
中国专利情报视角下的中日RV 减速机专利技术研究现状与发展态势对标研究
2021-03-22 06:46
农业图书情报学刊 2021年2期
(内蒙古农业大学图书馆,呼和浩特 010018)
1 引言
减速机是机器人的关键部件之一。减速机的类型很多,其中RV(Rotor Vector)减速器因拥有高疲劳强度、刚度和寿命,且回差精度稳定,成为高精度工业机器人必备元件。RV 减速机的市场需求随着机器人的行业的快速发展而供不应求,据 《2017 年世界机器人报告》 称,中国机器人行业正在每年以15%~20%的比例高速增长[1]。由此可以预测RV 减速机的市场需求量会非常巨大。专利是发明和创新产出的最佳成果,对专利进行分析可以明确某个国家或地区的技术发展态势和研发重点。采用对标方法对中国和日本的RV减速机专利技术情况进行分析,包括RV 减速器技术发展脉络、日本及中国专利申请状况、对处于垄断地位的申请人的多方面关注和分析等,掌握技术走向和研发热点,找出差距,改进RV 生产企业的经营战略与研发重点,争取更多的市场份额。
目前机器人领域的专利技术态势分析文献都是从机器人整体技术专利分析为主,只是按照不同领域机器人进行了专利技术现状及发展态势分许。如国内有不少研究人员从专利角度对工业机器人产业竞争态势进行了研究;谌凯等利用专利地图对农业机器人专利技术发展态势进行了研究;张树森等对林果采摘机器人专利发展态势进行了研究;张硕等对遥控型手术机器人的专利申请量、主要技术分支专利研究现状进行了分析,包括主从手、力反馈、触觉反馈等;肖丽梅分析了近10 年来康复机器人专利申请量及发展趋势、技术领域及技术布局等;朱哲等对家用清洁机器人专利态势做了分析[2-16]。以工业机器人核心部件——RV减速机关键技术为切入点,梳理研发脉络与态势,对标日本,揭示中国在该领域的差距与不足等方面的研究成果尚为数不多。
2 中日RV 减速机技术研发态势对标
本文利用德温特和SOOPAT 数据库对中国和日本的机器人关键部件——RV 减速机技术领域的专利文献进行检索与分析,采用对标研究法,即是以某行业优秀的企业或机构作为学习的目标,找出本领域技术上的不足之处,学习对标企业的优秀经验,实施并改进,经过系统的、持续评估与跟进,从而提高本行业技术水平的活动。
2.1 中日专利产出态势
专利申请趋势是反映技术研发情况的主要指标之一。从1985 年至今,日本共有1 094 件RV 减速机专利申请,中国有433 件RV 减速机专利申请。图1 是中日RV 减速机技术领域专利申请量随时间的变化态势。从1997 年开始,RV 减速机技术的研发整体呈现快速增长的态势。但中国研发相对处于起步阶段。RV减速器方面的专利申请数量2007 年开始显著增加,尤其是2010 年之后申请量持续快速增加。
1944 年,日本帝人制机株式会社成立,1961 年开始进行刚性高、负荷能力强的三曲柄式行星传动行走装置研发,并很快开始投产。1980 年,日本帝人制机株式会社解决了摆线齿形的精度不高的难题后,提出RV 传动理论,开始进入机器人行业。1983 年,日本启动机器人用传动装置(即RV 传动机构)的研究,这种传动装置与之前减速机相比较具有刚性更高、精度更高、振动更低的特性。1986 年,日本帝人制机株式会社(TEUIN SEIKI CO.,LTD,纳博特斯克前身)以此推出偏心差动式RV 系列减速机获得了日本专利。同年,日本帝人制机株式会社成功研制出应用于机器人的摆线针轮RV 减速器,并批量生产和投放市场,市场销量极好[17]。2003 年,帝人精机和纳博克并购成功,成为纳博特斯克公司(NABTESCO),企业高速发展,目前已经在全世界RV 减速机行业独占鳌头,垄断了60%以上的市场。
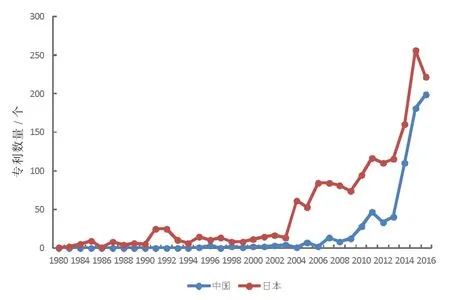
图1 中日减速机专利申请趋势Fig.1 Trend of applying for RV reducer patents in China and Japan
中国最早进行RV 减速机研发的是太原工学院的朱景梓教授,于1985 年研发并生产出双曲柄少齿差减速器,齿形为渐开线齿形。1989 年,天津职业技术师范学院与天津减速机厂共同研发并生产出双曲柄摆线针轮减速器。1986 年,中国“863 计划”启动,设置了智能机器人主题,青岛化工学院承担的“机器人用变厚齿轮RV 减速器研究”课题研发出一种RV 减速机;李力行教授主持的国家自然科学基金项目于1999年12 月10 日通过了辽宁省科委组织的技术鉴定,其中提出了机器人用高精度RV 传动的优化设计理论与优化新齿形,并研制出RV-250AⅡ样机[18]。但中国专利申请自1997 年才开始且至今申请量总量仅为日本的一半,究其主要原因在于核心技术掌握在日本企业手中,中国研发相对处于起步阶段。RV 减速器方面的专利申请数量在2007 开始显著增加,尤其是2010 年之后申请量持续快速增加。
2.2 中日专利技术竞争者分析
纳博特斯克(NABTESCO CORP)、住友重机械工业株式会社(SUMITOMO HEAVY INDUSTRIES)、谐波传动系统(HARMONIC DRIVE SYSTEMS)是日本RV 减速机申请量排名靠前的专利拥有者(表1)。全球高精度机器人减速机市场超过70%的市场份额由这三家占有[19]。在国内,南京康尼机电股份有限公司、南通振康焊接机电有限公司、昆山华恒焊接股份有限公司是申请RV 减速机专利最多的企业。从技术研发角度来看,秦川发展基于863 项目发展起来的RV 减速机产业化道路走得最远,而北京谐波传动所、江苏绿的和中技克美等企业在谐波减速机领域已经取得了突破,但较纳博特斯克和谐波传动系统还相去甚远。
虽然世界各国在华申请量近年来持续增加,但是其发明专利申请主要申请人,仍旧是日本企业。日本申请人在中国的RV 减速器方面专利申请量占到了近2/3,可见该技术领域日本非常重视在中国的专利布局,以实现对中国市场的垄断。
此外,中国的研究机构和高校主要是西北工业大学、天津职业技术师范学院、哈尔滨理工大学、广州中国科学院先进技术研究所,但是这些研究机构和高校在这方面的专利申请也相对较少。此外需要注意的是,个人申请人吴小杰、吴声震在这方面也有为数不少的专利申请和相关研究。

表1 中日RV 减速机专利申请人Top10 情况表 单位:个Table 1 Top 10 applicants of RV reducer patents in China and Japan
2.3 技术研发布局
发明创造专利技术分类体系一般采用国际专利分类号IPC 来体现不同的技术细分领域。由表2 可以看出中日关于RV 减速机热点技术(热点技术往往就是竞争最为激烈的技术领域)均集中在F16H1/32(传送旋转运动的齿轮传动装置,其中传动装置的中心轴线位于轨道齿轮的圆周之内),中国的RV 减速机热点技术不仅在齿轮传动本身,而且在齿轮传动性能及对RV减速机的效率的测试方面也申请了不少的专利。日本的技术热点全部集中在齿轮传动本身,帝人制机株式会社(纳博特斯克的前身)作为RV 传动技术的提出者和先驱者,1985 年其以PCT 申请形式公布了RV 减速器方面的第一件申请“用于工业机器人的减速装置”,将行星减速与摆线针轮减速有机结合起来,实现了两级减速,即偏心差动式RV 系列减速机,并在美国、加拿大、德国、韩国以及欧洲做了专利布局。之后还申请了发明“行星减速齿轮的控制装置”,为线针轮RV 减速器,并批量生产和投放市场,并通过其同族进入了美国、德国、英国,其专利布局日臻完善。按照国际公认的评价体系确定的高价值专利还有:CANON KK 公司2016 年在美国布局的专利“Gear mechanism,speed reducer,and robot arm”,专利号为US9427866B2;STAUBLI SA ETS 公司2007 年在欧洲布局的“Method of manufacturing a reducer,reducer and robot includingsuch a reducer”,专利号为EP1816374A1;FANUC LTD 公司2006 年申请“Articulation system for robot comprising a speed reducer provided with vibration cancelling means”,专利号为EP1533544A3 等。在60分以上(满分100)高价值专利中,帝人制机株式会社和纳博特斯克公司的专利占比达58.1%。
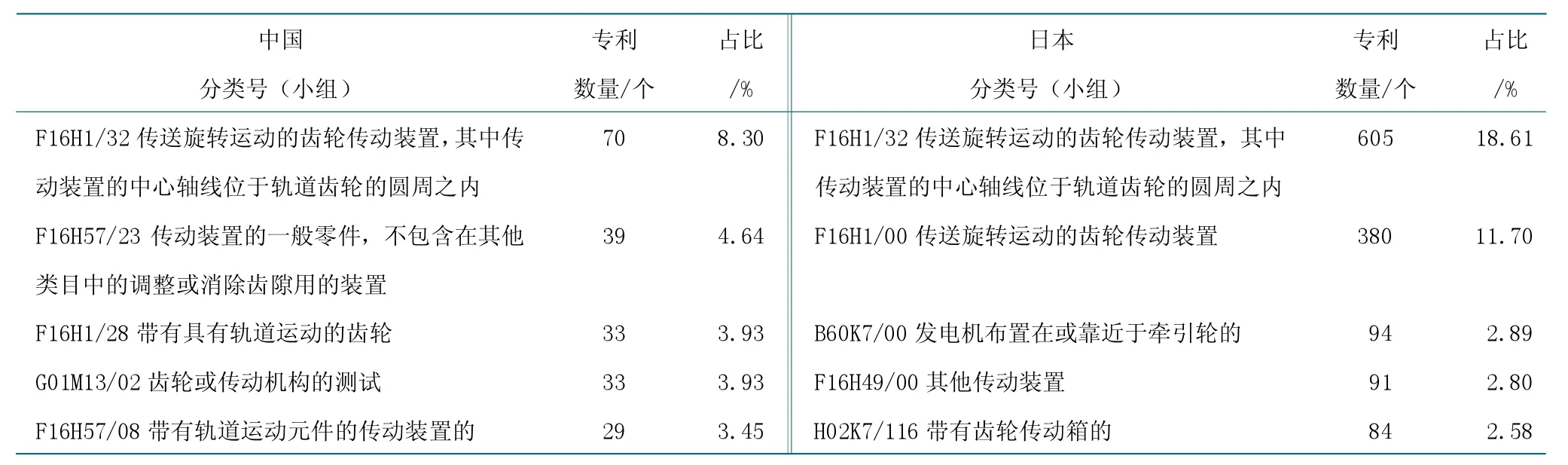
表2 中日RV 减速机专利技术热点IPC 比较Table 2 Comparison of RV reducer patent hotspot technologies in China and Japan
在中国技术研发热点也主要集中在F16H1/32(传送旋转运动的齿轮传动装置,其中传动装置的中心轴线位于轨道齿轮的圆周之内),典型代表为南通振康机械有限公司申请的“采用锥齿轮行星减速机构的RV减速器”(专利号:CN202176678U),目前是中国RV减速机专利中的高价值专利,其技术原理是将中心轮与行星轮的啮合间隙调整为最佳状态,采用直齿锥齿轮结构降低了对齿轮制造精度的要求,减小了回差,提高了运动精度。但中国制造的RV 减速机总体上不及日本,体现在以下几个方面:在噪声和发热量方面,劣于日本纳博特斯克的减速机,噪声和发热会造成齿轮啮合不良,有超额摩擦磨损及内部应力,影响机械寿命[20];在稳定性方面,国产的不如进口的,在运行的前期较好,运行一段时间后,效率递减,RV 减速机性能急剧下降;在加工精度方面,由于RV 减速器对零件的加工、装配精度及材料要求非常高,但受中国基础加工的水平限制,尤其是加工RV 减速机的关键设备全部依赖进口,中国的精密制造技术及设备尚不能达到加工RV 减速器的水平[21],造成产品精度还有所欠缺。此外,目前中国的RV 减速机在与国内自己生产研发的机器人在技术上不匹配,与国产机器人的伺服系统、运动控制系统不能高度吻合[22]。
专利的技术功效方面,则集中在RV 减速器的精度提高、复杂性降低、效率提高和成本降低方面(图2)。其中重庆大学在南通振康焊接机电有限公司申请的RV 减速器专利在减速机的复杂性降低和精度提高方面非常重视,而重庆大学则将RV 减速器技术研发重点放在了精度提高方面和减速机效率提高方面。
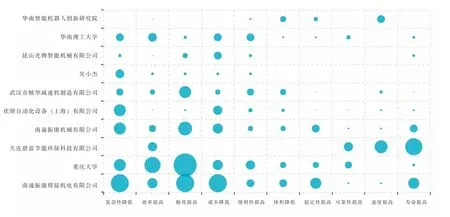
图2 专利技术功效气泡图Fig.2 The bubble chart of patent technological efficacy
2.4 专利申请的法律状态
日本RV 减速机专利就在中国申请的法律状态来看,半数以上的专利申请已获专利权并处于有效状态,超过2/5 的专利申请处于实审过程中,仅有极少部分(1%)专利权终止,仅仅4%的专利申请未被授予专利权。2017 年有22 件专利到期,从2026 年开始有大批的专利到期。
中国的RV 减速机专利法律状态中,有权的占54.5%,有20.1%处于实审状态,公开的占6%,避重放弃(同一个专利申请,同时申请实用新型和发明,实用新型会首先授权,等到发明授权时,实用新型就需要放弃权利)和驳回的占5.6%,未交年费的7.9%,届满的不足1%。这种现状主要是由于在中国专利申请主要集中在最近3 年,大量的专利申请正在实审中,同时由于RV 减速器正处于蓬勃发展时期,申请人往往通过坚持专利权有效来坚持自身对于市场的判断和需求。
日本RV 减速机专利技术虽然起步早,但从2026年开始将有大批的专利权期限(专利权的法定期满终止时间,发明专利的期限为20 年;实用新型专利和外观设计专利的期限为10 年,均自申请之日起计算)到期,一旦到期该专利技术即刻公开,企业和个人可无偿使用,垄断优势就会消失。有些技术价值度较高的专利保护期届满即可公开使用,例如申请日为1998 年3 月3 日、申请人为HONDA MOTOR CO LTD 的专利号为JP10058371A 的日本RV 减速机专利“INDUSTRIAL ROBOT”专利保护期限已经到期,该技术可公开使用了;申请日为1998 年3 月6 日、申请人为ALSTHOM CGE ALCATEL 的专利号为JP09149099 的日本 RV 减速机专利“ METHOD AND SERVO SYSTEM FOR CONTROLLING ROTARY MACHINE AND ROTARY MACHINE EQUIPPED WITH THE SYSTEM”已经失效了,即可为我所用。对于超过专利权期限的失效专利,中国可以在原来的技术方案基础上,开发新的或改进的技术方案取得专利保护。但必须注意在开发利用失效专利时做好专利检索工作,避免侵犯他人专利权[23],避免出现原有专利权人或他人围绕失效专利有了新的发明并获得专利权,这时开发利用已失效的专利仍存在侵犯专利权的情况。
3 结论
笔者以专利视角对中国和日本的RV 减速机专利技术研发现状与发展态势进行了研究,围绕中日两国RV 减速机专利技术发展历程、中日专利技术竞争者分析、专利技术研发布局、高价值专利、专利申请的法律状态等方面进行了比较研究。研究结果显示:中国的RV 减速机专利技术虽然发展较快,但无论在数量还是质量方面均不及日本,在技术领域,尚未掌握核心技术,加工精度很难超越日本,需加强研发力度,研发适应本土生产的机器人的RV 减速机。研究将对标研究方法应用于中日两国机器人核心部件——RV 减速机的专利技术研发态势上,在研究对象与方法上有一定创新性。但是受到分析水平限制,仅从专利申请技术角度比对,未能通过共词分析的方法找出技术研发的未来热点领域,这给比对结果的全面性带来一定影响,未来还需在核心专利和专利实施率方面进行深入研究,力求为中国机器人减速机专利技术的发展提供实用的参考情报。
猜你喜欢
汽车实用技术(2022年13期)2022-07-19
锻压装备与制造技术(2022年3期)2022-07-18
防爆电机(2022年3期)2022-06-17
汽车工程师(2021年12期)2022-01-18
商品与质量(2019年28期)2019-11-28
电子制作(2019年12期)2019-07-16
军事文摘(2018年24期)2018-12-26
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
现代商贸工业(2016年35期)2016-04-09
