基于某加工中心自动换刀机械手的仿真优化
2021-04-02 04:57赵向杰房栓娃
粘接 2021年3期
赵向杰,房栓娃
(西安航空职业技术学院 航空制造工程中心,西安 710089)
在现代制造加工业中加工中心的作用越来越显著,其中,自动换刀装置的换刀速度以及稳定性又是影响生产效率的重要因素。目前市场上主流的自动换刀系统一般由存储刀具的刀库、及执行换刀动作的机械手、驱动刀库和机械手运动的驱动装置组成。
自动换刀机械手作为自动换刀装置的核心部件,是实现换刀过程快速、稳定的根本保证。其作用是实现在换刀过程中刀具的交换及插拔,应具有响应速度快、运行平稳、工作可靠等特点。在实际加工过程中,锁紧机构的磨损,应力集中问题,定位误差,转动惯量较大等问题导致了较高的故障率,比如抓刀不稳、机械手动作不到位、掉刀等故障。针对以上问题,国内外众多专家学者进行了大量的研究工作。李剑玲等运用优化设计的方法设计了一种适用于立卧两用换刀场合的机械手卡爪机构[1]。陈爱虎与罗生梅通过系统的建模,静力分析和模态分析,得到整个装配体的位移和应力以及它的固有频率、振型,然后将优化前和优化后的机械手进行对比,最终达到了有效减小数控机械手误差的目的[2]。牛军燕等通过ANSYS对机械手手爪进行建模和分析。得出了机械手手爪的应力应变图和手爪的薄弱环节,最终设计出了综合性能良好的机械手手爪[3]。张祺等通过控制PLC 编程改进控制系统,一定程度上达到了换刀快速稳定的目的[4]。夏仰球通过可靠性试验装置的设计,建立了系统的动力学模型、精度模型和运动学模型,采用蒙特卡罗随机抽样的方法,对广义机构工作的可靠度进行了计算,并对机械手系统的关键部件进行了分析。最后,针对影响机械手换刀动作精度的因素,建立精度影响模型,并对可靠性进行了分析[5]。
本文以某加工中心的自动换刀机械手为研究对象,分析该机械手存在一定的应力集中问题,同时,转动惯量较大导致换刀速度较慢和稳定性较差,结合以上学者的研究经验,在SolidWorks环境下建立该型号换刀机械手的三维模型,再利用ANSYS Work-bench 软件对其进行静力学分析,得到其应力和应变云图,找出机械手的薄弱环节,对薄弱环节进行加强,再利用Shape optimization模块中对其结构进行改进设计,最终达到质量下降,转动惯量降低的目的,为后续物理样机的生产提供了依据,同时也对提高换刀过程的稳定性和换刀速度具有重要的意义。
1 自动换刀机械手的建模
由安装图纸结合实际测量,在SolidWorks 环境下建立的三维模型如图1所示。

图1 自动换刀机械手模型Fig.1 Model of automatic tool changer manipulator
在图1的三维模型中,卡刀轴与换刀臂之间存在一个弹簧,在工作过程中,换刀机械手中轴带动换刀臂旋转,在旋转过程中,刀柄和卡刀轴接触,卡刀轴受力,沿轴的方向运动。当刀柄完全被刀爪抓住时,卡刀轴受到弹簧的力弹起,固定住刀柄,然后刀柄随轴转动至另一侧,从而实现换刀。具体换刀过程为:接到换刀指令后,刀库将待换刀具转到指定换刀位置,机械手在升降液压缸的作用下到达待机位置。换刀臂在转位液压缸的作用下逆时针旋转90°,两个手爪分别抓住刀库和主轴上的刀柄。刀具的自动夹紧机构松开刀具,换刀臂下降,同时将两把刀具拉出。换刀臂旋转180°使刀库刀具与主轴刀具彼此交换位置。机械手上升,将刀具分别插入主轴刀库和锥孔内,刀具的自动夹紧机构将刀具进行夹紧。机械手顺时针旋转90°,回到原始位置。
2 机械手的优化设计
优化设计是选取适当的设计变量,建立优化问题的目标函数和约束条件,从而求出最优解。在换刀机械手的高速转动的过程中,影响其换刀性能的主要因素是转动惯量,因此如何减少转动惯量的影响显得尤为重要,转动惯量的大小不仅和物体的质量有关,还与机械手的形状密切相关。它可以对机械手的整个夹持部分和臂架进行优化,这样不仅可以找到机械手在换刀过程中的参数性能要求,而且可以找到机械手夹持部分结构的合理布局,最终达到降低机械手质量的目的。
2.1 建立有限元模型并进行静力学分析
由于结构较复杂且是装配体,可适当简化模型,将SolidWorks模型导人ANSYS Workbench中并定义材料属性,手臂和卡爪均采用45 号钢,其主要力学性能为:弹性模量为209GPa;泊松比为0.269;密度为7890kg/m3。软件可自动划分网格,对机械手进行静力学分析,以顶座为固定端施加约束,由于外力只有抓刀时刀具的重力,查表可得常用刀具重量为10kg,故简化为100N 的两个力,对受力区域分别施加。然后对机械手的总变形和总应力进行求解,从而得到具体的分析结果如图2 和图3 所示,由结果可知,其受力情况良好,变形较小。
由材料力学知识可知,应力集中和应变问题通常出现在材料厚度锐变区域,越往固定端越大,考虑到有时需要加载重刀的情况,如果将载荷增加到500N,由图4和图5可知,机械手应力集中问题较为严重。为考虑安全性,可将机械手薄弱环节即卡爪与手臂连接部位加厚。

图2 夹持轻刀应力图Fig.2 Stress diagram of clamping light knife
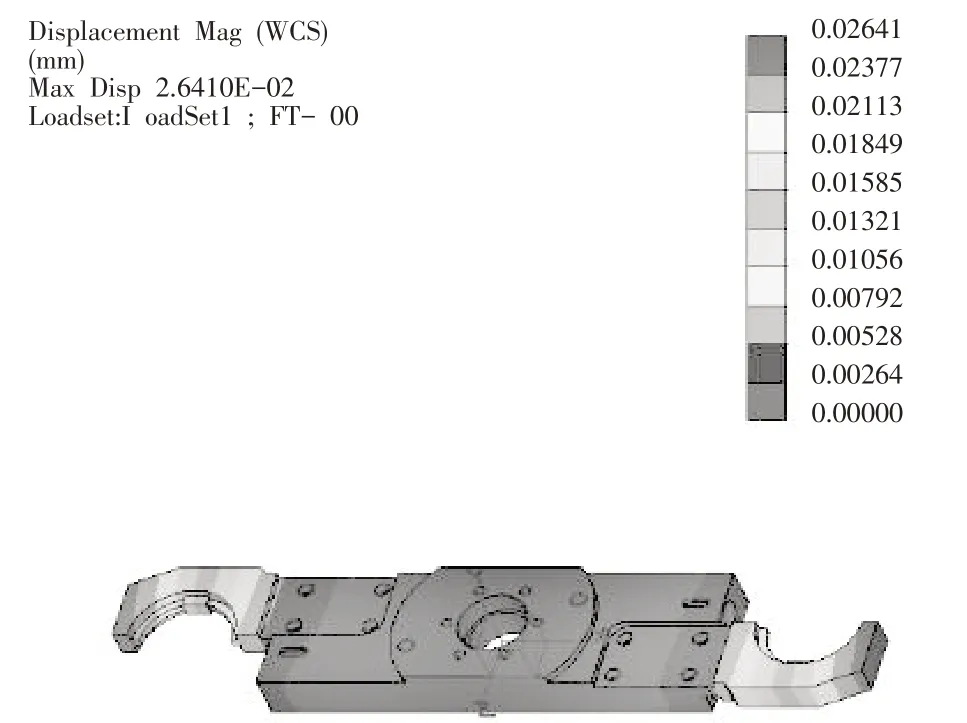
图3 夹持轻刀应变图Fig.3 Clamping light knife strain diagram

图4 夹持重刀应力图Fig.4 clamping heavy knife stress diagram

图5 夹持重刀应变图Fig.5 Clamping heavy knife strain diagram
2.2 机械手的拓扑优化
拓扑优化是根据给定的负载情况、约束条件和性能指标,在给定的区域内对材料分布进行优化的数学方法,是结构优化的一种。ANSYS Workbench 中的Shape optimization模块可以直接完成拓扑优化工作。以质量减少15%为条件,以机械手卡爪和手臂为优化对象,然后根据拓扑优化结果对机械手模型施加与静力学相同的约束和载荷条件,得到的分析结果如图6和图7所示。借助软件的质量属性功能,对比拓扑优化前后参数的变化,可知最大变形从0.02641mm变到了0.02289mm。质量由原来的7.142kg下降到了现在的6.027kg。最大应力亦远小于许用应力值,满足要求。

图6 优化后的应力图Fig.6 Optimized stress diagram

图7 优化后的应变图Fig.7 Optimized strain diagram
3 结语
1)根据某加工中心的实际情况,在SolidWorks环境下实现了建模,利用ANSYS 软件找出了原结构的薄弱环节并进行了改进。
2)对卡爪和手臂整体进行优化,相比之前的重量有明显下降,保证了材料的利用率和结构的改进,质量的下降也导致了转动惯量减小,为实现换刀过程快速稳定提供了理论依据。
3)但仍需进一步研究换刀过程的可靠性问题,从而实现换刀过程的平稳、准确、快速。
猜你喜欢
装备制造技术(2021年1期)2021-05-21
湖北农机化(2020年19期)2020-12-14
制造技术与机床(2019年8期)2019-09-03
装备制造技术(2019年6期)2019-08-15
电子制作(2018年24期)2019-01-03
金属加工(冷加工)(2018年3期)2018-03-26
荣誉杂志(2017年7期)2017-08-23
计算机测量与控制(2017年6期)2017-07-01
制造技术与机床(2014年4期)2014-04-27
组合机床与自动化加工技术(2014年10期)2014-03-01