基于C#和SMART的机器人涂胶装配工作站的设计与仿真
2021-03-24 16:20刘海燕
柳州职业技术学院学报 2021年1期
刘海燕,苏 宇*,苏 磊
(1.广西科技大学,广西 柳州 545006;2.柳州职业技术学院,广西 柳州 545006)
引言
ABB机器人在工业自动化上使用比较多,一般在机器人控制器中编译Rapid程序即可,但涉及到可编程控制器PLC及视觉等外围设备时,为了实现复杂的自动化设备,需要借助ABB机器人的二次开发工具开发上位机程序用于部分控制和监控机器人的运行状况。对ABB机器人进行二次开发的目的在于能够在PC机上通过网络对机器人进行远程操控,以获取机器人的工作状态、程序数据、程序模块、IO模块等信息[1-2]。ABB机器人为使用者提供了大量便捷的二次开发及应用工具,PC SDK就是其中一项。
Microsoft Visual Studio(以下简称Visual Studio)是美国微软公司的开发工具包系列产品。Visual Studio是目前最流行的Windows平台应用程序的集成开发工具,基于.NET Framework,包括了整个软件生命周期中所需要的大部分工具[3]。本文基于汽车挡风玻璃涂胶装配的实际生产案例,采用Visual Studio的C#语言、RobotStudio的二次开发工具PC SDK等完成对虚拟机器人的控制;采用RobotStudio的Smart组件构建涂胶装配仿真系统,完成对实验平台的仿真运行。
1 实验仿真工作站架构设计
实验仿真工作站架构由上位机和下位机两部分组成:上位机基于Visual Studio开发机器人控制应用程序;下位机由RobotStudio构建的机器人涂胶装配实验仿真工作站构成。该实验仿真工作站整体框架如图1所示。

图1 实验仿真工作站框架图
2 基于PC SDK的Visual Studio二次开发
利用PC SDK对ABB机器人进行二次开发时只需要在其官网上下载相应版本的动态链接库文件。本文用到的PC SDK版本为6.07。
2.1 Visual Studio 2017
Visual Studio软件是一套完整的开发工具,可生成ASP.NET Web应用程序、桌面应用程序、XML Web Services和移动应用程序。Visual Basic、Visual C#和Visual C++都使用相同的集成开发环境(IDE),实现工具共享[4]。创建新项目时,Visual Studio会自动生成一个解决方案,可以根据需要将其他项目添加到该解决方案中。本系统使用Visual Studio Community 2017版本15.9.11,NET Framwork版本4.0以上。通过添加ABB PC SDK动态链接库,定义好命名空间ABB.Robotics.Controllers,使用Visual Studio中的C#编写PC应用程序连接RobotStudio中的虚拟机器人,实现与ABB机器人的通信及数据读取和写入。
2.2 PC SDK二次开发
PC SDK的类库被封装在不同的功能域中,其动态链接库文件通过编译软件Visual Studio引用至用C#建立的Winform项目,根据开发需求在Visual Studio中构建与PC SDK的类库相关的类,并建立起各个功能域之间的关系。
(1)建立网络扫描和连接等句柄,设置IP使用回环地址,再控制其连接界面可显示网络上所有机器人信息,包括机器人的IP地址、系统名称、虚拟控制器名称等。
(2)Visual Studio与ABB Virtual Controller建立通信,获取ABB机器人端的变量,实现机器人电机的上下电、指针复位、程序加载、程序卸载等功能,并写入挡风玻璃搬运、涂胶和装配的控制信号,生成的控制应用程序界面如图2所示。

图2 ABB机器人控制应用程序
3 RobotStudio离线编程软件
RobotStudio是ABB公司专门开发的工业机器人离线编程软件,RobotStudio基于ABB Virtual Controller,与机器人在生产中运行的软件相同,通过RobotStudio软件的在线功能和网线与机器人控制柜连接,就可以实现机器人程序参数设定、备份以及监控的功能。因此,RobotStudio可以执行非常逼真的模拟,并且可以在生产现场直接使用编程的机器人程序和配置文件[5-6]。
3.1 工作站模型
应用Solidworks软件构建汽车模型和挡风玻璃模型。汽车模型的长度为4920mm,宽度为2040mm;挡风玻璃是不规则图像,其最大长度为1400mm,最大宽度为580mm。模型如图3所示。

图3 实验平台模型图

图4 机器人涂胶装配工作站布局
机器人涂胶装配工作站布局如图4所示。搬运机器人从输送链上抓取挡风玻璃搬至涂胶区;当机器人搬运到位后,触发涂胶机器人进行涂胶;涂胶完成后搬运机器人将挡风玻璃搬运至装配区,完成汽车挡风玻璃的装配;装配结束后触发地板式传送带,将汽车移动至另一个加工工位。整个工作站流程图如图5所示。

图5 机器人工作流程图
3.2 动态Smart组件的设计
Smart组件用来制作动画仿真效果,本文通过设置挡风玻璃Smart组件、工具Smart组件、汽车Smart组件、传送带Smart组件,最终将机器人与这些工作站进行IO逻辑链接,完成挡风玻璃在输送链上的自动传送;搬运机器人夹取挡风玻璃到达涂胶工位时,发出到位信号,启动机器人涂胶作业;涂胶结束后触发搬运机器人的装配工作;装配结束后触发汽车离开涂胶工位的信号和下一辆汽车启动的信号。
3.3 机器人涂胶工作站仿真I/O信号
在企业实际生产案例中,PLC是中央控制单元,通过Profinet或Profibus等现场总线,将汽车、工业机器人、输送链、传送带等设备连接起来进行信号通信。而在仿真系统中,Smart组件可以看成是PLC,只需要将该组件的I/O信号与机器人的I/O信号进行关联,模拟PLC与机器人的信号通信实现仿真效果。以汽车Smart组件为例,设置仿真I/O信号如表1所示。

表1 汽车Smart组件所需要的I/O信号
3.4 Smart组件的I/O信号连接
Smart组件中各子组件之间的逻辑控制,主要是通过I/O信号的连接来实现,部分I/O信号逻辑连接如表2所示。

表2 汽车Smart组件I/O信号连接
4 RAPID程序编译及仿真
在搭建好各种模型和Smart组件后,可以根据工作流程要求,利用RobotStudio的RAPID离线编程功能编写和调试出相应的程序,然后进行模拟仿真查看结果是否满足要求。RAPID是一种英文的编程语言,里面包含着可以移动机器人、设置输出、读取输入等指令,还能实现决策、重复其他指令、构造程序、与系统操纵员交流等功能。搬运和涂胶机器人程序流程图如图6、图7所示。
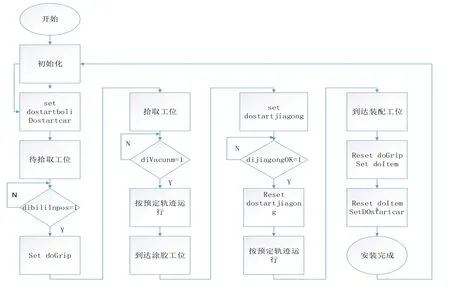
图6 搬运机器人程序流程图
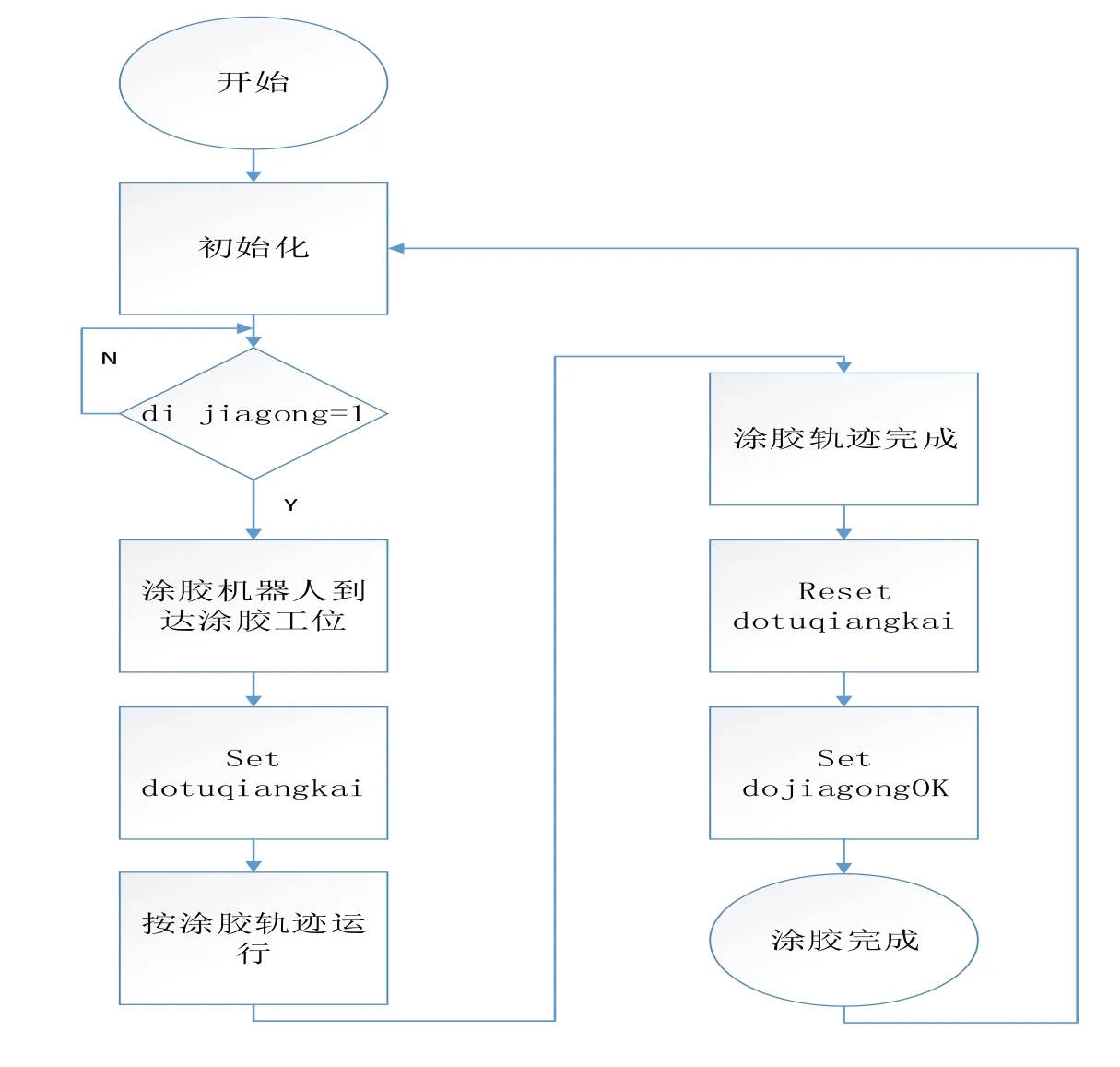
图7 涂胶机器人程序流程图
5 仿真运行
搭建了整个涂胶装配实验平台后,在Visual Studio开发的汽车涂胶和装配应用程序中启动程序,完成对虚拟控制柜的通信连接;将搬运控制信号发送给搬运ABB机器人,工作站就启动挡风玻璃的搬运任务;将涂胶控制信号发送给涂胶ABB机器人,机器人就启动涂胶任务;将装配控制信号发送给搬运ABB机器人,机器人就启动装配任务。仿真结果如图8、图9所示。
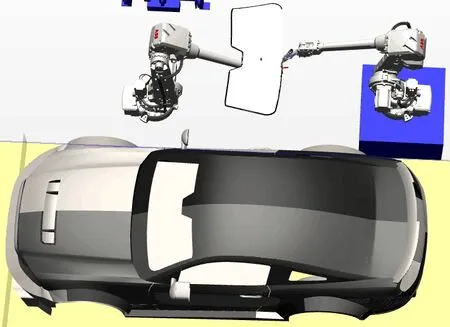
图8 Visual Studio控制ABB机器人启动搬运和涂胶工作
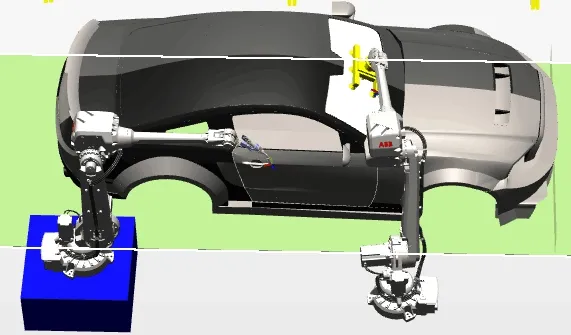
图9 Visual Studio控制ABB机器人启动装配工作
6 小结
在此仿真实验系统中需要依次完成以下工作:
(1)在Visual Studio软件下完成PC SDK动态链接库的引用、C#程序编写、window窗口搭建、与机器人通信的建立、控制信号的读取和写入、电机上下电、指针复位等程序;
(2)在RobotStudio软件下搭建汽车挡风玻璃自动涂胶与装配的工作站;在生产过程中,两台机器人相互配合,完成自动涂胶与装配工作,满足现代化汽车生产线快速、准确和柔性化生产的要求。
通过以上工作,最终完成汽车挡风玻璃涂胶和装配仿真系统的上位机设计、下位机机器人工作站的仿真运行,实现汽车生产流水线上对汽车挡风玻璃自动涂胶功能和汽车挡风玻璃自动粘贴装配功能。经过调试后的机器人操作优化了挡风玻璃的涂胶路线,同时能够保证挡风玻璃在安装上的准确性,提高汽车制造的整体质量,增强汽车的安全性,节约人力成本,减少资源的浪费。
猜你喜欢
今日农业(2022年16期)2022-11-09
公民与法治(2022年10期)2022-10-12
粘接(2021年1期)2021-06-10
电脑报(2020年32期)2020-09-06
妇女(2019年5期)2019-07-02
科技与创新(2018年20期)2018-10-30
汽车实用技术(2018年15期)2018-08-29
作文·初中版(2017年10期)2017-10-25
故事会(2017年9期)2017-05-08
中国高新技术企业(2015年12期)2015-03-31