双星形联结发电机供电的24脉波变流器及其控制
2021-03-22 06:26李维斌陈俊宏王雅丽
控制与信息技术 2021年1期
郑 雪,李维斌,陈俊宏,王雅丽
(核工业西南物理研究院,四川 成都 610225)
0 引言
HL-2M装置是我国新一代磁约束核聚变装置,也是我国目前规模最大、参数要求最高的先进托卡马克装置,主要用于等离子体物理实验及其聚变工程技术研究。稳定的等离子体放电是开展高质量物理实验的主要基础。等离子体的约束、加热和控制分别通过环向场(TF)线圈、中心螺线管(CS)线圈和极向场(PF)线圈等产生的磁场作用而表现的,其中D形分布的16组PF线圈主要控制等离子体的截面位形和位移,PF7线圈需要兼顾与等离子体位形和垂直不稳定性的控制。在拉长三角形变偏滤器位形(实现核聚变的优化位形)下,存在大而快的等离子体沿着垂直方向(向上或向下)快速离散的一种边缘局域模(edge localized mode,ELM)现象[1],需要进行有源反馈控制。国内国际上的许多装置主要采用以IGBT全桥逆变或者晶闸管全桥整流为基础的电源来控制等离子体垂直不稳定性的主要手段,但均面临着高频率与小纹波性能无法兼顾的问题。本文设计了一种24脉波变流器,在兼顾电压纹波小的同时一定程度上提升了输出频率。其由双星形联结绕组发电机(简称“双Y发电机”)供电,并通过变压器一次侧进行移相,不仅满足了双Y发电机的特殊性要求,而且简化了电路,节约了成本。值得研究的是,如果PF7线圈电源的电流正负分布严重不对称,则需要电源进行相应的快速响应,及时输出所需要的电流。
1 双Y发电机供电的24脉波变流器结构
本文设计的变流器采用两组24脉波变流器并以正、负两组带环流的方式联合运行,其拓扑结构如图1所示,负载为阻感负载。
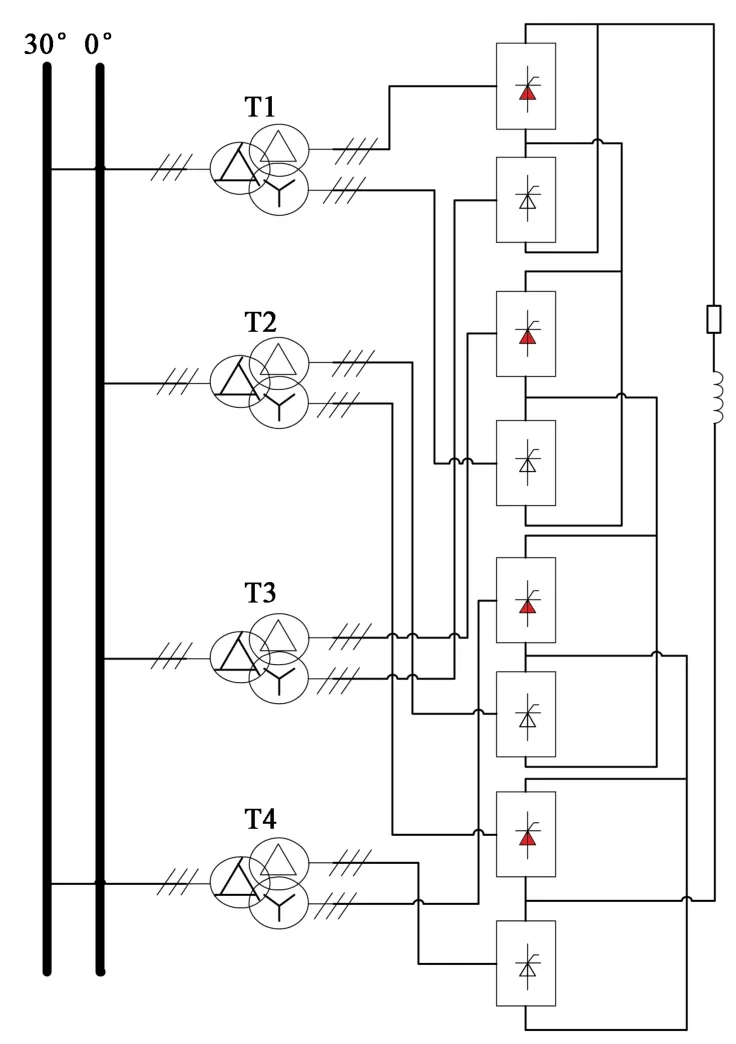
图1 24脉波变流器拓扑结构Fig.1 Topology of the 24-pulse converter
由于发电机为两个星形联结绕组结构,具有30°的相位差,所以在变压器设计和变压器与整流桥配对上有一定的设计难度,需要充分利用发电机双星形联结绕组的特殊性。
1.1 双Y发电机
本设计所采用的双Y发电机容量为300 MVA,频率范围为70~110 Hz,输出形式为双Y绕组互错30º[2],工作方式为脉冲供电。发电机组的主要工作原理如下:以相对较小功率在较长的时间内从电网吸收能量并将整个机组轴系逐渐地加速到额定转速,把电能转换成机械能储存在机组轴系中;当需向负载供电时,发电机以数十倍的功率放电,将储存在机组轴系中的机械能被转换成电能提供给负载。表1示出该双Y发电机的部分参数。

表1 双Y发电机参数Tab.1 Parameters of the double Y motor-generator
1.2 移相变压器
电力变压器高、低压绕组的线电压既可以同相位,也可以移相30 °的倍数角度;而移相变压器可以进行任意角度的移相,所以在多脉波二极管和多脉波晶闸管整流电路中应用较多。在这些电路中,运用移相变压器不仅可以实现多脉波输出,同时也可以消除谐波。
对于三相移相变压器来说,可以采用一次侧为延边三角形联结的结构,也可以采用二次侧为延边三角形联结的结构[3]。本文的移相变压器一次侧为延边三角形联结,二次侧分别为三角形和星形联结(图1)。其中一次侧绕组由匝数为N1和N2的两部分线圈组成,N2线圈采用三角形联结方式,每一相分别与N1线圈进行串联,构成延边三角形联结。二次侧绕组由匝数为N3和N4的两部分线圈组成,N3线圈为三角形联结,N4线圈为星形联结。

图2 三相移相变压器绕组联结图Fig.2 Connection diagram of the windings of three-phase shift transformer
由图2所示的绕组连接方式可以画出其相量关系(图3),其中δ为一次侧的移相角度,E表示电动势。

图 3 三相移相变压器相量图Fig.3 Vectogram of the three-phase shift transformer
绕组电动势与移相角的关系如式(1)所示:

而电动势与匝数成正比:

将式(2)和式(3)代入式(1),则有

所以,当移相角和变比已知时,可以得出匝数的大小。
图4示出移相变压器的相量图。图4(a)为一次侧移相+7.5°、二次侧为三角形联结和星形联结的移相变压器相量图;图4(b)为一次侧移相-7.5°、二次侧为三角形联结和星形联结的移相变压器相量图。

图4 移相变压器相量图Fig.4 Vectogram of phase-shifting transformer
2 变流器工作模式
双Y发电机分别向4台三绕组变压器(T1~T4)供电[4-5]。变压器均采用一次侧移相,二次侧绕组分别为三角形联结和星形联结,T1和T3一次侧移相+7.5°,T2和T4一次侧移相-7.5°;4台三绕组变压器输出接8个全桥整流桥,分为正负两组变流器。T1和T4接到0°移相的Y发电机,T2和T3接到30°移相的Y发电机,由此可得出4台变压器二次侧相位情况(表2)。

表 2 变压器相位表Tab.2 Phases of the transformers
如图5所示,实心的4个整流桥为正组变流器,串联之后可以得到24脉波的输出;另外4个整流桥为负组变流器,串联之后也可以得到24脉波输出。对同相位的两个变压器二次侧绕组所连接的全桥整流桥进行反向并联,反向并联的2个整流桥分别属于正组变流器和负组变流器。正组整流桥与变压器接线如图5(a)所示,负组整流桥与变压器接线如图5(b)所示。可以看出,无论是正组整流桥还是负组整流桥投入工作时,4台变压器均被接入电路,变压器负荷均衡,同一个变压器的2个二次侧绕组分别连接正组整流桥和负组整流桥;4台变压器只有2种连接组别,电路结构相对简单,且变压器成本可以得到控制。

图 5 24脉波变流器工作模式Fig.5 Working modes of the 24-pulse converter
当电流大于零时,仅正组变流器投入工作;当电流小于零时,仅负组变流器投入工作;当电流趋近于零时,设定一个电流过零窗口。为了使得电流可以平滑过零,正负组变流器在过零窗口同时投入工作,即带环流运行。鉴于双Y发电机的特殊性和变流器的控制方式,此种拓扑具有以下几个优点:
(1)变压器容量小且负荷均衡。
(2)不论哪种工况,发电机和网侧负荷都均衡。
(3)当某个整流桥发生故障而引起环流失控时,只影响与故障整流桥反向并联的整流桥,最大限度地保护了其他整流桥。
(4)当发生环流时,虽然环流会流过发电机的两个星形绕组,如图5(c)所示,但由于双Y发电机具有较大的阻抗,因此可以有效地抑制环流,减小环流对回路的影响。
(5)变流器可以进行四象限运行,以满足更多的运行工况需求。
(6)变流器可以实现电流平滑过零,电流、电压连续可调。
3 控制策略
24脉波变流器的作用是在等离子体的垂直位移发生偏移时,对其快速响应并及时修正偏移量。在实际运行过程中,等离子体的垂直位移是以电流的形式送入变流器控制系统并进行计算的,此电流可以按照给定的波形进行变化。因此在变流器中加入负反馈模块并采用PID算法对输出电流进行实时监测,一旦输出电流偏离给定值,立刻对电流偏移量进行实时修正。
控制系统需要读取负载电流数据、控制参数等,具体步骤如下:读取负载电流数据,与给定值进行对比,并将结果送入PID模块进行计算,将所得到的晶闸管控制角信号送入晶闸管触发电路,最终得到与给定值相同的负载电流(图6)。
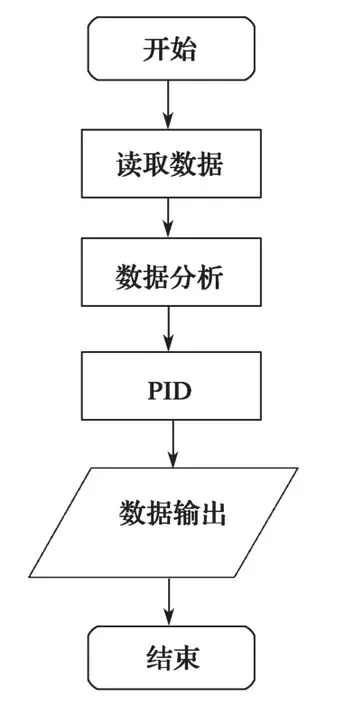
图 6 24脉波变流器控制流程图Fig.6 Control flow chart of the 24-pulse converter
对仿真模型中PID参数进行选择:首先,为电路设计负反馈环节,将负载电流id作为输出采样值与给定值进行比较;其次,去除PID控制器模块中的积分项(I)和微分项(D),使控制器为纯比例(P)调节控制方式,由0逐渐加大比例增益P,直至系统出现振荡,或从此时的比例增益P逐渐减小,直至系统振荡消失,记录此时的比例增益P,即P=10。在确定控制器的比例参数P后,先设定一个较大的积分时间常数I(一般取比例系数的十分之一),将给定信号设置为常数直流输出(此处设为10 kA),观察输出电流波动Δi情况(表 3)。可以看到,在P=10的条件下,I=0.1和I=0.08时,可以完全消除静差。最终参数选取P=10,I=0.1。

表 3 不同积分时间常数时的电流波动情况Tab.3 Fluctuation of current under different integral coefficient
当电流为正时,控制系统解封正组晶闸管、封锁负组晶闸管,并将计算得到的晶闸管控制角信号送入正组晶闸管触发电路;当电流为负时,控制系统解封负组晶闸管、封锁正组晶闸管,并将计算得到的晶闸管控制角信号送入负组晶闸管触发电路。理想情况下,在电流过零时,正、负组变流器可以进行理想切换,使得电流可以平滑过零。实际应用时,由于信号延时、开关器件动作不一致等因素,会造成因正、负组变流器切换不理想而导致的电流断续情况的发生。为此,需要在控制过程中设置电流过零窗口期,即在-100~100 A电流范围内,当电流趋近于零时,同时解封正、负组晶闸管。此时电流将分成两部分:一部分流过负载,另一部分流过正、负组变流器,形成环流,此种方式被称为逻辑带环流模式。采用这种控制方式,在保证电流跟随性的同时,还能够使得电流平滑过零,从而保证变流器输出质量。
4 仿真验证
对图7所示的24脉波变流器拓扑进行Matlab仿真建模。采用电流反馈进行控制,设定一个给定电流,利用负反馈模块进行实时控制,以保证输出电流的跟随性;当输出电流发生偏移时,PID算法将会对其进行修正。为了便于仿真与分析,假设所有开关器件均为理想器件,忽略变压器的漏感和电阻,则发电机为可被等效为理想电压源。采用电压源模块代替发电机,一共有4个电压源模块,模块频率为100 Hz,输出电压为3 000 V。其中,2个同相位模块(0°)用于模拟发电机Y绕组1;另两个同相位模块(30°)用于模拟发电机Y绕组2。

图7 24脉波变流器Matlab模型Fig.7 Simulation model of the 24-pulse converter
变压器为一次侧移相变压器,其与变流器的连接方式与图1的相同,负载参数被设置为R=7.5 mΩ,L=7.3 mH。图8所示为变流器触发电路[6],其中α为触发角信号,可以通过改变α来改变输出电压;block为封锁/解封锁信号,0表示解封锁,1表示封锁。
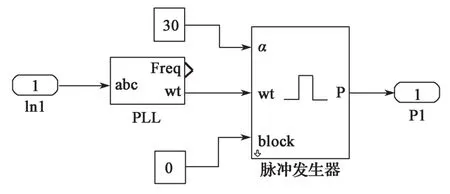
图8 触发电路模块Fig.8 Trigger circuit
当电流大于零时,正组变流器工作;当电流小于零时,负组变流器工作;当电流即将过零时,采用逻辑带环流模式工作,正、负组变流器被同时开启。设置在电流过零时间窗口内发生环流,采用负反馈调节。设定一个给定电流作为负反馈的参考值,采用PID控制对输出电流进行采样,与给定电流进行比较,将输出电流偏离给定电流的偏移量送入PID模块,经过计算之后,得到变流器触发角α,将触发角送入触发电路模块。
图9(a)为输出电流和给定电流的仿真波形,可以看出,输出电流波形和给定电流波形基本重合,电流具有很好的跟随性,纹波率仅为1.1‰。图9 (b)为电流过零处的放大波形,可以看出,电流过零波形十分平滑。得益于PID控制算法,输出电流能够快速响应并且具有较好的跟随性。
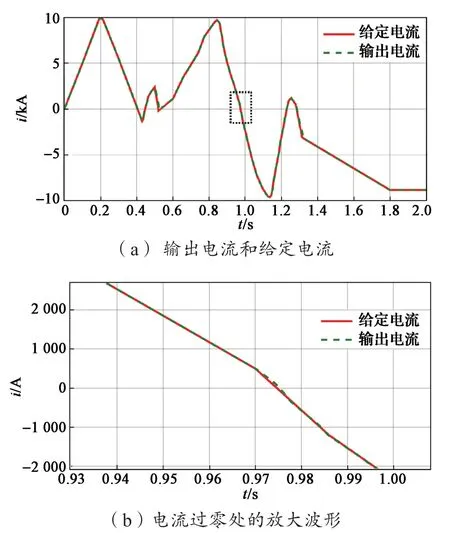
图9 24脉波变流器电流仿真波形Fig.9 Simulated current waveforms of the 24-pulse converter
由于发电机两个星形绕组之间的电抗非常大,可以起到平衡电抗器的作用。图10示出该变流器给定电流、输出电流、输出电压和过零处的环流仿真波形,可以看出环流最大值只有2 kA左右。如果在电路中添加平衡电抗器,其环流值将会更小。

图 10 24脉波变流器电流、电压、环流仿真波形Fig.10 Simulated waveforms of current, voltage and circulating current of the 24-pulse converter
5 结语
本文提出并设计了一种由双Y脉冲发电机供电的级联24脉波四象限变流器。采用这种拓扑具有以下优点:变压器与网侧负荷均衡,变压器负荷小;4个变压器只有两种结构,节省成本;在发生环流失控时可以有效地保护整流桥;所采用的控制方式可实现大电流无环流运行,小电流逻辑有环流运行,电流具有很好的跟随性;采用正负组联合运行的方式可以实现四象限运行;发电机双Y之间较大的阻抗可以有效抑制环流,平衡电抗器可以很小。仿真结果验证了这种变流器结构应用于双Y发电机特殊供电条件的可行性,能够满足HL-2M装置对等离子体垂直不稳定性控制的需求,为下一步的工程实施提供了坚实的基础。
猜你喜欢
现代信息科技(2022年20期)2022-11-17
大电机技术(2022年3期)2022-08-06
粮食问题研究(2022年2期)2022-04-25
电气传动自动化(2022年1期)2022-03-24
河北农机(2021年12期)2022-01-06
科学技术创新(2021年21期)2021-07-30
成都信息工程大学学报(2021年2期)2021-07-22
铁道机车车辆(2021年3期)2021-07-12
舰船电子工程(2019年11期)2019-11-28
电子制作(2019年10期)2019-06-17