基于多尺度特征迁移学习的树种遥感分类研究
2021-03-30 01:06王妮闵婕郭家乐何念
鄂州大学学报 2021年2期
王妮,闵婕,郭家乐,何念
(1.滁州学院 地理信息与旅游学院,安徽 滁州239000;2.滁州学院 实景地理环境安徽省重点实验室,安徽 滁州239000)
随着遥感图像分辨率和分类方法的提高,遥感图像分类已成为森林资源管理和监测的重要手段[1],及时、准确地监测森林资源,掌握森林资源的变化规律,对社会、生态和经济都具有重要意义。尽管目前遥感影像分类已取得长足的进展, 但树种类型信息获取方面中仍存在很多问题, 例如分类精度不高、数据量不足、详细程度低等[2]。近十余年来, 面向对象分类方法在高分影像树种分类领域显示出巨大的潜力[3]。 Robert 等人[4]将Landsat-7TM 影像应用于俄亥俄州南部的一个地区, 采用面向对象的模糊分类方法对大面积常绿落叶林的覆盖度进行了区分。李丹等[5]使用高分影像为数据源,利用面向对象、SVM(support vector machine)和RF(support vector machine)算法对城市优势乔木进行分类。刘金丽[6]等人以黑龙江省伊春市华皮羌子林场为研究区域,基于GF-2 遥感影像数据进行了面向对象的分类分割实验。 面向对象的分类方法能够综合社区影像空间的局部均匀区域、 纹理和光谱信息的各种特征,克服传统方法的缺点。
深度卷积神经网络 (Convolutional Neural Networks,CNN)已广泛应用于遥感图像的分类、提取、识别和检索[7]。 利用深度学习对图像分类时,其分类精度、 分类时间等方面已经完全超越了传统方法[8]。 Nogueira 等[9]利用CNN 对少量标记样本进行植被物种识别。 何海清等[10]采用深度CNN 递归识别模型,成功地适应了不同尺度地物的变化,提高了场景分类的精度。 数据集的规模是影响网络性能的关键因素之一,所以CNN 中的众多参数需要大量数据来训练。 但在实际应用过程中,通常无法获得足够的数据来完成某些特定任务[11]。为克服训练样本不足的问题, 事先进行无监督的预训练过程,或者从相关和不相关的任务中转移知识。 将目标数据集运输到除去输出层的特征提取器网络中,并重复训练深度卷积层,得到新的权重[12]。
本文以QuickBird 高分辨率遥感影像为数据源,运用多尺度分割算法和迁移学习,建立了面向对象和深度特征相结合的高分树种分类模型,以期实现森林树种高精度的识别与分类。
1 实验数据与环境
本文以皇甫山国家森林公园为研究对象 (见图1)。皇甫山地处江淮丘陵区,属大别山区。 地理坐标为东经117°58′-东经118°03′, 海拔399.2m。该地区属于北亚热带湿润季风气候区北缘, 气候温和,四季分明,日照充足;无霜期220 天,年平均降水量1018.6mm,年平均气温14.3℃。 皇甫山森林资源丰富, 植物种类繁多, 占地面积高达35533km2, 森林覆盖率达96%, 是江淮地区最完整、规模最大的原生次生林景观带。皇甫林场主要分布根系发达、树冠密集、落叶丰富易分解、生长迅速、郁闭度高的树种;其中,松树和麻栎是主要树种,约占总株数的60%;数量较多的树木包括刺槐、杨树、柳树、枫香树和辅助经济树种桃树[13]。 本研究数据主要为遥感影像数据和实地调查数据,实地调查数据包括研究区2014 年森林资源规划设计调查数据和2019 年9 月实地调查数据中选取的样本。
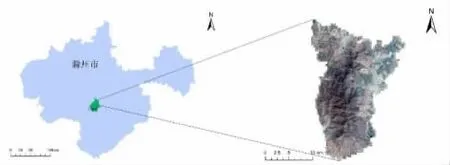
图1 研究区域位置
2 研究方法
2.1 最优分割尺度
1) 面向对象多尺度分割
影像分割的结果关系到信息提取的准确性。影像分割效果越精细时, 越符合物体边界分割的特点,信息提取的效果越好[14],技术流程如图2 所示。 本实验利用多尺度分割算法(multi- resoulution segmentation,MRS)分割影像,设定不同的形状因子、紧致度因子、分割参数等以实现最佳分割效果。MRS 算法的分割原理是从单个像素出发,由下至上进行合并;基于区域均质性和对象一致性,最大程度上优化已分割对象, 实现了同一幅图像中不同尺度像素的聚集[6]。
采用ESP 工具进行图像分割,ESP(estimating the scale parameter)[15]是由Dragut 等人开发的自动获取最佳分割尺度选择工具。 该工具通过分割结果局部方差的均值 (Li) 和相邻尺度局部方差(ROC)的差异来评估各影像地物属性的最优尺度参数, 差异曲线的峰值直接反映整个图像对象的最大异质性。 实际应用中图像往往比较丰富,ESP得到的最佳分割尺度是多个值,ROC 的计算公式如下:

式中:Li为第i 层对象层的平均局部方差,Li-1为目标层第i-1 层中对象层的平均局部方差,ROC为i 到i-1 层中局部方差变化的百分比。
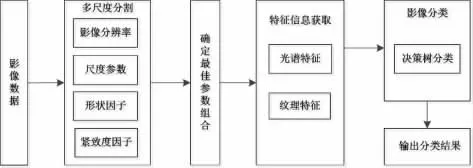
图2 面向对象分类技术流程
2) 多层次分割参数获取
为了确定最佳分割参数, 需要调整形状因子和紧致度因子。 分割实验在尺度参数为30-200(以10 个单位递增)的范围内进行;为了确定最佳分割参数,需要调整形状因子和紧密度因子。 首先将形状因子和紧致度因子分为三类,(1)形状因子为0.4,紧致度因子为0.6;(2)形状因子为0.5,紧致度因子为0.5;(3)形状因子为0.6,紧致度因子为0.4。 根据分割效果,通过目视判读,在小尺度范围内确定各特征的合适分割范围。 树种适宜划分范围为30~80,耕地为50~80,建筑用地(房屋、道路)适宜划分范围为80 以上,水体适宜划分范围为60 以上,采伐迹地适宜划分范围为70 以上。
通过比较相同尺度参数下不同形状因子和紧致度因子的分割效果,结果表明:(1)当形状因子为0.4 时,影像分割对象与地物边界重合度高于形状因子0.5、0.6;(2)当紧致度因子为0.6 时,影像分割更为精细,地物分割更为准确;(3)当采用传统方法的0.5 形状因子和0.5 紧致度因子分割影像时,分割效果不理想,地物边界分割不明显;(4)当紧致度因子大于形状因子时, 分割结果更符合本研究区的边界特征。
通过上述实验,目视判断30-130 尺度参数下的影像分割效果。 结果(见图3)表明,同一尺度下分割对象与研究区树种区域吻合程度不同。
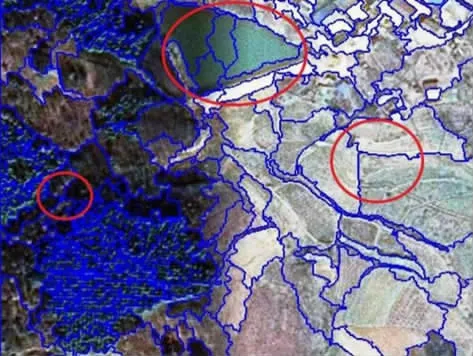
图3 分割参数为60;0.5;0.5 时采伐迹地 (右)、 水体(中)以及树种(左)
通过试验确定了形状因子和紧致度因子。 在0.4;0.6、0.5;0.6、0.5;0.6 和0.4;0.5 的 条 件 下,用ESP 工具得到了形状因子和紧致因子的最佳分割尺度值,然后根据每个特征的合适分割范围,选择三组因子下各特征的合适分割尺度参数, 通过目视判读三种不同因子参数下的分割结果, 得出每种地物的适宜分割尺度参数。 结果见表1。
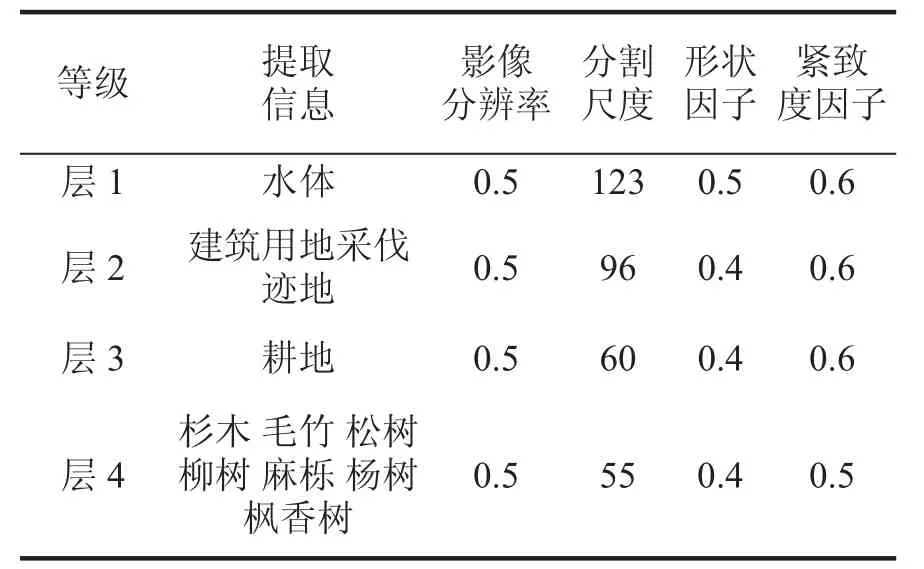
表1 多层次分割参数设置表
2.2 对象特征分析及特征优选
1) 对象特征分析
遥感影像数据分析的基础是光谱特征[16]。 它是由实际地物的组成和影像的成像状态决定的固有的光学和物理性质;主要包括灰度、色调、颜色等。 影响森林树种光谱特征的参数包括各波段的平均值、各波段的标准差、各波段比率等[17]。
影像数据分析的另一个重要特征是影像纹理。 灰度共生矩阵(Gray Level Co-occurrence Matrix GLCM)的统计方法是由R.Haralick 等人提出。它是一种能计算局部或整个区域内两个像素或两个像素之间在一定距离内的灰度值的关系矩阵;通过描述灰度空间相关特性来描述纹理, 反映森林树种纹理信息的参数主要有:均值、方差、熵和均质度等[18]。
2)对象特征优选
分类研究过程中特征对象的选择十分重要,关键特征的数量不同树种分类结果不同,因此,本实验将提取大量的对象特征[18]。 本实验基于分割结果分别提取了对象的属性特征, 属性特征描述见表2,特征分为光谱属性和纹理属性。 其中光谱属性分别为1-3 波段的光谱平均值、标准差、波段比率, 纹理属性分别为各波段的GLCM 一系列参数,如同质性、差异性、熵、对比度等。
2.3 CART 算法
本研究采用CART 分类器对样本树种进行分类。 CART(Classification and Regression Tree)决策树算法的原理是将训练样本数据集划分为实验变量和目标变量,通过双变量的周期分析的循环分析,形成二叉决策树;与其他决策树模型相比,CART 决策树在每个步骤中最小化分类的不纯洁程度, 通过递归分区将训练记录分成组, 然后在每个节点上自动选择最合适的预测变量; 如果一个节点中100%的观察值都属于目标字段的同一类别, 那么认为该节点“纯洁”; 目标变量和预测变量字段可以是区间字段或分类字段;每个节点都采用二元划分的形式。结合遥感影像信息提取,目标变量为实际地物类型,预测变量为地面样本的特征[17]。
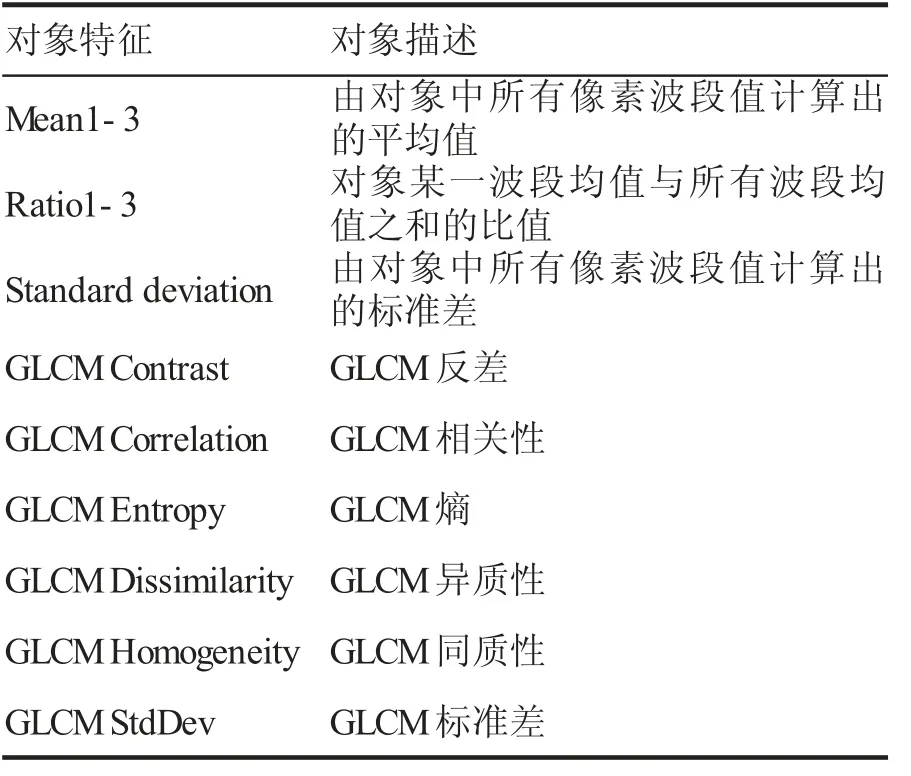
表2 对象特征与描述
CART 分类树通过计算每一组特征的Gini 系数增益确定决策树划分的优先规则; 采用二分划分形式,当一列特征有K 个类别,第k 个类别概率为Pk时, Gini 系数计算公式为:

2.4 结合深度迁移学习的高分影像树种分类模型
深度卷积神经网络已经被广泛应用于树种分类中, 为解决深度卷积神经网络需要百万数量图像集的问题, 本文将深度迁移学习的方法应用于高分影像树种分类中。 利用迁移学习的方法,将源领域和目标领域的数据从原始特征空间映射到新的特征空间中, 这样可以减少人工标注数据的工作量和模型的训练时间[20]。
采用基于ImageNet[21]训练的大型卷积神经网络VGG16 作为迁移学习模型。树种分类模型的结构主要包括以下两个部分:(1) 利用VGG16 模型参数初始化深度卷积神经网络,同时VGG16 作为特征提取器,可对树种图像进行特征提取。解决了层数增加期间的梯度下降问题, 提高了尺度缩减过程中特征提取的精度。 (2)在训练后的模型中,利用全局平局压缩参数,在网络末端添加1024 个节点的全连接层和7 个节点的softmax 分类器层; 采用反向传播和Adam 优化算法对网络进行训练[13]。
VGG16 是由Simonyan 和Zisserman 提出的卷积神经网络模型。VGG16 模型通过反复叠加3x3 个小卷积核和2x2 个最大池化层, 成功构建了16/19层深的卷积神经网络; 该模型主要将传统卷积层提升到卷积块,卷积块由2-3 个卷积层构成,同时多次使用线性整流函数(ReLu)激活函数增加线性变换,使之具有更强学习能力及特征提取能力[22];最后在训练时和预测时使用Multi-Scale 做数据增强,并采集各种不同旋转角度的图像作为数据集, 有利于提高深度学习的鲁棒性。训练时将样本先上下、左右翻转后逆时针90 度翻转。 增加了数据量。
在实验中, 将树种影像转换成224×224×3 的数字矩阵输入网络。 在第一个卷积层中使用64 个3×3 大小的卷积层进行卷积和激活操作; 其后作2×2 的最大池化层并使用128 个3×3 的卷积核作三次卷积和激活操作,尺寸变为112×112×128;在后面几个普通卷积层中进行类似操作, 得到特征向量尺寸为7×7×512;随后进入1×1×1024 的全连接层;最后通过softmax 输出1000 个预测结果。
3 实验结果与分析
应用本研究方法于皇甫山森林公园Quick-Bird 高分辨率影像中的树种分类, 并通过实地调查和目视判读验证分类结果的准确性。 首先,利用多尺度分割技术对部分遥感图像进行分割, 利用ESP 尺度参数评价工具,得到最佳分割尺度为55,最佳形状因子为0.4,紧致度为0.5;在此基础上提取树种的光谱特征和纹理特征,建立分类规则,获得树种分类样本集。本文采用预训练模型VGG16,模型输入大小为224×224 像素,模型训练中,设置速度衰减周期为100epoch,Batch size 为32。Adam算法中初始学习速率为0.0001,epsilon 设置为10-8。 本文采用TensorFlow 框架中的TensorBoard可视化工具制作曲线图, 利用曲线图分析不同参数下运行时间及迭代次数的变化趋势。
训练过程中的精度和损失变化曲线如图4 所示。 在前30 个迭代,模型的精度迅速提高,损失迅速减少;经过30 个迭代后,网络参数基本稳定。 利用预训练模型VGG 初始化网络参数,可以有效地加快网络训练速度,避免过拟合问题。
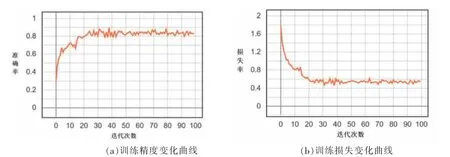
图4 训练精度及损失变化曲线
为研究本文算法的有效性, 将其与传统CNN模型进行比较,表3 的实验结果表明,本文分类方法在研究区的森林树种分类中, 准确率和kappa系数可达84.5%和0.81, 比传统CNN 高12%和0.13。 除此以外,本方法可解决样本过少导致过拟合的问题, 分类效果远高于未迁移学习的分类模型。 因此,该方法对高分影像树种具有较高的识别和分类功能。
为探讨不同模型对树种分类的影响,本研究分别用ResNet50 和VGG16 预训练模型训练网络。VGG16 和ResNet50 输入图像大小为224x224pixel,2 个模型在相同的环境下进行训练。 表3 的结果显示:两种基于迁移学习得到的分类模型的总体精度、kappa 系数均优于传统CNN 分类算法;VGG16的分类效果更好,其原因是树种影像不同于自然影像,没有非常复杂的语义特点,所以相对较小的卷积神经网络更容易取得良好的效果。

表3 皇甫山高分影像树种分类精度评价
4 结论
本实验基于皇甫山QuickBird 高分辨率影像,采用面向对象方法制作样本集并输入深度迁移学习模型进行森林树种分类。 研究表明:(1)相对于传统CNN, 基于深度迁移学习的高分影像的树种分类提高了分类精度,减弱了椒盐噪声的影响,加快了损失率的下降速度。 (2)本文采用面向对象的分类方法, 通过使用ESP 多尺度分割工具确定最优分割尺度,节约了人工提取的时间,提高了分割精度,较好地区分了森林特征,有效地避免了树种与其他特征的混淆。 (3) 利用少量的标注树种影像,实现了端到端的高分辨率影像分类,解决了训练深度卷积神经网络需要百万数据集的问题。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06
意林·少年版(2020年17期)2020-10-12
发明与创新·中学生(2020年4期)2020-04-17
电子制作(2019年13期)2020-01-14
电子制作(2019年11期)2019-07-04
北京航空航天大学学报(2018年1期)2018-04-20
现代园艺(2018年2期)2018-03-15
太空探索(2016年5期)2016-07-12
时代英语·高三(2014年5期)2014-08-26