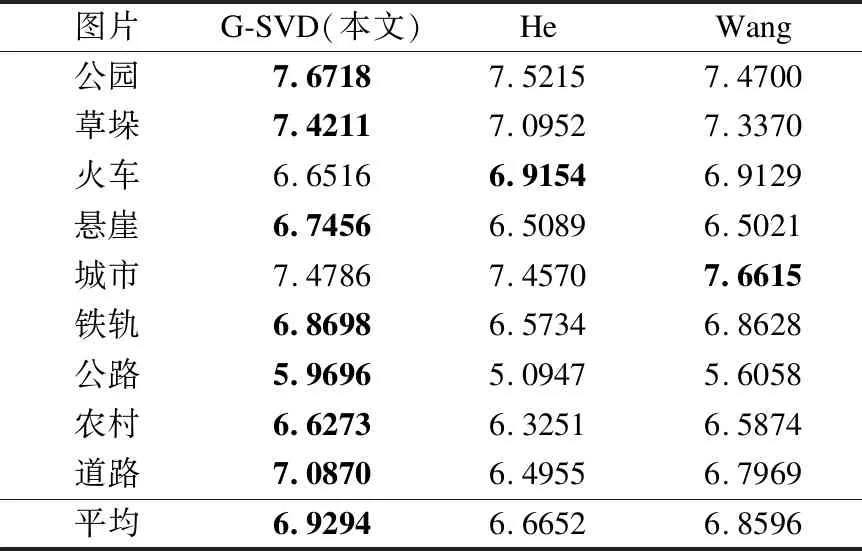
表1 不同算法的信息熵Table 1 Information entropy of different algorithms
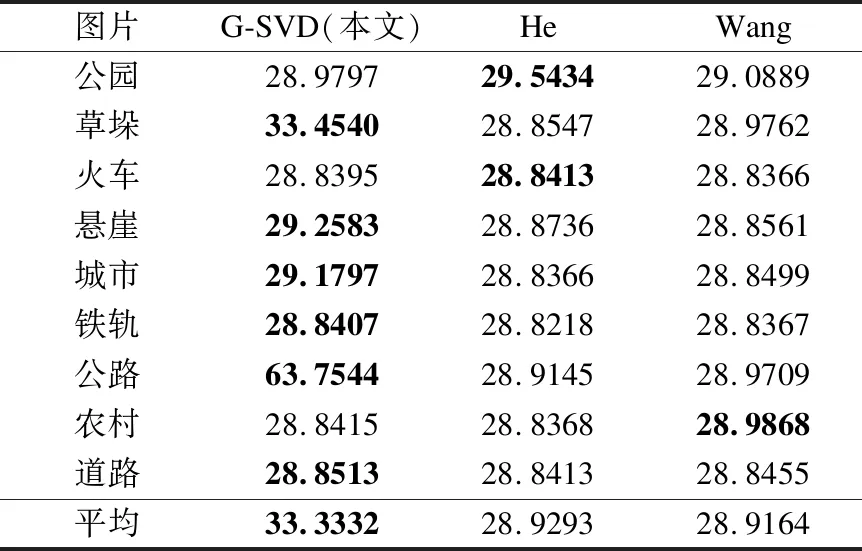
表2 不同算法的峰值信噪比(PSNR)Table 2 PSNR of different algorithms
结构相似性[19]用于评价图像结构信息的保留程度,可以解决PSNR和MSE无法衡量图像结构相似的问题,如公式(17)所示:
(17)
其中μx和μy表示图像的X和Y的亮度均值,而σx和σy表示图像X和Y的标准差,C1和C2为常量.SSIM越大表示图像去雾效果越好,原图重要信息保留程度越高.结果如表3所示,本文算法的SSIM平均值分别高于其他两种算法0.15和0.3.
综合上述3项指标,可以认为提出的算法在信息保留、重建图像质量和结构信息的保留程度上,比其他两种方法效果更优秀,适应性更强,同时,在处理浓雾效果中,也仍保留了较多的细节,并有效的避免了He算法中的块状效应以及Wang算法中的图像失真和颜色畸变.
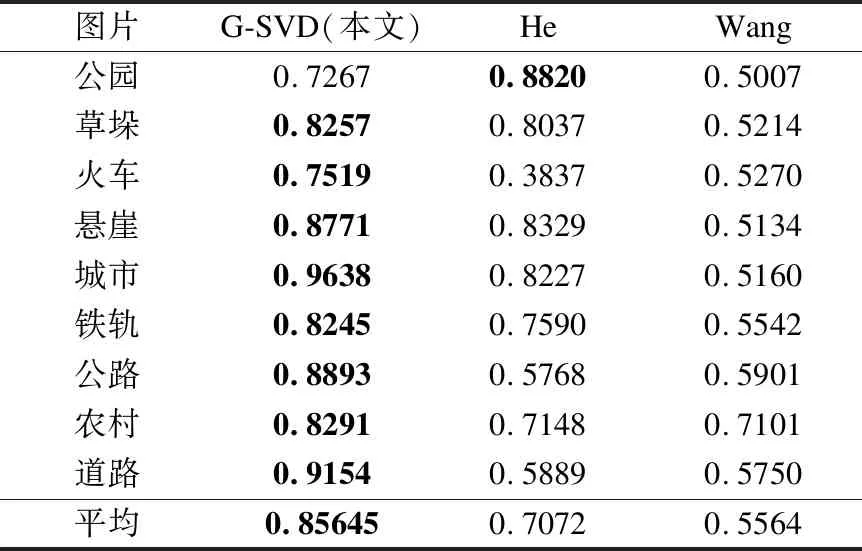
表3 不同算法的结构相似性(SSIM)Table 3 SSIM of different algorithms
4.4 算法速率分析
表4给出不同去雾算法对各个尺寸的所耗费时间对比.从各算法执行时间可以看出,本文算法G-SVD在像素范围为240×210-600×450的图像处理效率均高于其他3种算法(Chen[11]、Tarel[20]和Meng[21]),但是随着尺寸的增大至800×600时,本算法的耗时则高于Chen和Meng算法.分析其原因在于本文算法需要对图像进行滑动窗口处理,遍历图像所有像素点,因此导致算法时间复杂度高于其他两种算法.此外,由于本文算法还需对图像进行SVD矩阵运算,这也间接导致算法耗时的增长量高于其他算法.简化矩阵运算,降低算法的时间复杂度,这也将成为下一阶段的研究方向及重点,以应用在视频处理中[22].
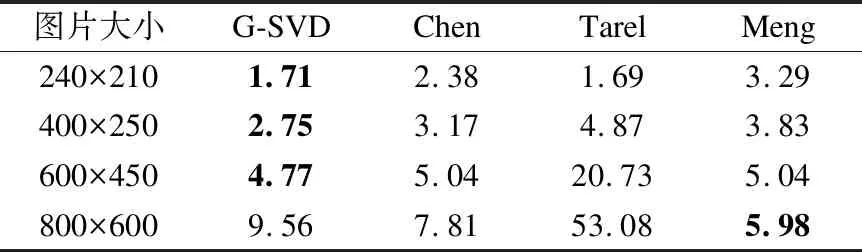
表4 不同算法的耗时对比(时间单位:秒)Table 4 Time consuming comparison of different algorithms(time unit:s)
5 总 结
本文提出了G-SVD去雾算法,它采用基于滑动窗口的高斯卷积来预估各个像素点的环境大气光,并引入偏差系数提高去雾图像亮度,再采用奇异值分解去除冗余噪声,从而有效的去除原暗通道去雾算法的块状效应,并通过信息熵、PSNR和SSIM3个方面定量分析该算法的提升.实验结果表明,G-SVD算法可以有效去除块状效应且浓雾处理效果较为理想.但是该算法的去雾结果仍然存在着细节模糊、部分色彩失真等缺陷,此外,随着图像尺寸增大,算法时间复杂度较大等弊端也显现出来,这将成为未来研究的主要方向.而随着人工智能、5G通信等技术的发展,下一步也将去雾算法进一步改进,融合实时视频传输[23]等技术,实现实时去雾.
猜你喜欢
保健与生活(2020年13期)2020-07-24
现代电子技术(2018年18期)2018-09-12
软件导刊(2018年4期)2018-05-15
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
电脑知识与技术(2018年35期)2018-02-27
科学家(2017年12期)2017-08-10
课程教育研究·新教师教学(2016年21期)2017-04-12
中国水运(2016年11期)2017-01-04
电脑知识与技术(2016年27期)2016-12-15
小学教学研究·新小读者(2014年5期)2014-05-14