基于Prescan的信号灯路口跟停场景虚拟重构
2021-04-05 09:25:06张慧刘兴亮黄昆付会通杨路鹏
汽车文摘 2021年4期
张慧 刘兴亮 黄昆 付会通 杨路鹏
(中国汽车技术研究中心有限公司,天津300300)
主题词:跟停场景 场景虚拟重构 神经网络 智能网联
缩略语
EuroFOT European Field Operational Test
China-FOT China Field Operational Test
BSD Blind Spot Decision
TTC Time To Collision
1 前言
根据奔驰、宝马、特斯拉等知名厂商研发经验,智能驾驶技术主要包括3个步骤:道路测试、场景挖掘、场景虚拟重构。其中,道路测试旨在积累自然驾驶数据的历程,如欧洲大型实车路试(European Field Operational Test,EuroFOT)项目[1]和中国大型实车路试(China Field Operational Test,China-FOT)项目[2]。场景挖掘针对道路测试的驾驶数据进行分类提取和挖掘,如中国汽车技术研究中心开展的跟车场景挖掘、BSD 场景挖掘、危险场景挖掘等项目[3]。场景虚拟重构是场景虚拟化、数据化技术成熟的重要标志,如李银国、周中奎利用双目摄像头提取道路环境信息,进行智能驾驶场景的虚拟重构[4]。目前场景虚拟重构的主流软件有CarSim、Prescan、VTD等,可以通过道路建设、目标物生成、初始条件、运动模型导入等步骤在软件中将所需要的场景生成重构,极大地提升了智能驾驶研发和验证的效率。
本文研究的信号灯路口跟停场景的虚拟重构,以Prescan软件作为虚拟场景的搭建平台,生成场景中的车辆、道路以及交通标志,针对静止的目标前车和制动的目标前车,构造跟停模型,设定本车及目标车的初始条件,通过Prescan和Simulink联合仿真[5],自动生成虚拟的信号灯路口跟停的场景,为智能驾驶测试场景库的信号灯路口跟停场景的虚拟重构模型搭建提供了技术支持。
2 跟停场景虚拟生成控制策略
2.1 跟停场景搭建架构
信号灯路口车辆跟停场景的搭建架构由道路环境建设模块、初始条件设定模块和车辆控制模块3部分组成。其中,道路环境建设模块包括道路、交通标志的建设,用于生成场景的道路环境条件;初始条件的设定旨在明确对本车位置和目标前车的位置、速度、加速度初始条件;车辆控制模块以车辆状态和目标参数为依据,控制车辆运动。
2.2 道路环境建设模块
道路环境建设模块主要目的是实现信号灯路口道路的自动生成。信号灯路口道路的测试用例提供双向4车道、双向6车道、双向8车道的道路模型,可以对测试用例的车道数量、车道宽、车道线颜色和类型进行设置,如表1所示。
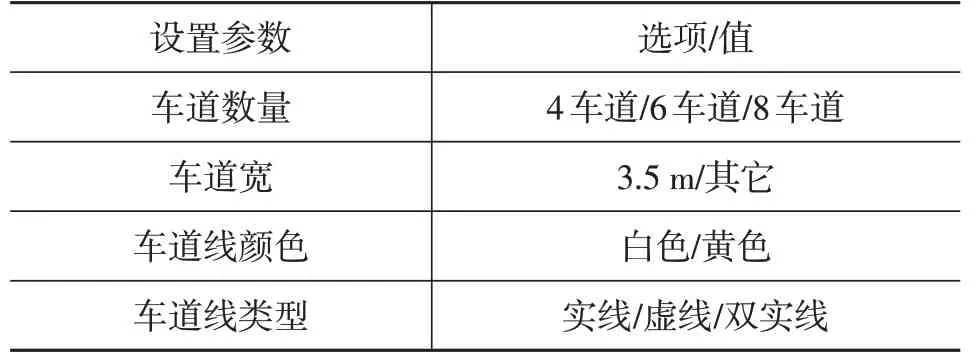
表1 道路设置
交通信号灯作为信号灯路口的主要交通标志物,具有指导机动车、非机动车、行人有序的通过信号灯路口的功能,是跟停场景的重要组成部分。测试用例提供多种搭建的场景环境,其中信号灯可选择种类包括:机动车信号灯(横置式)、机动车交通信号灯(直立式)、非机动车信号灯、人行横道信号灯。
2.3 初始条件设定模块
在信号灯路口跟停场景的虚拟重构过程中,以本车的初始位置作为场景参考系的原点(0,0),自动设定本车与目标前车位于同一车道内,因此场景重构仅需考虑车辆的纵向运动状态[6],初始条件设定模块对跟停场景中本车位置、速度和目标前车的位置、速度、加速度参数进行设定,如图1所示,输出信息为初始时刻的车辆运动状态。
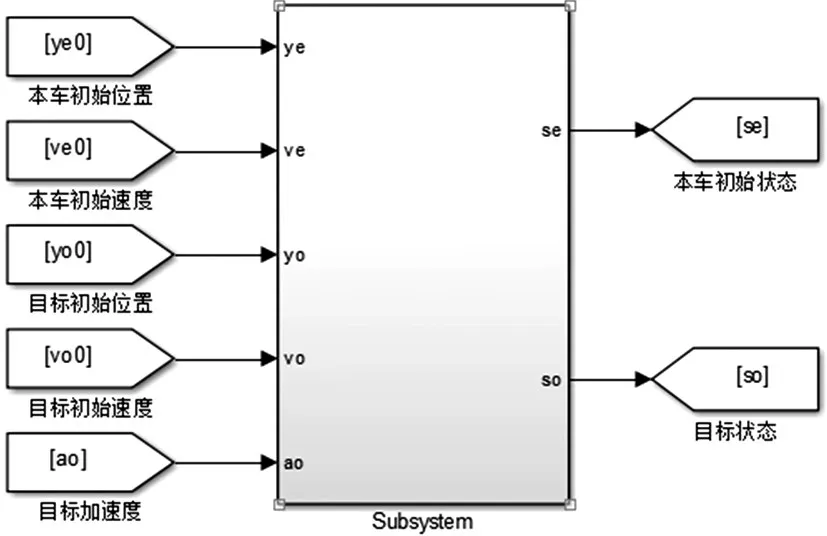
图1 初始条件设置模块
2.4 车辆控制模块
车辆控制模块是虚拟场景自动生成的核心部分,它通过跟停模型控制本车跟停的运动过程,针对目标车的运动状态,将跟停场景分为2组:目标车静止和目标车制动减速[7]。在场景的虚拟重构过程中,由于各个测试车辆的结构各异,动力学模型各不相同,在此本文采用Prescan 默认的动力学模型作为本车的动力学模型。
2.41 最小制动减速度计算
一般而言,但凡新成立的部门在选才用人上都很重视专门学识,前清旧员们大多不具备专门学识,因此成为被裁汰的主要对象。但对此极力反对者有之,其理由是政府正当用人之际,应力为挽留才是。如交通部被裁撤人员觉得去留不公平,遂于4月28日在湖广会馆开会,研究对待梁士诒、叶恭绰之方法。同日,南方交通部人员针对此事在金台旅馆开会,研究如何到部履职问题。时人评论:“两相映照,颇耐人寻味也。”
当前方目标车辆处于静止状态时,为保障车辆的行驶安全,需要计算满足本车最小制动减速度[8],它是避免本车与目标车碰撞的本车加速度临界值,计算过程如下:
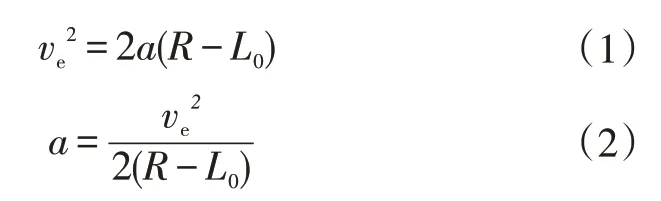
式中,ve为本车初始速度;a为本车的最小制动减速度;R为目标与本车的车头间距;L0为最小安全距离,其值为3 m[9-11]。
当前方目标车辆处于制动减速状态时,需要综合考虑本车与目标车在行驶过程中的安全问题。为保障车辆的行驶安全,需要计算即时碰撞时间(Time To Collision,TTC)、目标车的制动时间、避免本车与前车碰撞最小制动减速度的临界值[12-16],默认目标车与本车的相对速度为vr<0,目标车的加速度aobj<0,计算过程如下:
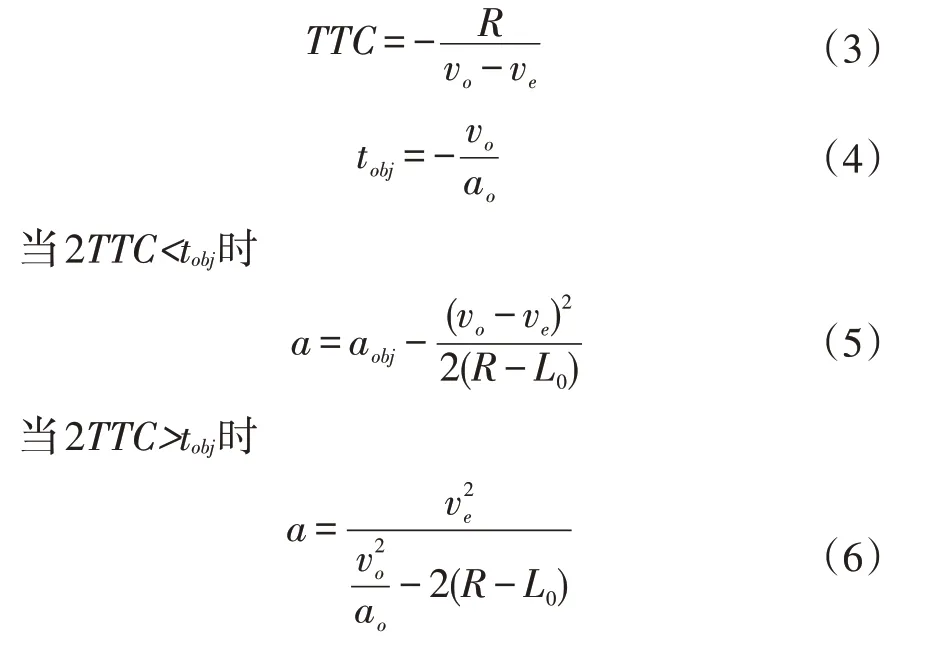
式中,TTC为即时碰撞时间;R为目标与本车的车头间距;vo为目标车初始速度;ve为本车初始速度;a为本车的最小制动减速度;tobj目标车的制动时间;a0为目标车的制动减速度;L0为最小安全距离。
2.42 基于神经网络的跟停控制模型
最小制动减速度是避免本车与目标车碰撞的加速度临界值,实际生活中驾驶员跟停往往会有更长的安全距离或更大的制动减速度。为了使虚拟重构跟停场景能够更加真实的还原实际情况,利用神经网设计本车的跟停模型[17-19],提取大量实际跟停场景的车辆状态信息作为输入、输出对,构造基于神经网络的跟停模型示意图,如图2所示,模型输入为本车速度、最小制动减速度、相对距离、相对速度等,输出为下一时刻的本车加速度。
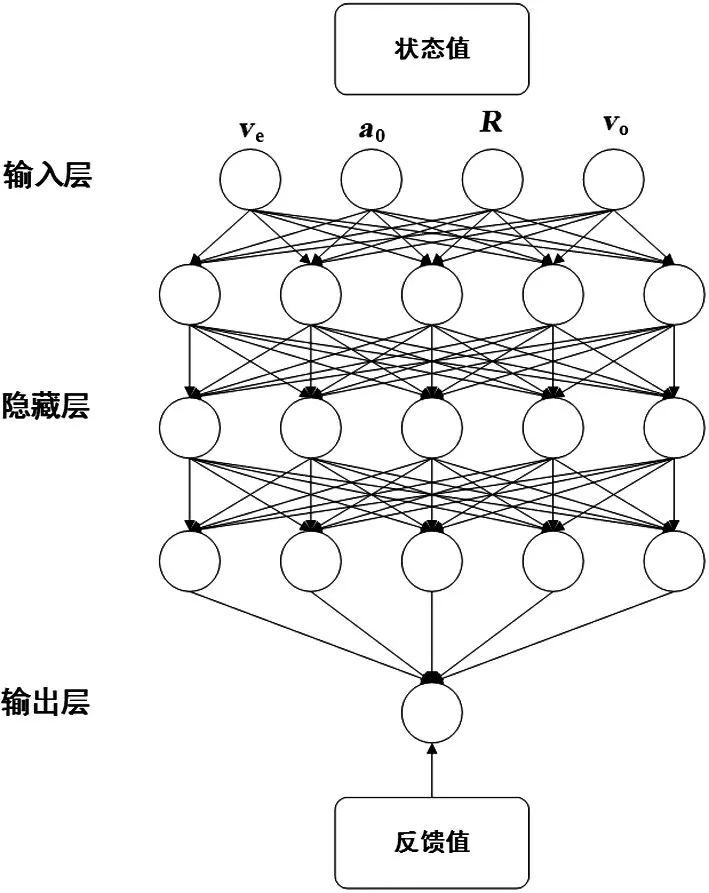
图2 智能驾驶系统示意
(1)隐含层神经元层数和个数选择:
式中,n1为隐含层神经元个数,n2为输入神经元个数,m为隐含层单元数目,a为1~10之间的调节常数。
(2)神经网络的训练方法选择
常用的神经网络训练方法包括:下降法、牛顿算法、共轭梯度法、准牛顿法和Levenberg-Marquardt(LM)算法。依据模型参数以及对数据量进行对比,结果表明L-M算法的收敛速度最快,比其它算法的效果快几倍到几十倍。L-M算法的参数更新公式为:

式中,ΔW为参数更新矩阵,J为Jacobian 的加权系数矩阵,I为单位矩阵,u为加权系数,T为矩阵转置。
(3)数据提取及训练结果
提取目标车停止和目标车制动试验过程中的车辆状态数据对神经网络进行训练。目标车停止的试验过程:目标车停在道路前方,控制本车在设定的位置达到设定的初始速度,由驾驶员进行跟停操作。目标车制动的试验过程:目标车位于道路前方,以恒定的加速度进行制动,由驾驶员控制本车在初始条件下跟随目标车停止。由于驾驶行为的学习需要大量数据,最终在10~40 km/h 的速度区间(目标速度小于本车速度)截取了4 886 组数据。选择本车速度、目标速度、相对距离、相对速度作为输入,选择本车加速度作为输出,训练一个20 层的神经网络,样本数据按70%:15%:15%的比例分为训练样本、测试样本、仿真样本,训练结果如表2所示。
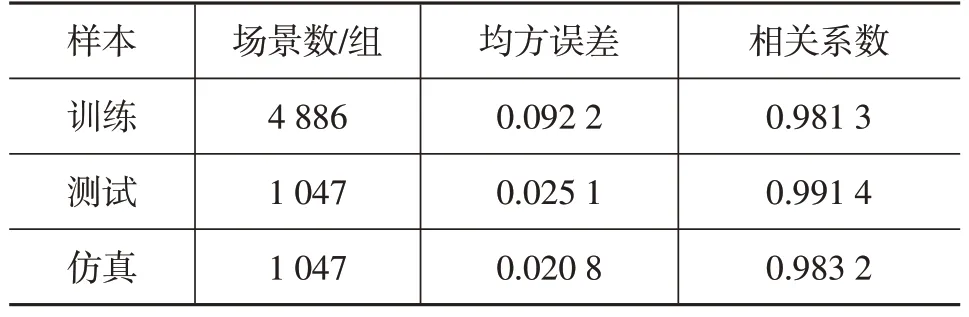
表2 神经网络的训练结果
车辆控制模块利用神经网络输出的本车加速度和基于参数化设计的跟停场景控制模型,计算获得车辆的运动状态和行驶轨迹[19]。定义安全信号asafe,车头间距大于危险车头间距(本车以最小制动减速度行驶)的值为1,否则值为0。
跟停控制模型如图3 所示,以本车状态、目标状态、神经网络计算的本车加速度、相对距离、相对速度和最小制动减速度作为输入,控制输出本车和目标车的行驶轨迹和安全信号。
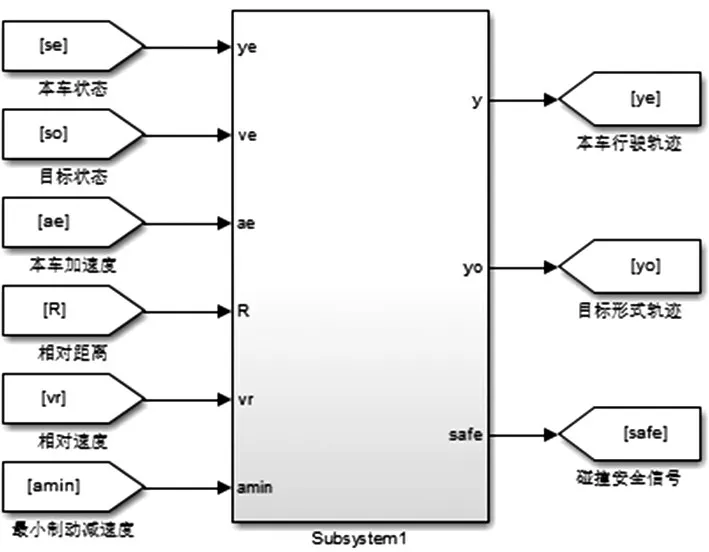
图3 跟停控制模型
3 跟停场景虚拟重构结果验证
重构场景示例1 为目标处于静止状态的跟停场景,重构的道路设置、本车初始条件设定及目标前车初始条件设定结果如表3、表4所示,十字路口信号灯选择机动车信号灯(直立式)。
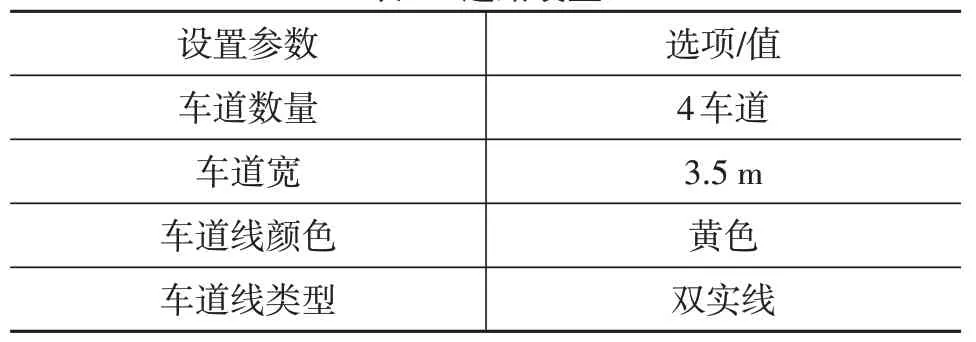
表3 道路设置
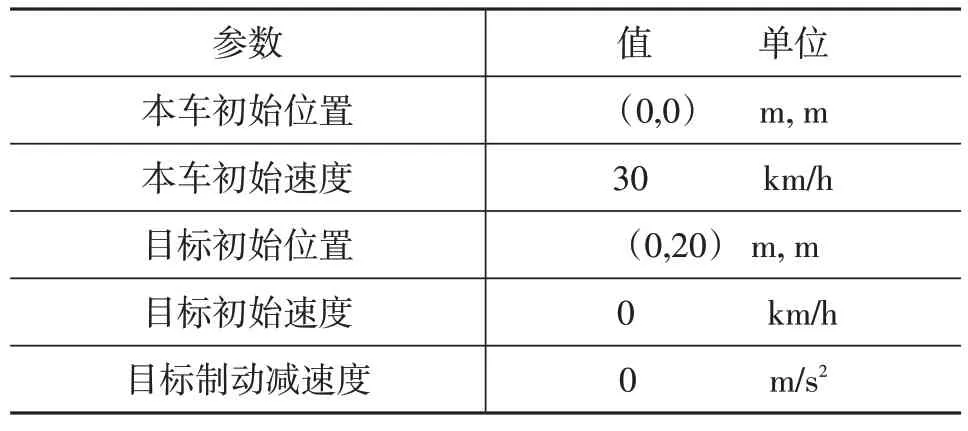
表4 初始条件设定
在示例1中,目标前车处于静止状态,本车在神经网络控制下的制动跟停,其速度和加速度曲线如图4和图5所示,本车与目标车的相对距离变化曲线如图6所示。
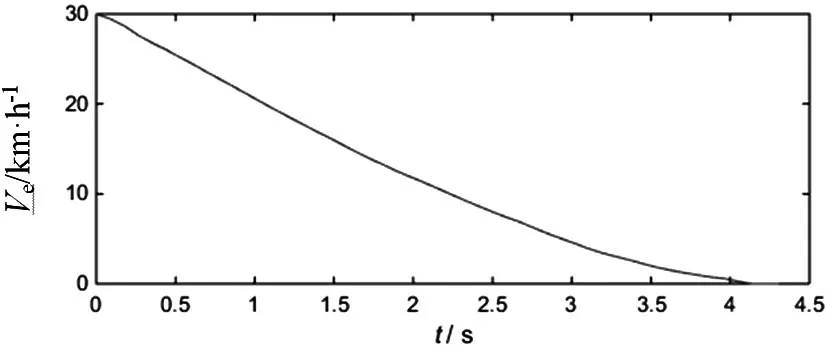
图4 本车速度曲线
示例1 的Prescan 软件在环虚拟重构结果如图7所示。
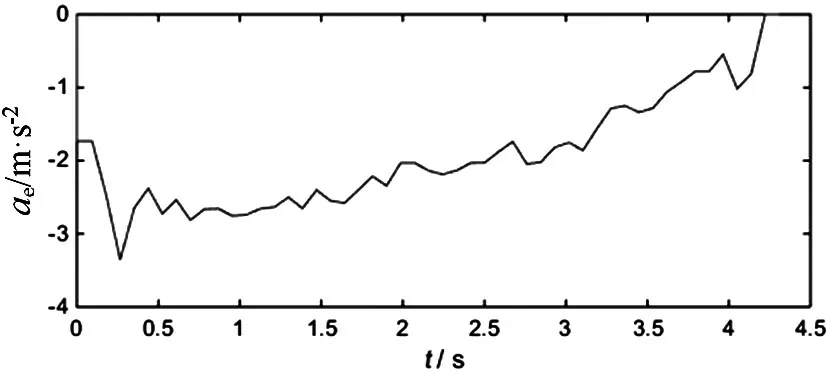
图5 本车加速度曲线
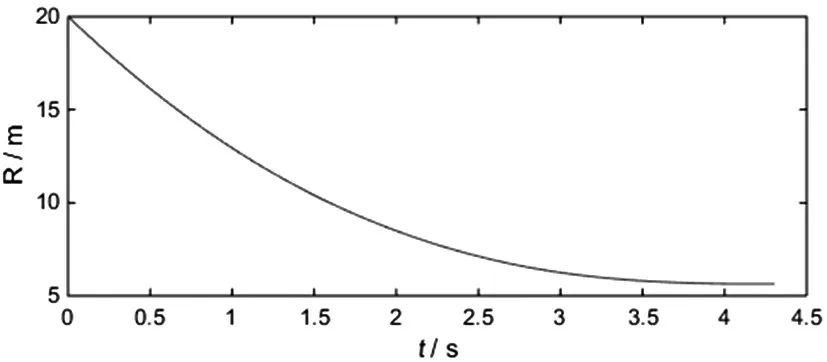
图6 相对距离变化曲线

图7 示例1虚拟重构结果
重构场景实例2为目标处于制动减速状态的跟停场景,重构的道路设置、本车初始条件设定、目标前车初始条件设定结果如表5、表6所示,十字路口信号灯选择机动车信号灯(横置式)。
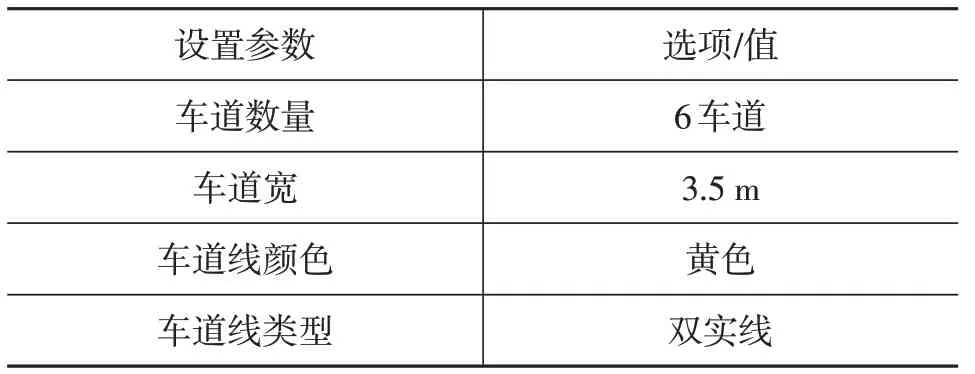
表5 道路设置
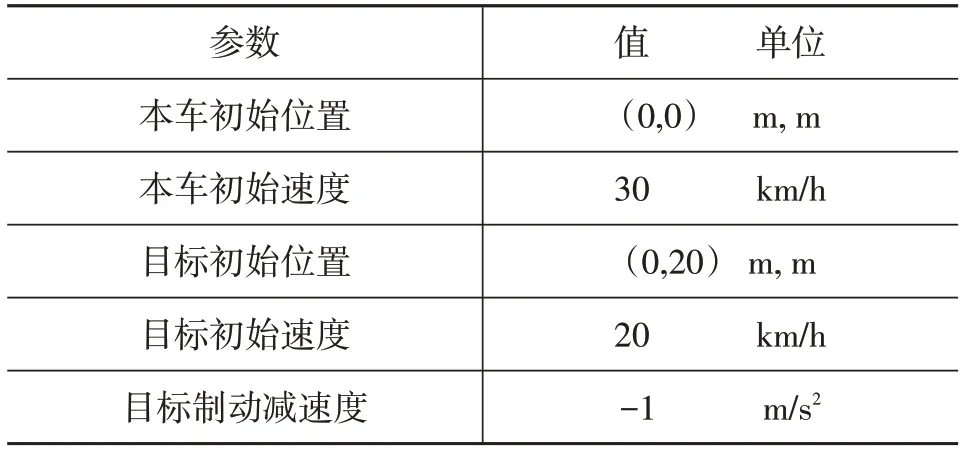
表6 初始条件设定
在示例2中,目标前车做匀减速运动,其速度曲线图如图8所示,本车在神经网络控制下跟随前车制动跟停,其速度和加速度曲线如图9、图10所示,本车与目标车的相对距离变化曲线如图11所示。
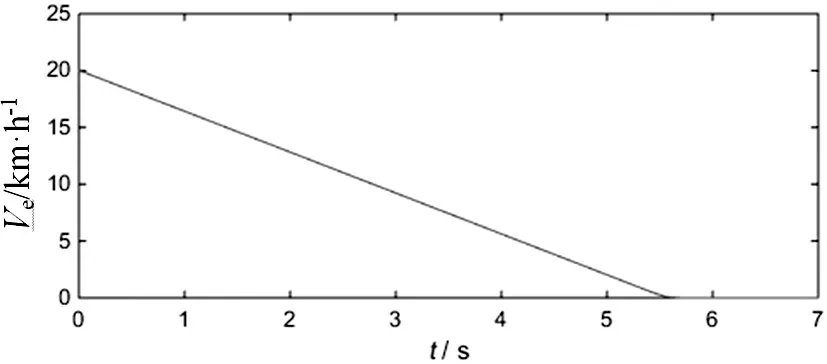
图8 目标速度曲线
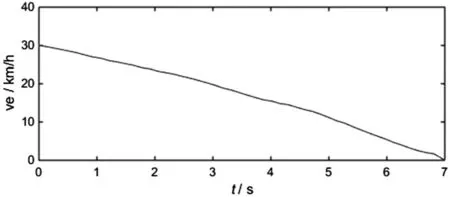
图9 本车速度曲线
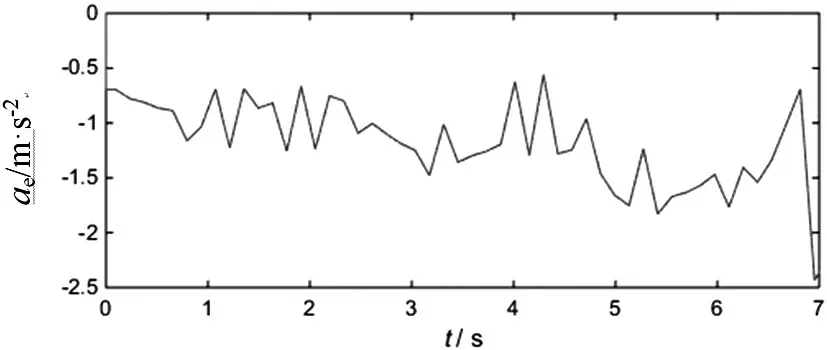
图10 本车加速度曲线
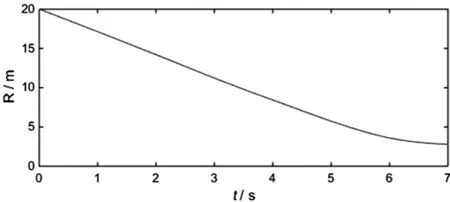
图11 相对距离变化曲线
示例2 的Prescan 软件在环虚拟重构结果如图12所示。

图12 示例2场景重构结果
4 结论
本文提出了一种基于Prescan 的信号灯路口跟停场景虚拟重构方法,该方法通过道路环境建设模块、初始条件设定模块和车辆控制模块,对目标车辆静止和目标车辆制动减速的2 类信号灯路口跟停场景进行道路环境和车辆行驶路径的虚拟重构。未来将围绕包括行人、自行车、摩托车等非机动车目标的跟停场景。
猜你喜欢
科学技术与工程(2022年30期)2022-12-05 12:43:50
机械设计与制造(2022年5期)2022-05-19 03:33:52
摄影世界(2022年1期)2022-01-21 10:50:14
重庆大学学报(2021年12期)2022-01-12 02:56:56
小学科学(学生版)(2019年3期)2019-03-30 01:39:28
知识经济·中国直销(2018年12期)2018-12-29 12:22:14
小天使·一年级语数英综合(2018年6期)2018-06-22 10:25:54
商周刊(2017年6期)2017-08-22 03:42:36
山东大学法律评论(2016年0期)2016-08-16 03:24:12
华人时刊(2016年19期)2016-04-05 07:56:05