
浅谈地下铲运机司机室的设计
2021-03-25 08:44邓志锐赵金元
有色设备 2021年1期
邓志锐 ,赵金元 ,刘 威
(1.中钢集团衡阳机械公司,湖南衡阳 421002;2.长沙矿山研究院有限责任公司,湖南长沙 410012)
0 前言
随着地下矿山的开采,无轨设备使用越来越多,地下铲运机作为主要采矿设备,其作业环境十分恶劣、弯多、坡多、道路窄、路面条件差,而且在封闭的环境作业,没有自然光,灯光强度往往不足,犹如在黑暗中作业。再加上地下无轨釆矿车辆在矿井作业,其外形尺寸受到巷道尺寸的限制,具有矮、长和窄的特点,还有低矮型地下铲运机、超低矮型地下铲运机之分,致使司机座位极低,空间狭窄,司机室因空间限制设计多样化[1-2],外形结构有双柱顶棚、四柱顶棚、全封闭式,如图1 所示。司机室结构安全、工作空间大小、操纵舒适性、视线能见度、控制元件位置合理设计,不仅影响生产效率,直接关系到司机的安全健康,如何正确设计合乎要求的司机室对司机的安全十分重要。
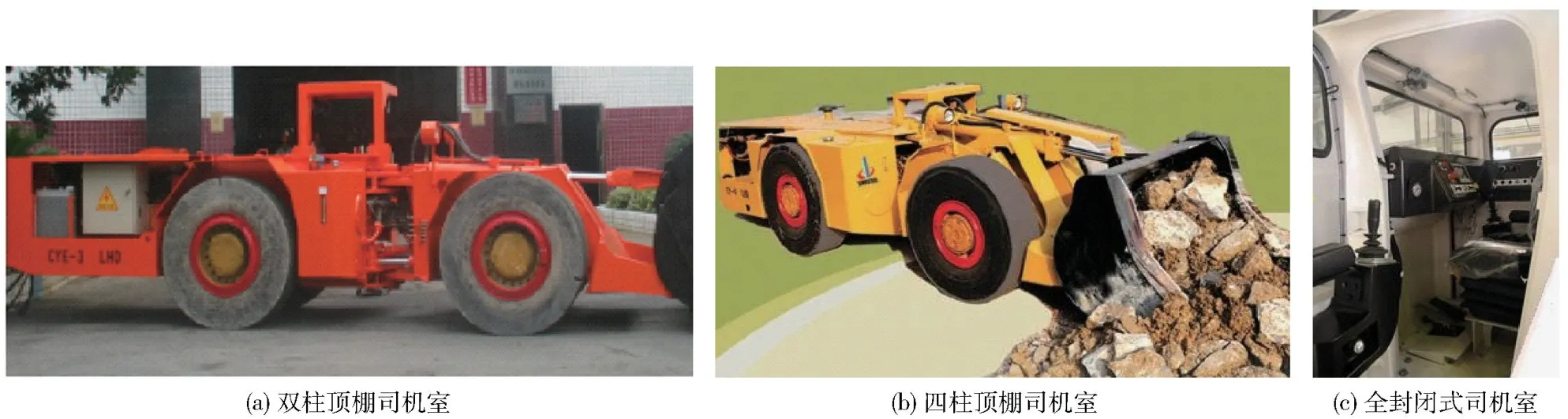
图1 司机室外形结构
1 司机室的设计
司机室的设计的内容包括司机室的位置、座位、控制器、操纵杆、踏板、紧急停车、仪表盘、附件存储、出入口的设计。
1.1 司机室的位置
司机室的位置,有的在前车架一侧;有的在后车架一侧。司机室在前车架一侧,如图2 所示。由于离工作机构很近,司机容易受到铲斗溢出的物料伤害。司机室在后车架一侧,司机的能见度较差,但安全性好。两种方式各有优点和缺点,应根据地下铲运机的具体情况选择。司机室的内部布置、内部空间应符合有关标准的要求。司机室位置与结构不应干涉司机的视野,司机室内工作区不能存在任何可能损伤操作者的锐角、利棱、凹凸不平的表面和凸出的部位。
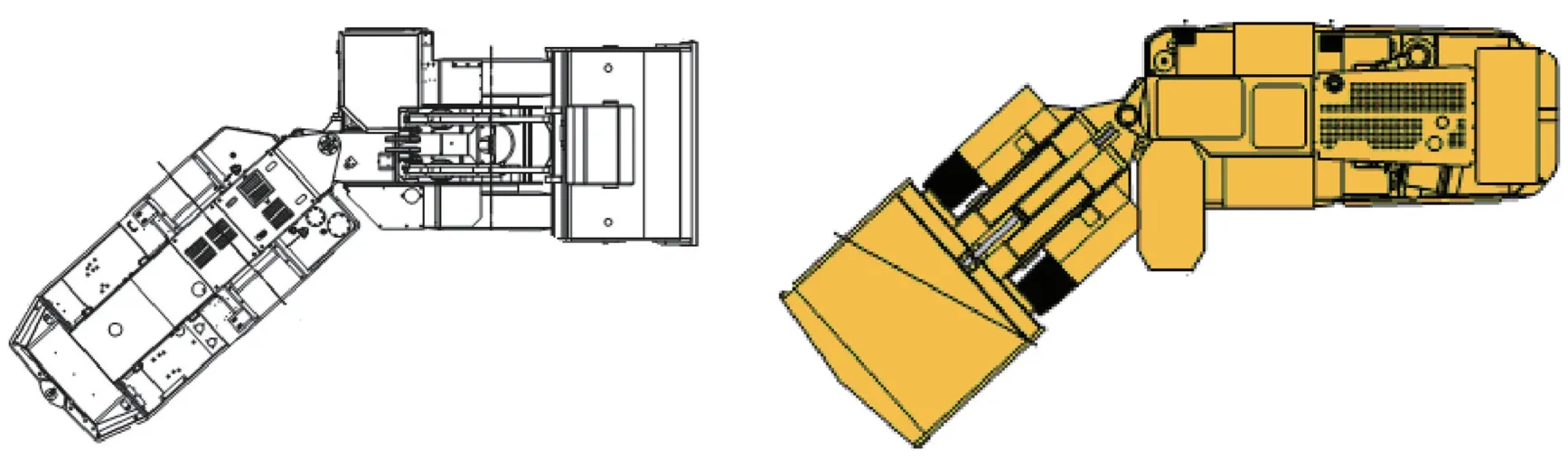
图2 司机室的位置
1.2 座位
座位设计一般包括座位底坐、靠背、头靠、扶手和悬浮装置设计。由于车辆司机室空间限制和方便司机入坐,一般座位不安装扶手。对超低矮型地下铲运机来说,无法安装悬浮装置,只能安装一定厚度的泡沫弹性坐垫,司机需躺着操作。对低矮型地下装载机来说,根据机型的不同安装座位,有的座位可以安装悬浮,有的不可以安装,司机可坐着或躺着操作。无论是坐着还是躺着操作,座位的设计应满足人机工程学原理:满足第5 百分位数到第95 百分位数人群身体尺寸;能最大限度地吸收振动;能舒适地操作;能方便维修;能最大限度的保证司机的视觉;能安全的承受司机的大部分重量;坐垫、腰靠、扶手的覆盖层应柔软、防滑、透气、吸汗、无毒。
1.3 控制器
控制器包括操纵杆、脚踏板、紧急制动、仪表盘、矿工帽和矿灯蓄电池、附件等。
1.4 操纵杆
各操纵杆必须布置在司机的操纵舒适区及可及范围;操纵力、操作方向、操作速度、操作行程都应与人的施力和运动输出特性相适应。操作杆、按钮与相邻零件之间必须保持一定的间隙,操纵杆的操作运动与显示器或被控对象,应有正确的运动协调关系,此种关系应与自然的人为倾向一致。
1.5 踏板
脚踏板一般有油门踏板与制动踏板两种。油门踏板由于经常操作,一般放在座椅前右侧,制动踏板一般不经常操作,放在座椅前左侧。油门踏板和制动踏板必须要在司机的操作舒适区和可及范围。脚踏力应小于有关标准的规定,踏板之间、脚踏板与相邻零件之间的间隙都必须保持一定的距离。脚踏板与座位必须保持适宜的位置关系,有利于人向踏板施力。
1.6 紧急制动
若设计手启动或按钮启动,考虑到用右手很快而且很容易从司机室内或室外(贴着驾驶室)启动,应将紧急制动布置在司机的右侧。另一个紧急制动应放在机器另一侧的后面,通过两个紧急制动,我们可以从机器两侧使用紧急制动来确保车辆、司机与周围人员的安全。
1.7 仪表盘
仪表盘应布置在可视区内。当仪表盘的仪表数量较多时,对它们的排列可根据它们的功能分区排列,区与区之间应有明显区别。最常用、最主要的仪表应尽可能安排在视野中心3 度的范围内,一般性仪表可安排在20~40 度视野范围内,次要仪表应安排在40~60 度的范围内。
1.8 附件存储
司机有时要脱掉他们的矿灯帽和电池包,因此必须设置此物存储的地方,该地方应方便司机取下。
1.9 出入口
为方便司机安全顺利的进出司机室,司机上、下司机室能同时使用一只脚和两只手,或一只手和两只脚三点着力的装置。为从地面进入到司机室和坐着位置的司机提供抓手。抓手的表面不应粗糙,不能有伤手的尖角或延出物。
2 摄像机系统的设计
摄像机系统是为了帮助低矮型LHD 司机在坑道内驾驶时能看到前面、后面和右侧面,从而提高司机驾驶时的能见度,增加司机与车辆安全。为了有最大的视野,摄像机的镜头应布置在地下装载机的右前方和后左侧。监视器应布置在司机室的中央和司机头部正前方视野最大、障碍最少的地方。
摄像系统是由彩色(或是黑色和白色)监视器、视频开关、前后摄像机、24 V 直流电源和组成,其原理如图3 所示。

图3 摄像系统原理图
监视器外壳装在车辆仪表板上,它由彩色监视器,“前进”和“后退”手动操作按钮和视频开关继电器组成。继电器是由车辆变速箱“前进”和“后退”信号控制。
按钮亮,说明摄像机在工作,该指示灯由车辆变速箱或手动操作按钮控制。
在监视器内,调节电位计可用来调节LCD 监视器、颜色、亮度和对比度。
可采用两种摄像系统,摄像机器在十分牢固的特别设计的壳体内,保护摄像机及镜头以防止碎石和灰尘的破坏。
摄像机电缆绳包括DC 电缆和同轴电缆。PMA柔性管保护DC 电缆和同轴电缆。两端联接的安全由重型圆形连接器保护。摄像机配置了广角镜头,以扩大司机的视野。电缆有各种长度,以备任何LHD 的需要。
3 地下铲运机能见度设计要求
为了使接近车辆的矿工危险性最小,个子低的司机必须能看到主要区1 m 高以上、次要区1.3 m以上目标。该区取自车辆外围0.5 m 的距离范围,如图4 所示。

图4 人机工程学项目
在考虑了这些观察目标时,视线限制是由于采用了低座椅和为了方便司机向前、向后驾驶,司机室定位在车辆中部而产生的。对前主要区的观察应考虑装满物料的铲斗和平台上大的装载物。
为了满足司机能观察这些目标,还要考虑:在设计驾驶棚支承、大灯、仪表盘和盖板时,要避免妨碍司机对车辆周围临界区的观察[3]。
4 落物保护结构试验与翻车保护结构试验
落物保护结构试验(FOPS)即司机室顶部设置加强防护顶板,防止被具有一定能量落物击穿或过量变形。翻车保护结构试验(ROPS)即车辆发生倾翻时,避免或减少司机伤亡的保护装置。这两种保护结构试验包括:试验设备、试验条件、试验方法或试验程序、试验结果分析与评估及试验实例等几项内容[4]。
落物保护结构试验设备:试验用落锤是两端直径不同的标准钢制圆柱体,柱体形状及参考尺寸如图5 所示。试验控制的参数是重锤自由落下碰撞到试件时,产生的能量为11 600 J。落锤的质量及尺寸随坠落高度的不同而有所改变如图6 所示。当落锤提升到需要的高度释放时,不能受任何妨碍。注:若落锤质量为227 kg,d=255~260 mm,l=583~585 mm。其坠落高度可由图6 查得。

图5 标准落锤
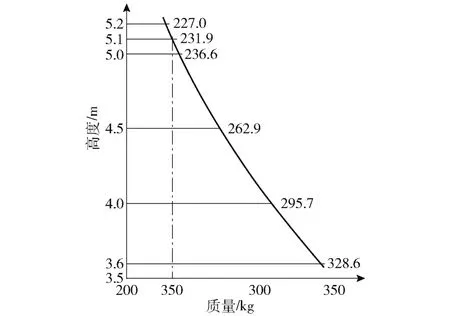
图6 产生11 600 J 能量矽形的落锤高度和质量关系曲线
对翻车保护结构进行试验时,在水平面内沿侧向、纵向和垂直方向(如图7、8、9 所示)由油缸加载,油缸的推力和行程应满足试验要求。试验过程中应随时测量施加给翻车保护结构的力和施加给框架的力以及框架的变形。力的测量可用力传感器或加载油缸上压力传感器;位移测量可采用位移传感器。力与变形的测量精度应为测量最大值的±5%。

图7 油缸横向加载

图8 油缸纵向(沿车辆纵向)加载
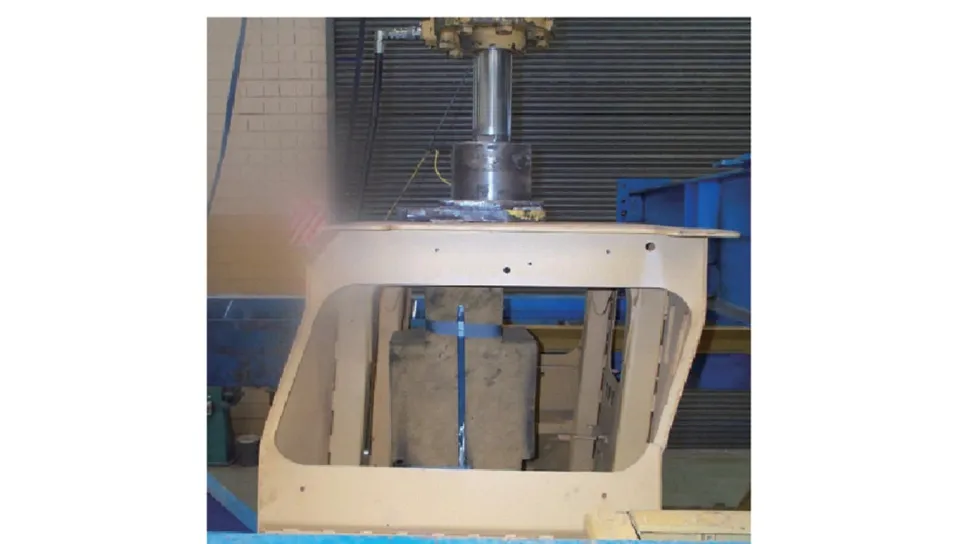
图9 油缸垂直加载
5 结束语
地下装载机司机室的设计受到巷道尺寸的限制,司机室空间设计有一定难度,结构紧凑,但必须保证方便司机出入,安全性要满足FOPS/ROPS 试验要求,要设计出一个全新型的驾驶室要遵循上述原则和要求,外观造型尽量设计美观[5]。
猜你喜欢
车主之友(2022年6期)2023-01-30
中国设备工程(2021年20期)2021-11-10
有色金属(矿山部分)(2021年4期)2021-08-30
原子与分子物理学报(2020年5期)2020-03-17
金属加工(热加工)(2020年2期)2020-02-23
黄河之声(2019年23期)2019-12-17
汽车实用技术(2019年17期)2019-09-21
中国公路(2017年17期)2017-11-09
黄河之声(2017年13期)2017-01-28
华北水利水电大学学报(自然科学版)(2014年1期)2014-02-27
