空天车地一体化重载铁路安全保障技术框架
2021-04-09 09:20高一凡王楠楠吴迪迪陈小英
现代交通技术 2021年1期
高一凡, 王楠楠, 吴迪迪, 陈小英
(1. 北京锦鸿希电信息技术股份有限公司,北京 100070; 2. 中国航天系统科学与工程研究院,北京 100044;3. 中车长春轨道客车股份有限公司,长春 130062)
高效运营与安全保障是轨道交通永恒的主题。长期以来,我国轨道交通的高效安全运行面临着多重的压力[1-3],而重载铁路的快速发展更是使其在运营安全、运输效率、基础设备建设、维护等方面面临巨大挑战。
重载铁路日常维护包括每日人工巡查维护、天窗时间内维修、要点维修和大修等;各专业针对运营、安全、设备维护等进行各种检测、监测,产生了海量的、结构多样的数据。如何有效地采集、管理和应用这些数据,是重载铁路高效运营和管理的基础和关键[4-6]。
我国高速铁路装备的运营与安全保障系统主要有列控系统和铁路自然灾害及异物侵限监测系统。列控系统根据地面设备提供信号动态信息、线路参数、临时限速信息和动车组参数,按照目标距离连续速度控制模式监控列车运行,保证列车的运行安全[7-8];自然灾害及异物侵限监测系统能对铁路沿线风、雨、雪、地震及异物侵限等状况进行实时监测、预警、报警,并对异物和地震进行联动安全控制等[9-11]。
现有关于列控信息和自然灾害信息的监测都是通过在地面布设传感器,然后将感知信息通过铁路专网或者公网传输到路网数据中心,数据中心进行数据处理和分析后,将预警信号发送给车辆段或者列车乘务员。该监测方式是对一个区域局部信息的感知和处理,难以实现大范围、全天候的实时监测,缺乏全局和宏观的决策能力[12-13]。因此,迫切需要建设一套监测系统,突破现有铁路地面监测、预警、网络信息交换现状,实现基于空天车地信息一体化的重载铁路系统运行状态全息化感知与信息集成应用技术,满足重载铁路列车安全运行大范围、全天候、全覆盖、全方位实时监测需求。
基于空天地一体化的监测系统在地球观测、环境监测等领域已经有初步的应用[14-16],在高速铁路的熔岩勘测和山区地形测绘方面也有一定的应用基础[17-19],但是尚未形成完整的、面向重载铁路安全监测和预警的空天车地一体化监测系统。本文建立的基于空天车地一体化的监测系统框架及其典型示范应用,将为未来重载铁路的安全监测提供良好的理论、技术和应用指导。
1 系统总体方案与功能设计
本文针对典型重载铁路的特点,以系统功能和指标体系为主要依据,提出重载铁路运营与安全综合保障系统综合集成体系结构、组成,以及各组成部分的功能、配置、外部接口等内容。
1.1 系统总体功能分析
目前重载铁路的日常维护工作存在两个主要问题:①一线维护人员数量较少,维护线路长,承担责任大;②行车密度大,维修时间严重不足,只能进行小修小补,线路长期处在超负荷运营之中。因此在综合考虑经济成本的情况下,应实现广域大范围的低成本覆盖,通过静态滞空平台(飞艇)进行覆盖的方式具备显著优势,可以解决维护线路长、难以全天候定区域安全监测导致的诸多难题。本课题要求静态滞空平台具备大载荷、长航时、高精度定区域驻空、立体多维态势感知、低成本运维等能力。
由于一般情况下很难到达重载铁路的现场,因此动态滞空平台(无人机)的应用是解决这一问题的有效途径。结合重载铁路的特点,本文提出专用动态滞空平台快速部署、实时监测、操作简易、长航时滞空、远程作业、可靠性高等特点。同时,重载铁路的多源联合观测数据在空间、时间、尺度等方面呈现出多粒度形态,并存在严重的不一致性;多源传感器获得的感知数据具有歧义性和缺失性,监测对象与环境具有多态性、非结构性,因此,需要研究反映多尺度、多域状态信息的关联认知模型,提出状态信息的时空表征,获取关联融合方法,为列车本体安全状态、基础设施和列车运行环境的监测、线路等状况的快速巡检等监视应用需求奠定理论方法基础。
另外,重载铁路的多平台监测信息存在时空维度不同、多元异构等特性,需要进行数据的关联融合。同时,轨道交通状态的生成与演化具有不确定性和跨尺度特性,需要探索不同局部运行状态的耦合机制及演化机理,建立态势的跨尺度时空映射关系模型,解决状态态势跨尺度时空演化涌现这一关键科学问题。重点面向轨道交通系统状态信息的融合处理方法、安全态势的跨尺度演化、多源立体监测系统状态评价与能力涌现展开研究,实现对轨道交通系统的多元、多维、多粒度的实时全息化评估,综合保障轨道交通系统安全运行;同时要求系统在突发事件、突发数据请求等情况下,具备应急保障能力。
综上所述,针对重载铁路大范围实时运营与安全保障对广域立体监测、多尺度监测信息深度融合等的迫切需求,本文将构建空天车地一体化的状态监测与处理技术体系和标准规范,实现系统全方位、全息化的运营与安全综合保障能力。通过引入临近空间飞艇、低空无人机、列车及地面轨旁系统互联互通的专用网络系统,有效整合网络系统中空间和地面两个部分,通过专用网络将原本分散的感知监测能力连接成一体化的专用网络。首次通过空天车地综合组网,实现对轨道交通广域线路、基础设施、在途列车群状态的立体信息获取(看得全)、可信传输(传得好)与精准运管(判得准),从而满足未来轨道交通系统全息化安全保障和运营支持的需求。
1.2 系统整体架构
重载铁路运营与安全综合保障系统按照节点空间分布分为临近空间、空中、车载、地面四个层面,主要包括临近空间平台(专用静态滞空平台)、空基平台(专用动态滞空平台,包括翼型无人机、多旋翼无人机等)、车载监测、地面监测节点以及地面数据中心。
重载铁路运营与安全综合保障系统利用分布于临近空间、空中、车载及地面的专用静态滞空平台、专用动态滞空平台、列车以及轨旁监测节点上加装的监测系统装置,结合地面既有监测系统,共同构成了系统的监测部分,提供列车本体、基础设施(路基、桥梁、隧道等)及运行环境监测,实现轨道交通多尺度多域状态信息的时空一致获取与关联。
针对铁路大范围实时运营与安全综合保障对按需动态组网、任务应急重构、可靠传输等方面的需求,构建空天车地轨道交通专用网络体系构架,实现覆盖列车、地面基础设施及运行环境的空天车地一体化协同组网,支持面向轨道交通运营业务以及应急业务等条件下的快速组网和动态重构,具备大范围轨道交通安全监控大带宽、实时、高可靠的长距离通信传输能力。
系统的数据分析部分通过构建大数据处理平台,运用多维度轨道交通状态信息融合和互操作技术,对多源立体感知数据进行智能分析和挖掘,实现对多元时空大样本数据的有效处理和分析利用,达到安全状态信息深度融合与整体行为的跨尺度演化涌现,从而实现轨道交通状态辨识评价、预测预警与风险分析。
重载铁路运营与安全综合保障系统通过空天车地轨道交通专用网络实现各监测节点立体感知信息的可靠传输与无缝共享,结合轨道交通系统状态信息融合与处理系统对多源数据的智能分析,支撑列车运营安全全方位监控信息的实时传输与预警处理。
2 系统组成部分
重载铁路运营与安全综合保障系统主要由监测子系统、通信子系统和数据处理子系统三部分组成,其中监测和通信子系统的节点包括专用静态滞空平台节点、专用动态滞空平台节点、列车节点、轨旁监测节点及地面通信节点等;数据处理子系统主要是以地面数据处理中心为核心的数据处理和预测预警平台。各子系统通过通信设备和通信链路进行连接,共同完成空天车地一体化轨道交通系统安全保障的功能。
重载铁路运营与安全综合保障系统主要由专用静态滞空平台、专用动态滞空平台、轨道交通系统状态信息实时获取与监测子系统、应急通信子系统、空天车地轨道交通专用网络、轨道交通系统状态信息融合预处理子系统以及既有监测系统组成。
2.1 专用静态滞空平台
本文提出的专用静态滞空平台是针对轨道交通大范围实时运营与安全综合保障系统的要求研制,具有大载荷、长航时、高精度定区域驻空三项核心能力,支持全天候定点广域覆盖,能够解决广域稀疏路网难以全天候定区域安全监测的难题,实现系统全方位、全息化的运营与安全综合保障能力,提供空中平台保障。
专用静态滞空平台主要通过在飞艇平台上安装光电吊舱等遥感遥测设备,对轨道交通基础设施及运行环境的状态进行实时监测,然后将监测数据发送到地面数据中心,对基础设施及运行环境的状态进行实时诊断及预测。
应用场景及监测对象主要包括:列车位置、基础设施状态(线路、桥梁、隧道的状态)、运行环境状态(山体滑坡、塌方、泥石流、水位暴涨等自然灾害;风、沙、雨、雪等自然环境)及异物侵限(落石、动物、车辆、设施、遗留物等)。
2.2 专用动态滞空平台
本文设计的专用动态滞空平台满足快速部署、实时监测、操作简易、长航时滞空、远程作业、可靠性高等要求,支持实现局部增强监视的业务要求。
结合动态滞空平台的高机动性,在无人机上搭载激光雷达和视频监测系统,对轨道现场动静态异物侵限进行识别和预警;对线、桥、隧及轨旁设施等基础设施进行高机动性和高分辨率的状态获取和识别;对线、桥、隧的完整度进行实时检测和分析;对突发事故进行近距离、高精度探测。
翼型无人机所搭载的遥感遥测设备的部分监控数据通过艇载基站实时转发至地面中心;隧道无人机自主飞行完成巡检任务,巡检所得数据使用专用U盘等介质通过专用网络传送或直接拷贝至地面中心;通过无人机搭载的高像素照相设备、红外摄像设备、激光雷达设备等,获取实现远距离、高速度和高分辨率的拍摄,并通过机载的GPS(全球定位系统)和具备实时传图功能的数据链路,将各信息采集状态的视频数据回传到地面站。
2.3 车载监测辅助平台
位置监测辅助平台主要通过卫星导航和惯性导航传感器组合定位方式,实时监测列车的运行位置,其列车定位精度基本满足列车定位需求。
轨道交通车载监测平台监测对象复杂多样,应用的场景非常丰富,本系统选择有代表性的监测对象进行分析。
(1) 列车位置监测。为实现空天车地环境下列车高精度连续无缝定位,采用基于卫星定位的多传感器信息融合组合技术实现列车位置的实时获取与行车监测,突破多传感器紧耦合组合定位核心算法,实现面向线桥隧等多个典型应用场景的测试示范和验证。
(2) 列车关键部件监测。其包括轴箱状态监测、齿轮箱状态监测、牵引电机状态监测、制动系统状态监测、辅助逆变系统状态监测。
(3) 人员状态监测(包括司机状态监测)。
2.4 地面轨旁监测平台
基于地面平台的轨道交通基础设施及环境监测的总体方案如图1所示。
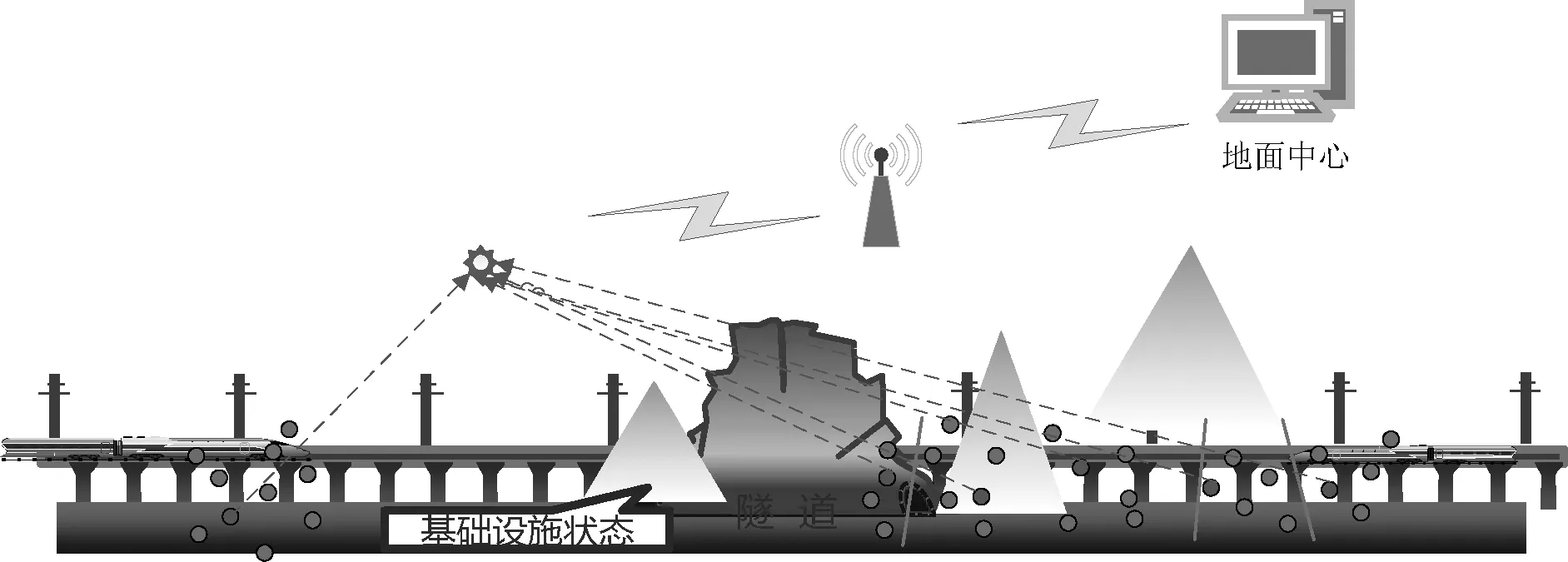
图1 基于地面平台的轨道交通基础设施及环境监测的总体方案
①在轨旁安装视频监控对铁路周边移动物体进行监控与识别分析,对移动物体的类型、距离铁路的距离、分布态势、威胁程度进行实时分析与预警;②在重点位置安装风力风向传感设备,对可能发生大风威胁的区域进行实时监测;③在容易发生沙尘暴的地区安装沙尘覆盖监测系统进行实时监测;④在沿线重点位置安装雨量传感器;⑤在沿线重点位置安装雪深传感器,如条件允许也可和沙尘覆盖监测系统共用一套系统;⑥在桥梁、隧道等基础设施的重点部位安装应力传感系统。
各传感监测系统采集原始数据,在本地进行分析预处理后,再由轨旁数据采集、存储与处理设备统一进行编码与集成,通过轨旁路由网关、无线通信终端、艇载无线通信基站等通信通路将数据传递至地面中心再做深入的分析处理与应用。
2.5 多维度轨道交通状态信息的融合和互操作平台
针对空天车地信息协同的轨道交通运营与安全综合保障系统所涉及的轨道交通列车车体、基础设施以及运行环境等设施设备种类多样、测量数据复杂等问题,研究这些测量数据的接入、归类、筛选、存储方法及数据融合、互操作技术,根据不同应用建立起合理的存储机制和管理办法,建立轨道交通一体化检测监测数据管理平台,多维度轨道交通状态信息的融合和互操作平台,主要包括多源信息的接入、存储、融合处理、交互和安全管理等多个子系统和子功能模块。
2.6 基于大数据的轨道交通状态辨识评价、预测预警与风险分析平台
轨道交通空天车地一体化监测系统数据格式多样,包括报表、文本、图像、视频、音频等非结构化数据。为了综合运用、挖掘分析这些潜在的数据金矿,必须将其按照特定的规则集成存储到数据库,并根据应用方式不同,构建不同的子系统,包括基于大数据的轨道交通状态辨识评价、预测预警与风险分析及平台研制。
研究列车关键部件、列车运行状态、线桥隧等基础设施以及列车运行环境等故障或危险趋势分析及预测模型、运维辅助决策与应急处置方法,建立安全风险综合评价体系。其包括:①列车车体实时监测与告警平台;②基础设施实时监测与告警平台;③运行环境实时监测与告警平台;④系统自身状态实时监测与告警平台;⑤故障趋势分析及预测系统;⑥安全风险综合评估系统。
3 典型应用场景
本章结合朔黄铁路对于空天车地一体化系统监测的需求,使用本系统研究的技术及研制平台,对验证的场景及验证方案进行详细介绍。验证场景主要分为:①基于飞艇的基础设施和列车运行环境监测;②基于无人机的基础设施和列车运行环境监测;③基于轨旁设施的基础设施和列车运行环境监测;④机车运行状态监测;⑤基于地面传感器和卫星的列车位置实时监测;⑥轨道交通系统状态信息获取、融合与决策支持平台;⑦运营与安全综合保障的空天车地信息协同技术平台。
空天车地一体化监测系统在朔黄铁路进行示范应用时,需要满足以下监测和预测的标准:覆盖隧道、桥梁、长大干线等典型应用场景的监测;基础设施监测有效覆盖半径≥300 km;周边环境的典型自然灾害具有大范围监测能力≥100 km;移动体目标的地面位置检测精度≤1 m;巡航监测特定区域与突发事件现场监测预警分辨率≤20 cm。
3.1 基于飞艇的基础设施和列车运行环境监测
基于飞艇的基础设施和列车运行环境监测总体方案如图2所示,安装在飞艇平台上的光电吊舱等遥感遥测设备对监控区域进行实时监控,并将原始数据实时发送至地面中心,由地面中心从原始数据中分析可能影响铁路运营安全的因素。

图2 基于飞艇的基础设施和列车运行环境监测总体方案
其主要监测对象包括:①落石、动物、车辆、设施、遗留物品等引起的侵限事件;②地形地貌;③水文;④桥梁垮塌等较大形变;⑤隧道塌陷。
为了保证对监测对象的覆盖能力和飞艇的持续工作能力,该飞艇的工作环境及指标参数设置如下:飞艇驻留在20 km高空;舱内设备(网关和通信设备)温度 -45 ℃ ~ 50 ℃,气压3 kPa环境下可靠工作;舱外设备(天线)温度-60 ℃,气压3 kPa环境下可靠工作。在实际使用过程中可能会存在飞艇在高度和水平位置的驻留稳定性问题,可以通过飞艇的动力和控制系统进行位置调整,保持监测范围的稳定性。
3.2 基于无人机的基础设施和列车运行环境监测
地面中心制定巡检任务交由翼型无人机巡检,翼型无人机巡检方案如图3所示。巡检时由翼型无人机控制指挥设备进行控制指挥,并实时将无人机状态信息转发至地面中心。翼型无人机所搭载的遥感遥测设备的部分监控数据通过艇载基站实时转发至地面中心。
其主要监测对象包括:①落石、动物、车辆、设施、遗留物品等引起的侵限事件;②地形地貌;③水文;④线路扣件丢失;⑤桥梁垮塌等较大形变;⑥隧道塌陷;⑦接触网异物。
为了保障监测对象覆盖能力和无人机的持续工作能力,该无人机的工作环境及指标参数设置如下:无人机在铁路沿线进行常规或应急巡航飞行,进行巡航监测特定区域与突发事件现场监测;温度-25 ℃~70 ℃环境下可靠工作。在实际使用过程中可能会存在无人机滞留在线路上,与列车、接触网发生接触或干涉,在隧道内或山区巡航时因通信中断而导致失联,风力较大时无人机不能稳定飞行等问题,需要无人机操作人员对监测时间、环境及操作方法有很好的判断能力。

图3 翼型无人机巡检方案
3.3 基于轨旁设施的基础设施和运行环境监测
基于轨旁设施的基础设施和运行环境监测系统由地面传感器进行状态感知,并将数据通过现场采集服务器进行收集,最后通过无线网络发送至后台数据处理服务器。
其主要监测对象包括:①气象环境;②线路路基沉降;③线路钢轨状态;④桥梁应力;⑤落石、动物、车辆、设施、遗留物品等引起的侵限事件。
为了保障轨旁监测设备的可靠性和稳定性,其工作环境及指标参数设置如下:温度-25 ℃~70 ℃环境下可靠工作。在实际使用过程中可能会存在线路周边安装设备不牢固,造成对线路限界侵限等风险,需要加强设备安装牢固性。
3.4 机车运行状态监测
在车载监测节点内部,车载数据采集、存储与处理设备接收所有车载传感监测系统输出接口以及既有监测系统数据总线的数据并进行存储、预处理、统一编码与集成,然后经空间路由网关、车载移动通信终端发送出去,通过空天车地轨道交通专用网络发送至地面中心节点。列车监测节点向地面中心节点发送本列车的状态监测数据,在地面中心的显示终端上显示列车状态信息。机车状态监测数据采集、分析、转发和显示流程如图4所示。
其主要监测对象包括:①轴箱状态;②齿轮箱状态;③牵引电机状态;④制动系统状态;⑤辅助逆变系统状态;⑥司机状态。
为了保障车载监测设备的可靠性和稳定性,其工作环境及指标参数设置如下:温度-25 ℃~70 ℃环境下可靠工作;满足《轨道交通 机车车辆电子装置》(GB/T 25119—2010)要求。在实际使用过程中可能会存在车外安装的设备松脱等风险,需要车外设备满足振动冲击要求并采取相应防松、防脱措施。

图4 机车状态监测数据采集、分析、转发和显示流程
3.5 基于地面传感器和卫星的列车位置实时监测
基于卫星定位的多传感器信息融合组合定位如图5所示,在列首放置一套列车定位单元,采用GNSS/INS(全球导航卫星系统/惯性导航系统)松耦合组合定位算法,结合差分定位技术,随着场景的变化,系统自动切换定位方法,实现列车高精度无缝定位。

图5 基于卫星定位的多传感器信息融合组合定位
针对重载铁路高密度、大轴重及长大编组列车的运行特点,结合列车高精度连续无缝定位技术,实现列车面向线、桥、隧等多种复杂运行场景实现高精度连续无缝定位。
3.6 轨道交通系统状态信息获取、融合与决策支持平台
通过空天车地信息深度融合方法和复杂环境下列车与基础设施运营安全状态的综合分析技术、多平台监测信息的时空关联关系与融合模型、多维度监测信息大数据接入和存储管理技术、基于数据云和计算云的监测信息大数据挖掘技术,实现对多元时空大样本数据的有效处理和分析利用,构建信息共享交互大数据处理平台。
其实现的功能包括:①重载铁路应急信息获取;②重载铁路突发事件分类分级;③重载铁路应急预案编制管理;④重载铁路应急预案模板管理;⑤重载铁路应急资源管理;⑥重载铁路应急预案命令下达;⑦应急条件下重载铁路应急运输径路遴选;⑧应急条件下重载铁路列车开行方案编制;⑨应急条件下重载铁路列车编组计划编制;⑩重载铁路应急预案评估;应急条件下重载列车开行方案与编组计划评价;重载铁路列车运行径路评价。
3.7 运营与安全综合保障的空天车地信息协同技术平台
空天车地轨道交通专用网由浮空器节点、无人机节点、列车节点、地面移动节点和地面中心节点、地面站节点组成,空天车地轨道交通专用网拓扑结构图如图6所示。

图6 空天车地轨道交通专用网拓扑结构图
为了保障监测信息的稳定可靠传输,空天车地专用网络系统的指标参数设置如下:高速接入带宽≥2 Mbps;临空地骨干链路通信带宽≥100 Mbps;转发速率≥300 Mbps;地面监测节点带宽≥100 Mbps;车-空-车、车-空-地信息无缝互联,业务信息传输速率≥1 Mbps。
4 结语
本文详细分析了基于空天车地一体化技术在列车群车联网系统构建及关键节点研究中的现状及问题,提出了系统总体框架并分别介绍了艇载节点、机载节点、车载节点和地面节点的关键性能和通信模式,最后详细分析了系统研究的关键问题,以期为该领域技术研究和深化应用提供参考。
猜你喜欢
机械工业标准化与质量(2022年3期)2022-08-12
软件(2021年3期)2021-08-17
小哥白尼(趣味科学)(2021年4期)2021-07-28
云南画报(2021年4期)2021-07-22
装备制造技术(2020年3期)2020-12-25
东北大学学报(自然科学版)(2020年12期)2020-12-18
小学生学习指导(低年级)(2019年6期)2019-07-22
山东工业技术(2018年21期)2018-12-07
西南石油大学学报(自然科学版)(2016年6期)2017-01-15
智能建筑电气技术(2015年5期)2015-12-10