光电转塔自动搜索跟踪监视低小慢目标控制方法
2021-04-07 12:22:06张龙浩陈国强程庆敏
激光与红外 2021年3期
张龙浩,陈国强,徐 梁,沈 腾,程庆敏
(中国航空工业集团公司洛阳电光设备研究所,河南 洛阳,471000)
1 引 言
低小慢目标是指具有低空、超低空飞行,尺寸小,飞行速度较慢等特征的小型飞行器等目标,低小慢目标目前已对我国机场、油田等事关民生国防的重要场所构成重大安全威胁[1]。对低小慢目标有效、快速、准确的发现、跟踪、识别,从而实现全天时、全天候、全方位、自动化的低小慢监视能力具有重大的意义。也是进一步实现对低小慢目标进行干扰压制和杀伤摧毁的基础。
目前对低小慢目标的探测方式主要有雷达探测和光电探测。目前国内环扫LFMCW雷达系统可以在复杂杂波背景对低小慢目标探测,并对探测范围内的低小慢无人机进行自动跟踪[2],但是雷达难以探测目标的轮廓特征和辨别目标的形态和种类。光电探测也是探测低小慢目标的重要方式。但目前对低慢小目标的光电探测系统大多依赖人工手动搜索,效率低,消耗人精力,且人工很容易看漏目标。自动化程度较低,无法实现人不管。提出了一种对低小慢目标实现全自动搜索跟踪监视的光电转塔控制方法,可以在雷达的配合下,实现全自动工作,无需手动操作光电转塔。
2 系统组成
低小慢目标跟踪监视光电转塔是低小慢目标自动跟踪监视系统的一部分(如图1所示),低小慢目标自动跟踪监视系统,由雷达系统、光电转塔、和光电转塔显示控制系统组成(如图2所示),他们共同工作,实现对对低小慢目标的自动发现、跟踪、监视、识别。

图1 低小慢目标跟踪监视光电转塔

图2 低小慢目标自动跟踪监视系统组成图
雷达系统主要由环扫线性调频连续波(LFMCW)雷达组成,LFMCW雷达是探测近程低小慢目标的常用传感器,具有高距离分辨率、高接收灵敏度、低发射功率,全天候工作等优点[3]。雷达系统可以自动探测低小慢目标给出目标位置信息,并发送给光电转塔,引导光电转塔对目标进行自动搜索、跟踪监视和识别。
光电转塔显示控制系统可以向光电转塔发送控制信息,显示可见光红外图像、光电转塔运行信息和探测到的低小慢目标信息,如操作人员如对其他目标感兴趣也可通过显示控制系统让光电转塔退出全自动模式,手动控制转塔。
低小慢目标跟踪监视光电转塔是具备昼夜间目标搜索成像功能的两轴四框架光电转塔。转塔内有长焦高清可见光传感器和长焦制冷式红外传感器两个传感器。
转塔内有惯性姿态测量单元,可以输出转塔光轴的空间姿态信息。根据光轴姿态信息、转塔自身和目标地理位置等信息可以算出使转塔对准已知地理位置目标所需转动到的方位俯仰角。
光电转塔内有图像处理器,它可以对光电转塔传感器采集的红外图像进行处理并对低小慢目标进行自动检出和跟踪。图像处理器采集实时红外图像后,首先会使用目标对比度增强算法对图像进行预处理并对目标背景进行抑制,然后会对图像进行分割及虚警抑制对序列图像进行多帧关联来提取目标[3],并将信噪比最高的目标进行检出和锁定,该算法能运行在嵌入式设备上,快速准确的目标检测。该方法易于实现,能提高检测概率,较好并且实时完整地检测出视频图像中的低小慢目标,并且降低虚警率,图像处理器检测低小慢目标流程图如图3所示。

图3 图像处理器检测低小慢目标流程图
3 实施方法
在低小慢目标跟踪监视光电转塔内,传感器自动控制系统和运动自动控制系统两个系统配合工作,共同实现实现光电转塔的全自动化工。
3.1 准备工作
首先在地面上已知地理位置信息点(经度Lo、纬度Bo、高度ho)的位置安装光电转塔,并且雷达系统和光电转塔相交联,使雷达可以实时向光电转塔传输探测到的低小慢目标所在的的预测地理位置(经度La、纬度Ba、高度ha)。地面开机的检查工作,光电转塔上电完成初始化并自检,向显示控制系统发送系统参数信息,并接收显示控制系统控制。同时光电转塔等待雷达发送目标信息,当收到雷达信息后,光电转塔自动进入自动化工作模式。
3.2 传感器自动控制系统
传感器自动控制系统会自动控制可见光传感器和红外传感器视场将低小慢目标以合适的大小显示在图像中,并且自动调焦使目标清晰。
根据低小慢目标所在的预测地理位置(La、Ba、ha)和光电转塔所在的地理位置(Lo、Bo、ho),将两点对经纬高转化为两点在地球坐标系中的坐标,便可求出目标预测点和光电转塔间的距离(Lao)[4]。
观察点A的经度LA,纬度BA,海拔高度hA。在地球坐标系中的坐标为:
其中:
其中,a为地球椭球长半轴;e为地球椭球第一偏心率。
因为低小慢目标在红外图像中特征更明显,所以红外传感器提供红外图像给图像处理器用于低小慢目标检出和跟踪,可见光传感器用于辅助观察。
转塔内的传感器自动控制系统可以根据目标预测点和光电转塔间的距离(Lao)控制转塔内的红外可见光传感器自动调焦变倍,使低小慢目标可以在图像一直保持清晰和在图像内有合适的大小。
根据目标预测距离Lao和低小慢目标的平均大小可以调节红外和可见光图像视场角大小,使目标在红外图像内有适合检出和观察的大小可见图像内也适合观察。设低小慢目标的平均尺寸为LD,那么目标在视频画面中所占像素数可用以下公式计算得出:
其中,P为目标在视频中横向和纵向所占的像素宽度;F为传感器视场角;R为视频分辨率。
根据目标预测距离Lao对可见光传感器和红外传感器进行自动调焦,使目标在图像内清晰。图4是传感器自动控制系统的工作流程图。

图4 传感器自动控制系统的工作流程图
3.3 运动自动控制系统
转塔内的运动控制系统和图像处理器配合工作,实现对低小慢目标的自动对准和跟踪。
根据光电转塔地理位置(La、Ba、ha)和目标预测点地理位置(Lo、Bo、ho)通过坐标转换可以算出这两个点在地球坐标系内的坐标(OXYZq),进而计算出这两点在惯导坐标系内的坐标(OXYZh),然后可计算出在惯导坐标系(OXYZh)下光电转塔指向目标预测点的方向矢量[5]。光电转塔内的惯性姿态测量单元输出了红外传感器和可见光传感器的光轴姿态、根据光轴的姿态、目标预测坐标的方向矢量和转塔的方位俯仰角,可以计算出需要使转塔的瞄准线对准目标预测点所需要的转塔方位角η1和俯仰角η2。

图5 转塔瞄准线对准目标预测点原理图
当系统全自动流程开始时,光电转塔运动控制系统进入角度对准模式,转塔的方位俯仰角对准η1、η2,从而驱动瞄准线指向目标预测位置,当转塔实时方位俯仰角θ1,θ2和对准预测目标方位俯仰角η1,η2的绝对差小于阈值,且转塔红外和可见传感器根据目标预测距离Lao调焦变倍到位时,转塔控制图像处理器开始在转塔红外图像内检出信噪比最高的红外小目标。如果检出目标成功,转塔图像处理器锁定目标并向转塔运动系统报告目标和红外图像中心的偏差量,光电转塔运动控制系统进入图像跟踪模式,控制转塔转动将目标拉到图像中心对目标进行持续跟踪[6]。
由于雷达系统从发现目标到计算出目标坐标并报告光电转塔目标有一定时间(3 s左右)的延时,所以对准目标预测点后,目标未必在转塔传感器视场范围内,所以需要对视场的邻近区域也进行搜索。如果对准后图像处理器未检出目标,运动控制系统控制转塔在对准的方位俯仰角η1,η2的邻近区域内进行小范围扫描,并继续检出低小慢目标,设ξ1、ξ2为转塔实时对准的方位俯仰角的给定值,则有:
ξ1=η1+Aφ1sin(ωt)
ξ2=η2+Aφ2sin(ωt)
其中,A为扫描幅值系数;ω为扫描频率;φ1、φ2分别为转塔当前的红外视场方位角和俯仰角。
当检出目标后并稳定跟踪一段时间后,可以根据图像视场、目标预测距离Lao和图像中的目标像素大小估算目标的大小,设LM为目标大小,则有:
其中,P为目标在视频中横向和纵向所占的像素宽度;F为传感器视场角;R为视频分辨率。
常见的低小慢目标包括旋翼无人机(轴距0.4~1.8 m)和固定翼无人机(翼展1~4 m),可以根据估算的目标大小对低小慢目标类型做初步的判断。
在个别天气条件下,如天空中有很多碎云的时候,可能会出现检出目标错误的情况,此时转塔在检出目标并进入图像跟踪模式后也会跟踪错误的目标。但是这时由于跟踪的目标错误,转塔实时方位俯仰角θ1,θ2和对准预测目标方位俯仰角η1,η2的差值会逐渐增大,当差值大于阈值时,此时运动控制系统控制转塔重新进入角度对准模式对准η1,η2,对准后系统会自动重新尝试进行检出和跟踪,直到对准正确目标。
当雷达检测到新目标时,由于目标预测点地理位置(Lo、Bo、ho)大幅变化,对准预测目标方位俯仰角η1,η2也会大幅变化,此时转塔角度方位俯仰角θ1,θ2和目标方位俯仰角η1,η2的差也会大于阈值,系统会自动重新对准进入新一轮的自动化进程。图6是光电转塔自动运动控制系统的工作流程图。
4 试验验证与结果分析
为验证低小慢目标跟踪监视光电转塔对低小慢目标的全自动跟踪监视识别的效果和性能,使用多种低小慢目标在不同距离多种天气条件下进行了试验。试验中转塔能够成功的对低小慢目标进行检出监视,识别目标的轮廓特征和辨别目标的形态和种类如图7、8所示。
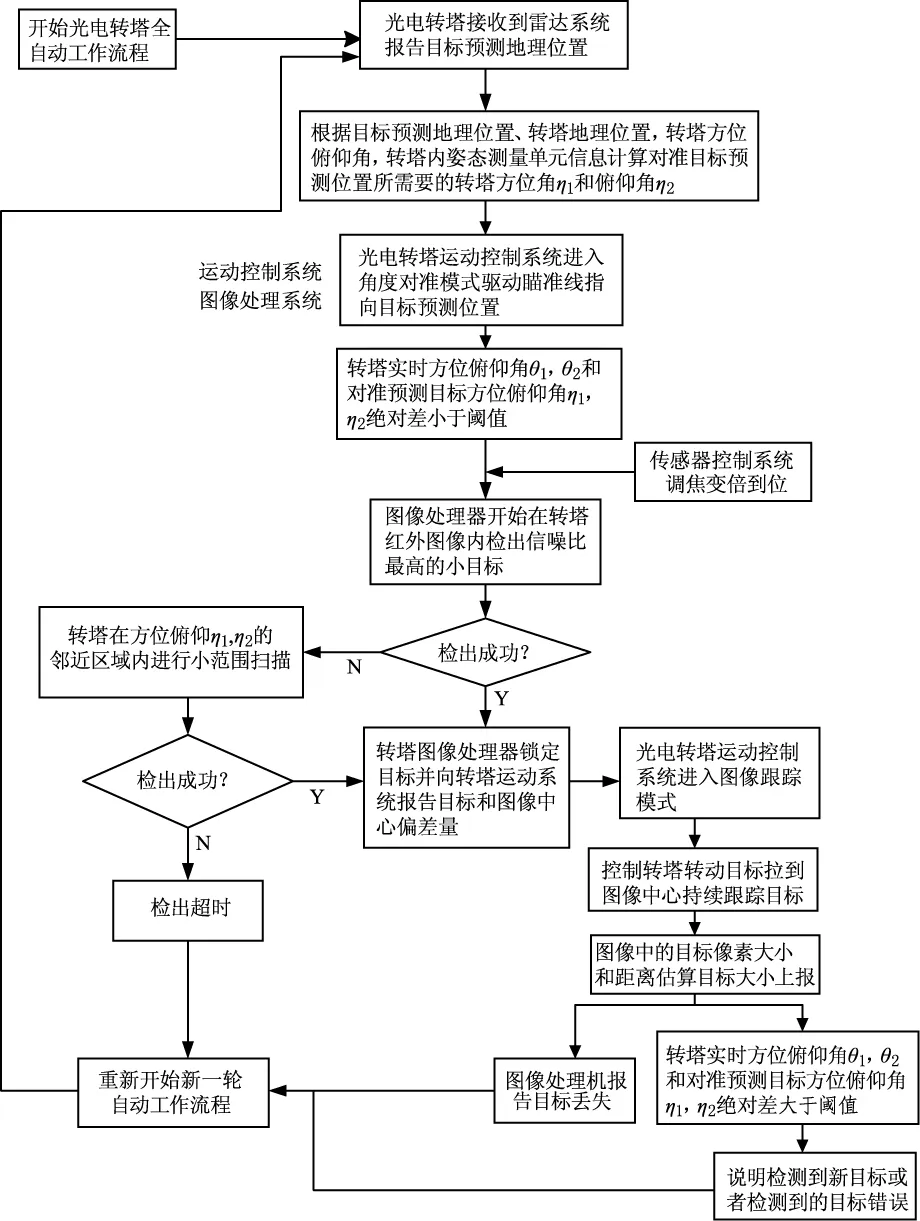
图6 光电转塔自动运动控制系统的工作流程图

图7 光电转塔红外图像检出低小慢目标

图8 光电转塔可见光传感器发现低小慢目标
表1给出了光电转塔对多种小目标自动跟踪监视试验结果,试验中光电转塔对多种低小慢目标均能成功进行检出和识别,对于大的低小慢目标的检出识别距离更远,另外天气也会对低小慢目标的识别距离有一定的影响。

表1 光电转塔对多种小目标自动跟踪监视试验结果
5 结 论
本文提出了一种低小慢目标实现全自动搜索跟踪监视的光电转塔控制方法,可以实现全自动工作,无需手动操作光电转塔。在雷达发现低小慢目标后,光电转塔会自动搜索对准检出目标,将目标以合适的大小清晰的显示在图像中并一直跟踪,并对目标的大小估算初步识别。如果目标错误丢失可以自动退出目标跟踪,并自动重新尝试对目标进行搜索跟踪。雷达报告新的目标转塔会自动切换跟踪新的目标。
试验证明,该方法可以全自动实现对各种常见的低小慢目标的发现、自动跟踪监视和识别,由于整个工作流程全自动化,此种控制方法工作大大节省了人力,提高了效率,减少了目标漏检出,并可以对目标的大小估算初步识别。
猜你喜欢
幼儿园(2021年12期)2021-11-06 05:10:20
造船技术(2020年2期)2020-05-18 06:53:28
当代陕西(2018年12期)2018-08-04 05:49:20
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
工业设计(2016年7期)2016-05-04 04:01:49
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
火控雷达技术(2016年2期)2016-02-06 02:29:00
探测与控制学报(2015年4期)2015-12-15 15:01:00
制造技术与机床(2014年11期)2014-04-23 12:44:16