基于一种单向滑模的某巡飞弹过载控制仿真
2021-03-24 03:13:42王泽璞梁建辉梁美美
火力与指挥控制 2021年2期
马 越,傅 健,王泽璞,梁建辉,梁美美
(1.北方自动控制技术研究所,太原 030006;2.南京理工大学,南京 210094)
0 引言
巡飞弹是无人机技术和智能弹药技术相结合的产物,它与常规弹药相比,具有在战场上空巡飞的能力,能够完成侦察监视、目标威胁、压制摧毁等任务,同时具有造价便宜,效费比高的特点,是我国新型武器装备发展的重要趋势[1-3]。
巡飞弹在飞行过程中会受到风、自身装配误差等不确定因素的干扰,使飞行器产生较大的角速度,这就对巡飞弹的飞控系统有较强性能要求。而滑模系统对控制对象的参数变化和系统的外界干扰无关,又具有较强的鲁棒性[4-7],因此,广泛地应用于飞行器的控制系统中。本文以某巡飞弹为研究对象,将法向过载作为控制量,采用一种单向滑模理论设计了控制器,与传统的滑模控制方法进行了对比,仿真结果显示该单向滑模控制方法可以很好地抑制抖振,控制效果优于普通滑模控制器。
1 飞行动力学模型
为了简化计算,在六自由度刚体弹道模型的基础上进行简化[8-9],经推导得到巡飞弹的纵向简化模型如式(1),其中各符号含义参考文献[8]。

2 普通滑模控制器设计
本节采用过载加角速度反馈来设计控制器。设计滑模变结构控制的滑模面如下:





将式(6)、式(7)带入式(3)中,整理后得


由巡飞弹纵向动力学模型能够推出角速度与过载的关系如下:

式中


整理后可得系统滑动模态特征方程为

特征方程的根与c1有关,为保证系统稳定性,利用劳斯判据可以得出有关c1的不等式。通过调整c1来移动滑动模态极点,可以改善系统动态特性。
3 单向滑模控制器设计
在实际工程应用中,由于系统存在惯性、控制时滞等原因,系统状态会在切换面上来回穿越,这样就产生剧烈的抖振现象。为了抑制抖振,下面采用一种单向滑模控制方法设计新的控制器。
单向滑模由2 个切换面s1i,s2i和4 个辅助滑模面h0i,h1i,h2i,h3i组成。如图1 所示。当系统状态在切换面上运动时,可以在2 个切换面和4 个单向辅助滑模面共同作用下趋向于原点,不会在切换面上产生高频率的来回穿越,从而达到去抖振的效果,因此,该方法被称为单向滑模[10-12]。

图1 单向滑膜控制趋近示意图
按照以上理论,选择如下的组合切换面:

图2 单向辅助滑模子空间
在图中取适当的点满足

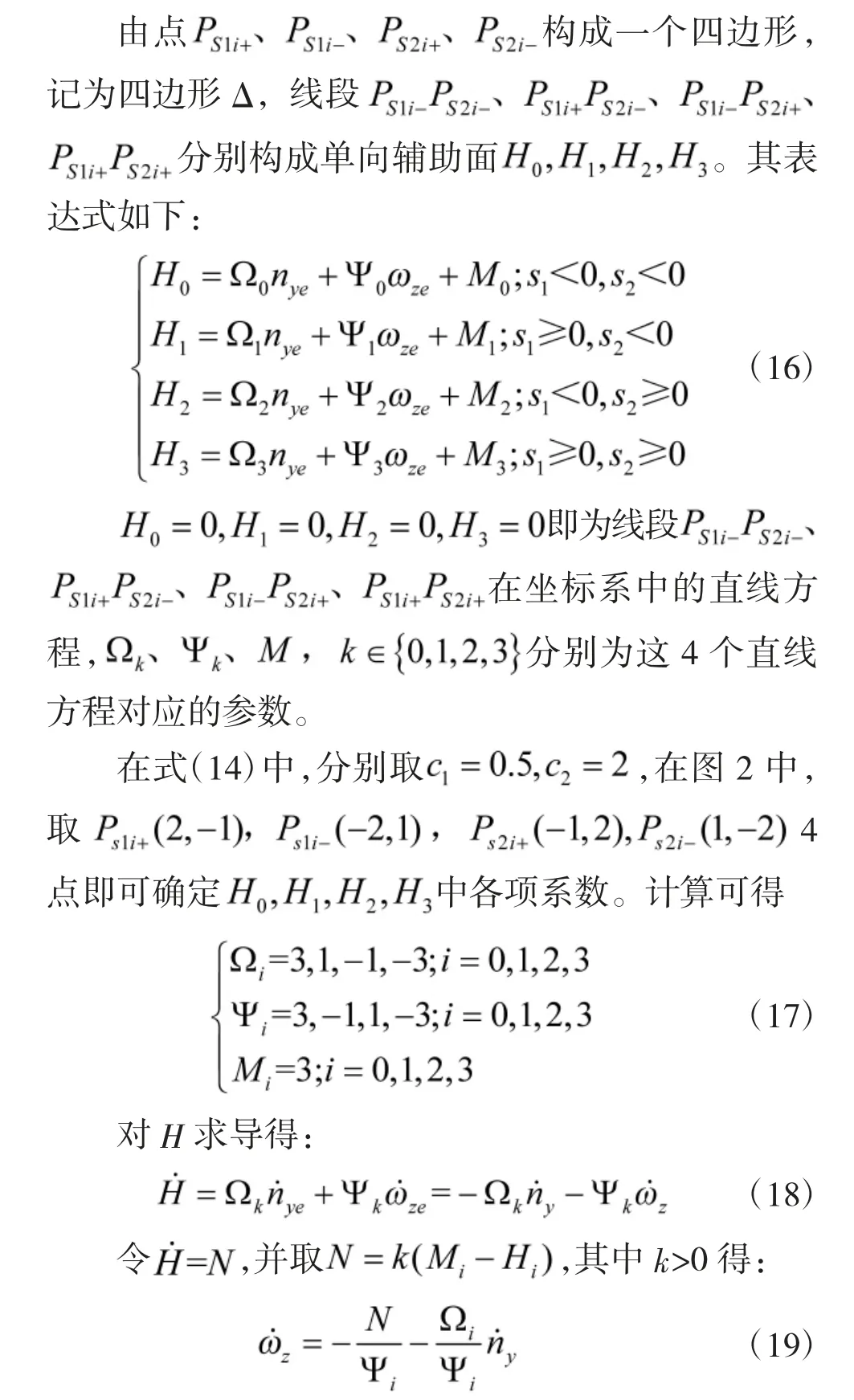
由式(6),式(7)得到控制器表达式:

下面给出其稳定性的证明。取系统的Lyapunov函数为



图3 M0-H0=0 直线位置图
4 仿真结果分析
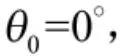

图4 两种控制系统法向过载输出

图5 普通滑模控制舵偏角输出
图6 单向滑模控制舵偏角输出
从图4 中可以看出,两种滑模变结构控制器都可以很好地跟踪调节系统法向过载的变化,最终使航弹的过载基本达到期望值。普通滑模控制过载曲线稳定在0.8 附近,大约为0.81。过渡过程时间约为ts=0.54 s,最大超调量Mp=26.1%。过渡过程品质较为良好。不足之处是存在一定的静差。单向滑模控制的过载输出稳定在0.83 附近,过渡过程时间大约为ts=0.48 s,几乎没有超调,过渡过程品质非常良好,但同样存在静差。由图5 可以看出,升降舵偏角的变化曲线上叠加了一个锯齿形的轨迹,这就是普通滑模控制器的抖振现象,这会导致控制系统性能变差,影响巡飞弹系统稳定性。从图6 可以看出单向滑模控制的舵偏角输出在起始的0.3 s 内有剧烈的抖振,随后升降舵偏角的变化曲线变得平缓光滑,抖振现象得到了明显的抑制。
5 结论
从仿真结果来看,这两种控制方法都可以比较好地跟踪和调节航弹的法向过载,使其达到要求的数值。两种控制方法都有一定的偏差。单向辅助面滑模控制方法与普通滑模控制方法相比,过载控制量存在4%左右的偏差,但是其震荡次数较少,收敛速度也较快,并且控制器抖振现象得到了明显的抑制。所以这种单向辅助面滑模控制在飞行控制中具有较好的应用前景。
猜你喜欢
文萃报·周五版(2022年46期)2022-11-25 10:24:42
水文地质工程地质(2022年2期)2022-04-13 09:02:34
民用飞机设计与研究(2020年4期)2021-01-21 09:15:46
新课程·中学(2019年7期)2019-09-17 13:41:15
中学生数理化·八年级物理人教版(2018年9期)2018-11-09 01:21:50
物理教学探讨(2018年1期)2018-02-13 09:26:52
北京航空航天大学学报(2016年8期)2016-11-16 01:51:04
光学精密工程(2016年1期)2016-11-07 09:02:03
中国铁道科学(2015年4期)2015-06-21 06:46:02
实验技术与管理(2014年12期)2014-03-11 18:38:28