基于导电织物的应变式柔性传感器
2021-04-06 09:09沈宏骏徐先亮
林业机械与木工设备 2021年3期
沈宏骏,吴 杰,陈 昕,徐先亮
(南京林业大学机械电子工程学院,江苏 南京 210037)
近年来,智能机器人技术蓬勃发展,其引申出的触觉传感器研究也随之发展。触觉传感器力求模拟人类皮肤性能,将物理信号或无接触的信号(光信号、热信号等)转化为电信号,使机器人实现对外部的感知[1-2]。现如今,触觉传感器已经有了一定的成果[3]。按照测量方法,触觉传感器主要分为电容式、压阻式以及电感式三种。
电容式触觉传感器一般由中间介质层以及上下两个电极层组成,上下电极层分别连接一根导线,用以测量电容变化。当电容式传感器受到外力作用时,中间的介质层会发生形变,使得两电极层之间的间距以及正对面积发生变化,进而改变传感器的电容值[4-5]。压阻式触觉传感器是敏感材料受到外力作用时产生压阻效应,使电阻发生变化,压阻效应是指材料受到应力作用时电阻率发生变化的现象[6]。电感式触觉传感器的工作原理是将非电量(压力、位移等)通过电磁感应转化为电流或电压的变化量[7-10]。
台湾国立成功大学制作出一种三维触觉传感器,该传感器基于硅压阻效应,以四个硅悬臂梁的形变测定出电阻与三维力的变化关系[11];法国巴黎综合理工学院制备出一种三维电容式传感器,该传感器采用上下叉指电极结构,构造出四个电容器,通过测定上下极板的有效面积以及间距变化,得到电容与三维力的变化关系,具有较高的灵敏度[12];台湾大学以巴克纸为敏感元件制作了触觉传感阵列,该阵列具有成本低、易制造等优点[13];合肥工业大学黄英教授团队制备出一种复合介质层电容传感器,该传感器以空气和PDMS作为介质层,当受到大小不同的力时,空气和PDMS占比的变化改变电容大小,下层电极层由5块电极板组成,用于判断各个方向力的大小[14]。
本文研究柔性织物电容式传感器,该传感器以硅胶材料作为介质层,以两层导电布作为电极层,控制传感器的拉伸长度与弯曲角度,从而改变传感器两电极层的正对面积及间距。该传感器具有低迟滞、低成本以及高灵敏度等特点。
1 柔性传感器的原理及设计
设计的基于导电织物的柔性电容式传感器示意图如图1所示。
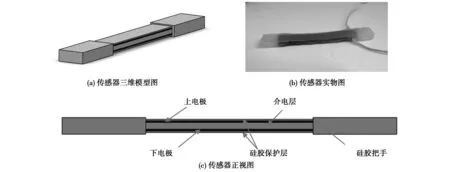
图1 柔性电容式传感器示意图
该电容式传感器采用三明治结构,上下电极层均采用导电织物,介电层为硅胶(Ecoflex 00-30),该材料弹性大,易拉伸,柔韧性好。使用导电织物作为电极层具有导电性能好、强度高、不易拉断、结构简单、成本较低等优点。电容传感器上下两电极层都用同材料的硅胶封装来保护内部电极,并且在传感器的两端各制作了一个固定端(材料为Ecoflex 00-30)。固定端的作用主要是为了拉伸时避免金属夹具与传感器电极层直接接触,进而影响传感器的电容大小。
若忽略电容上下极板的边缘效应,电容计算公式可写为:
(1)
式中:C为两极板间的电容;ε0为真空介电常数,约为8.85×10-12F/m;εr为相对介电常数;S为两电极板正对面积;d为两电极板的间距。
当电容传感器受拉时,上下电极层之间的间距以及正对面积会发生变化,进而导致传感器的电容发生改变。因此,通过测量传感器的电容变化量就可以测得所受拉力的大小。
设电容的初始值为C0,上下电极层的间距为d0,初始正对面积S0。施加拉力后,传感器电容变化量为ΔC,上下极板间距变化量为Δd,正对面积变化量为ΔS。可列出如下关于电容变化方程式:
(2)
2 柔性传感器的制备
在进行柔性传感器的制备时,首先将Ecoflex 00-30中A、B两试剂以1∶1的剂量混合,放在真空搅拌机中搅拌10 min,使其混合充分。将制备好的硅胶混合剂倒入尺寸为100 mm×100 mm×2 mm的模具中,待其固化后取样。在取出样品的一侧涂抹同材料的硅胶作黏合剂,并迅速覆盖一层导电织物。在另一侧进行同样的操作,然后静置3 h,待导电织物与样品完全贴合后,裁剪出尺寸为7 cm×1 cm的样品作为试验所用传感器。
前期试验阶段选择介电层材料时,对硅胶和PDMS都做过测试,发现Ecolfex 00-30硅胶弹性变形能力远高于PDMS,该硅胶材料可拉伸至自身长度2~3倍而不产生塑性变形;而在试验前PDMS在拉伸至自身长度1.5倍时就常常发生断裂。因此取用Ecolfex 00-30作为介质层,以提高传感器的柔韧性。
为了防止拉伸时金属夹具直接接触传感器产生较大的寄生电容进而影响试验的正常进行,设计模具时在传感器的两侧增设了把手部分。传感器制备流程如图2所示。
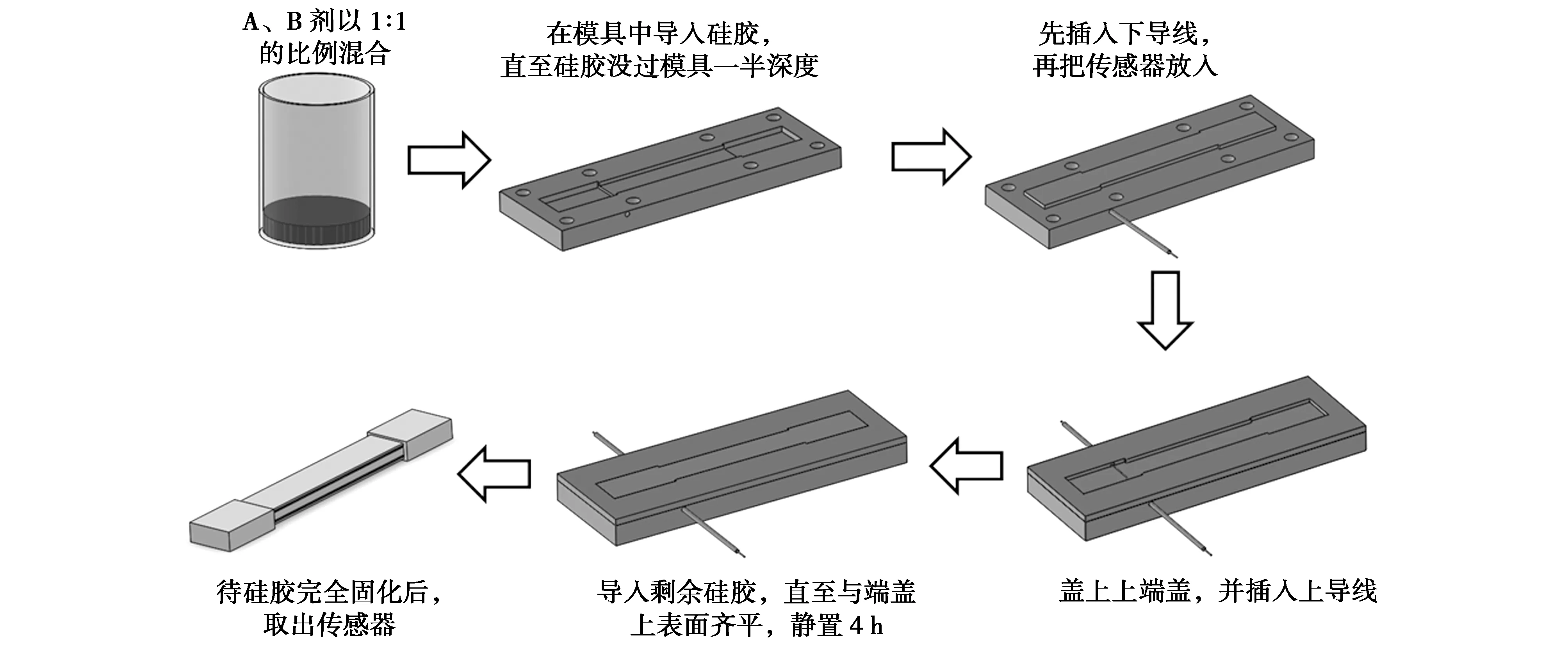
图2 传感器制备流程
制备时,先将Ecolfex 00-30中的A、B两剂以1∶1的剂量混合,放在真空搅拌机中充分搅拌10 min,使其混合充分并抽离其中的气泡。将少量的混合剂均匀地倒入磨具中,使混合剂高出整个模具底部1 mm,静置1 h,待硅胶稍微固化后,再顺着底板上的孔插入下导线,并放入之前剪裁好的织物传感器。要注意混合剂不宜倒入太多或太少,以免传感器导电织物触碰到模具底部而起不到封装保护效果。接着将传感器放入模具,盖上上盖,并顺着上盖中的孔插入上导线。前后两根导线在放置时必须保证要与传感器上下电极层接触,否则会影响后续试验的正常进行。最后,倒入剩下的硅胶混合剂直至与上盖齐平,静置4 h待其完全固化后取出,柔性织物传感器制备完成。
3 柔性传感器性能测试
3.1 拉伸试验
利用LCR-821高精度LCR测试仪对柔性触觉传感器进行拉伸特性试验,如图3所示。
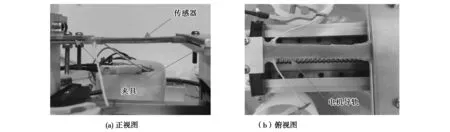
图3 导电织物传感器拉伸测试
试验开始前,为了防止导电织物传感器过于松弛影响后续试验数据,对传感器进行了预拉伸,使导电织物传感器处于自然伸直长度。首先,将导电织物传感器硅胶包裹层夹紧在试验台上;然后,将导电织物传感器的两极与LCR测试仪连接;接着,将导电织物传感器分别拉伸5 mm、10 mm、15 mm、20 mm、25 mm、30 mm、35 mm、40 mm、45 mm、50 mm。测试该传感器在不同拉伸长度下的电容,记录试验数据,建立拉伸长度—电容曲线图,如图4所示。
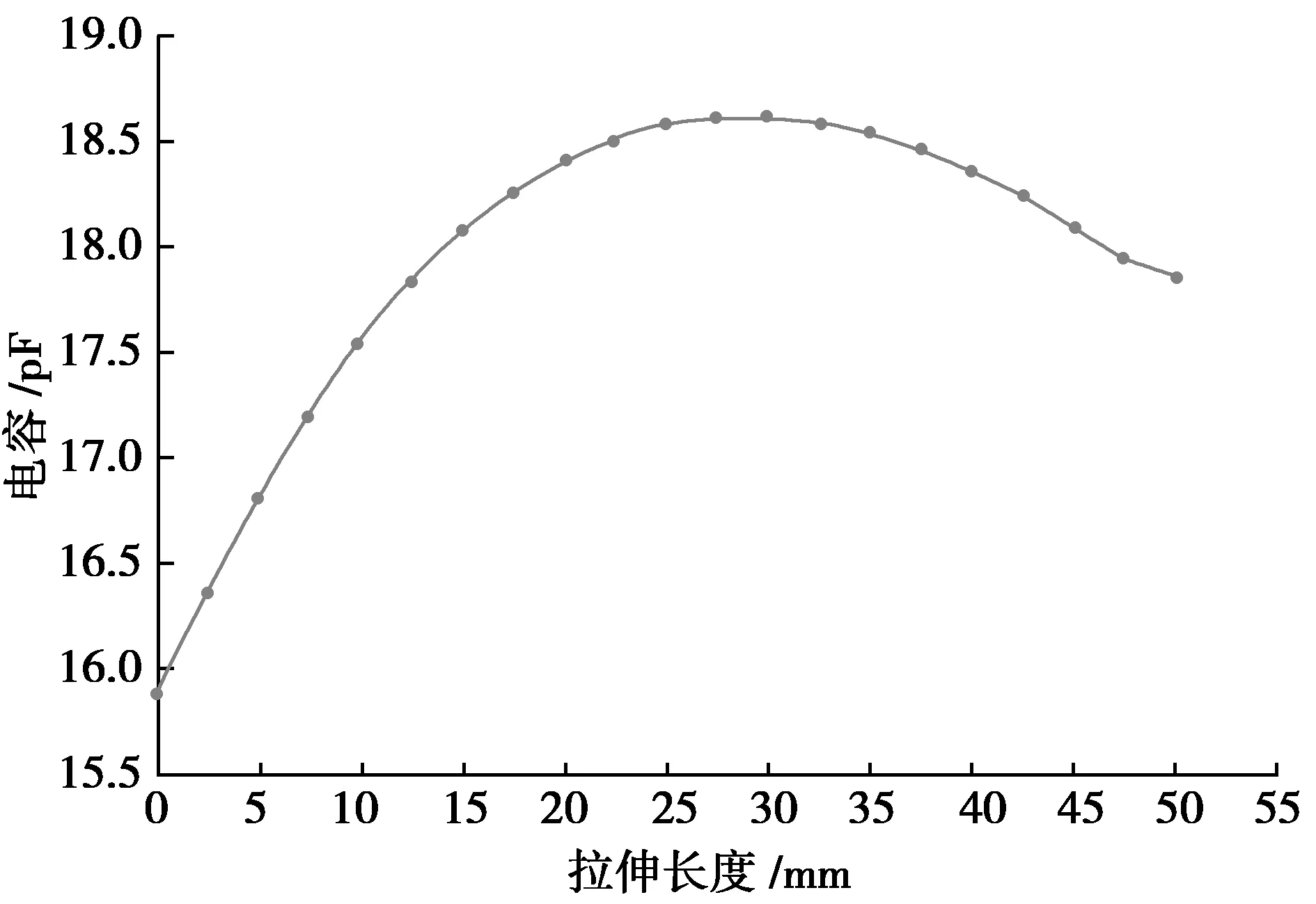
图4 导电织物传感器拉伸长度—电容变化关系曲线
由图4可知,电容随拉伸长度的增加而变大,电容增加速率逐渐下降直至拉伸至30 mm电容达到最大值,这表明该传感器在30 mm时正对面积与电容两电极板间距之比达到最大值。当拉伸长度超过30 mm时,电容随拉伸长度的增长不断减小,且下降速率不断增加。发生这种情况可能是由于导电织物开始发生卷曲,使有效正对面积变小,从而导致传感器的电容值下降。
3.2 重复性试验
利用LCR-821高精度测试仪对柔性触觉传感器的重复性进行试验。拉伸试验重复进行3次,试验结果如图5所示。在反复拉伸试验中,电容最大值相近,稳定性好,说明该导电织物传感器具有较好的重复性。
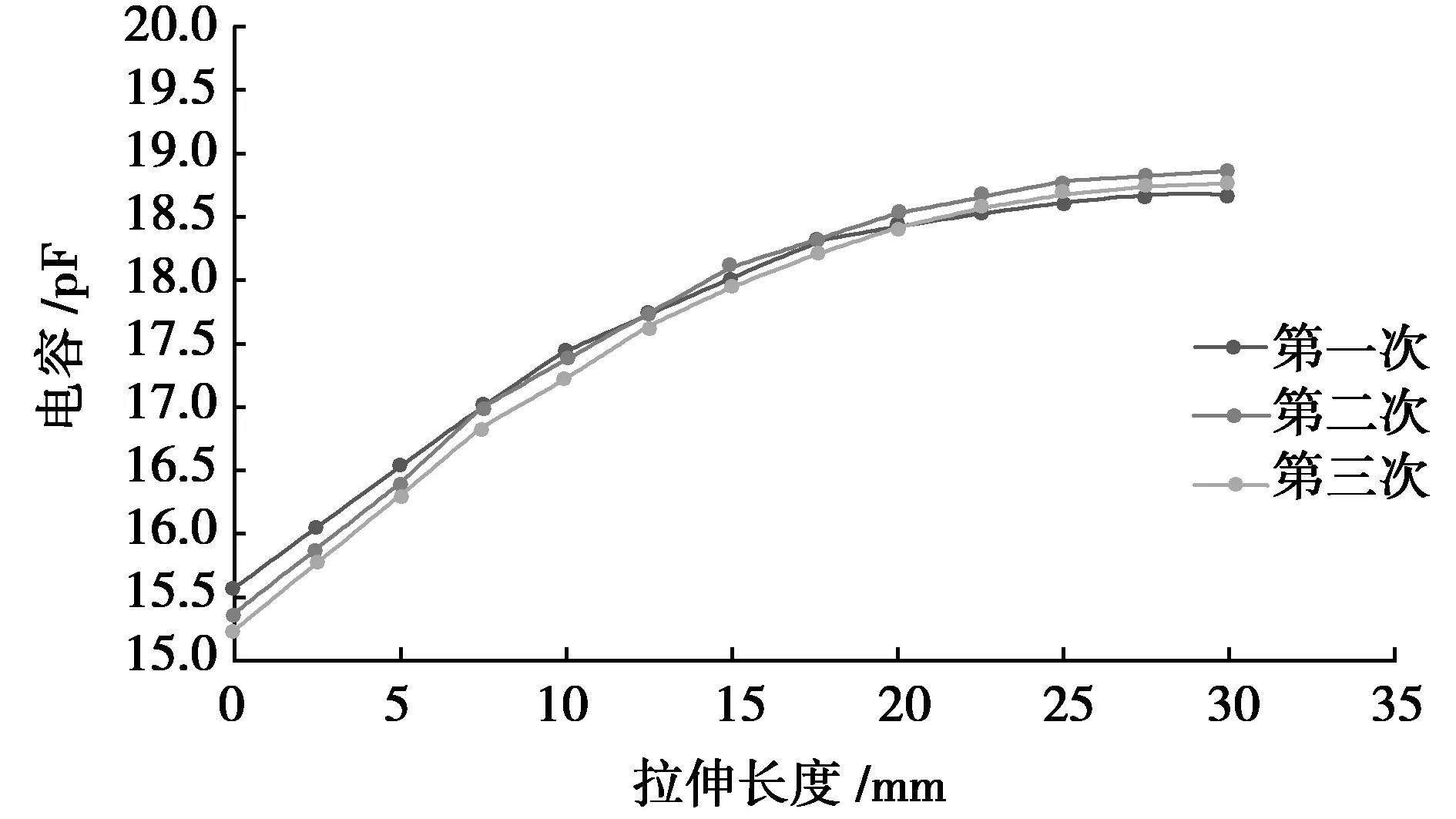
图5 导电织物传感器重复性试验
3.3 迟滞试验
导电织物传感器的迟滞性是指导电织物传感器在施加拉力和卸载拉力过程中,正行程曲线与反行程曲线不重合的程度。在动态试验中,为了防止不可逆影响,应尽量减少传感器的迟滞性。硅胶长链分子的变形滞后受力,从而产生应力弛豫现象[15],硅胶在拉伸与释放的过程中电容会出现差异,从而产生迟滞性[16]。导电织物传感器的迟滞曲线如图6所示,迟滞最大误差为0.39,迟滞曲线图正行程和反行程重合性好,迟滞性较小。
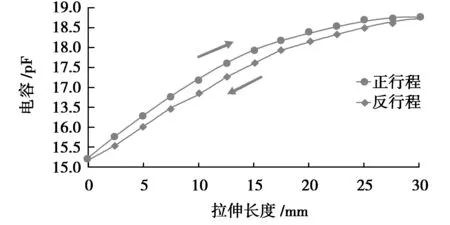
图6 导电织物传感器迟滞特性曲线
3.4 弯曲试验
本试验研究导电织物传感器电容与弯曲角度的关系,弯曲测试特性试验如图7所示。首先将导电织物传感器的两极与LCR测试仪连接,然后将导电织物传感器连接到手指上,如图7(a)所示,通过弯曲手指来测量传感器的电容变化,弯曲角度从0°到100°,每10°测量一次。重复试验20次,取平均值,绘制如图7(b)所示的电容变化曲线图。整个函数图像近似为一条直线,说明该导电织物传感器的电容值随弯曲角度呈线性变化,线性方程为Y=0.02818X+16.648。
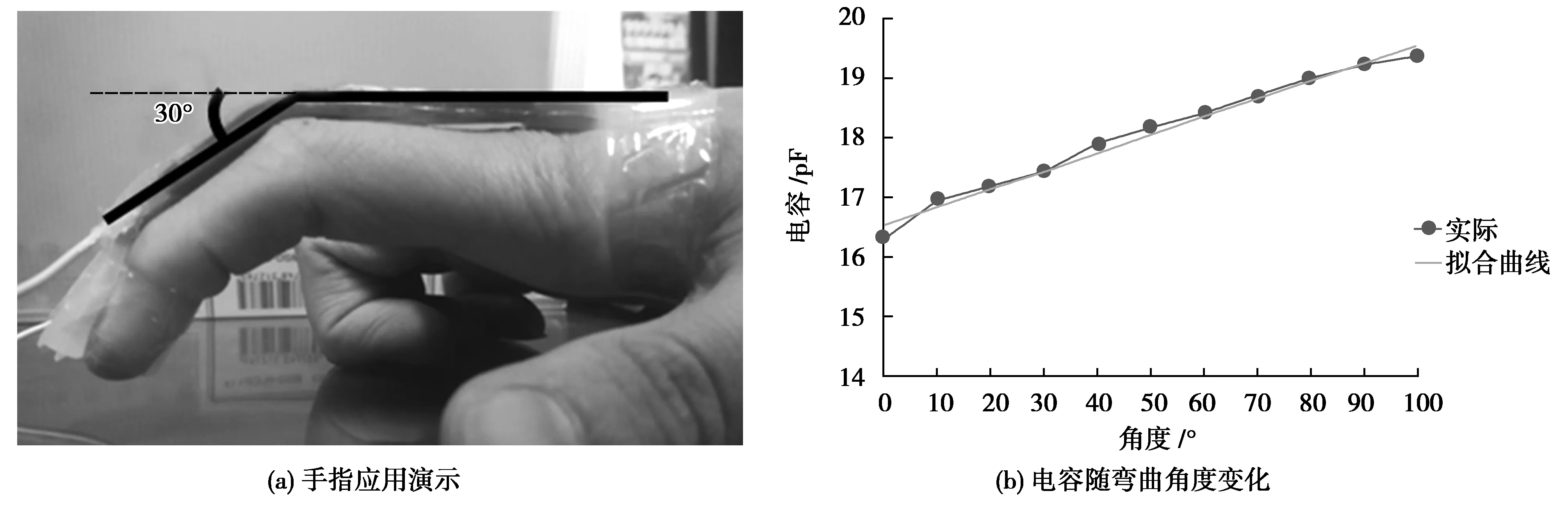
图7 导电织物传感器弯曲测试特性试验
4 小结
提出一种以导电织物作为电极层、硅胶(Ecolfex 00-30)作为介质层的导电织物传感器,该传感器结构简单、制造方便、价格低廉。通过研究其拉伸长度与电容关系以及弯曲特性,发现该传感器在一定范围内,其电容大小随拉伸长度的增加而变大,而当传感器的拉伸长度达到30 mm时,其电容达到最大值。同时,该传感器具有重复性好、迟滞性小、良好的线性关系等特点,其最大迟滞误差为0.39 pF,线性度方程为Y=0.02818X+16.648。
由于导电织物传感器弯曲时有良好的线性度,可以将其应用在机器人关节的弯曲控制上。通过检测电容的大小,实时控制机器人关节弯曲角度,使机器人手指、肘关节具有更大的灵活性。该传感器还能用在机器人的末端执行器上作为触觉感知装置,通过检测电容的大小来获取机器人抓取物体的抓取力,改善机器人与外界的交互性。由于该传感器具有较好的可拉伸性能,可以应用到智能服装领域,该导电织物传感器有较为广阔的应用前景。
猜你喜欢
湖南工业职业技术学院学报(2022年3期)2022-12-06
计算技术与自动化(2022年1期)2022-04-15
东北大学学报(社会科学版)(2022年1期)2022-02-17
海外星云(2021年6期)2021-10-14
皮肤病与性病(2021年3期)2021-07-30
科学导报·科学工程与电力(2019年26期)2019-08-13
电子制作(2019年10期)2019-06-17
红豆(2017年4期)2017-04-13
中国新闻周刊(2017年7期)2017-03-22
三联生活周刊(2017年9期)2017-03-03